31
Изобретение относится к горной промышленности, а именно к механизации и автоматизации ряда операций при проведении горных выработок.
Цель изобретения - повышение эффективности работы путем расширения технологических возможностей.
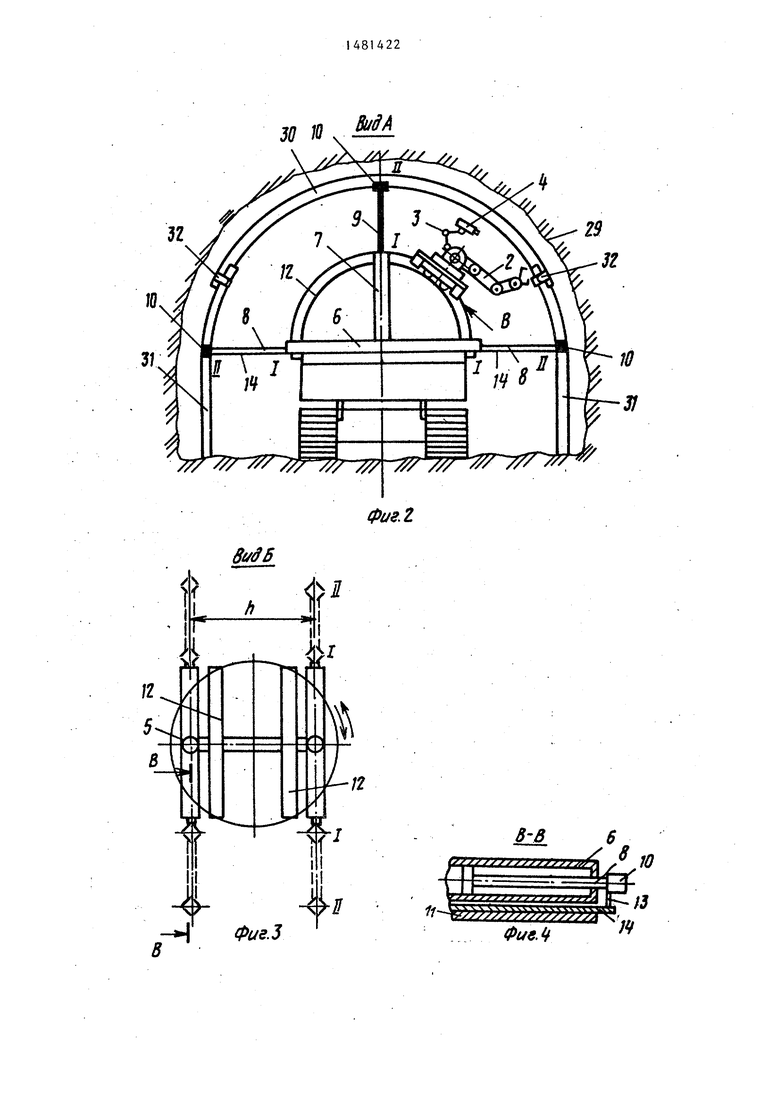
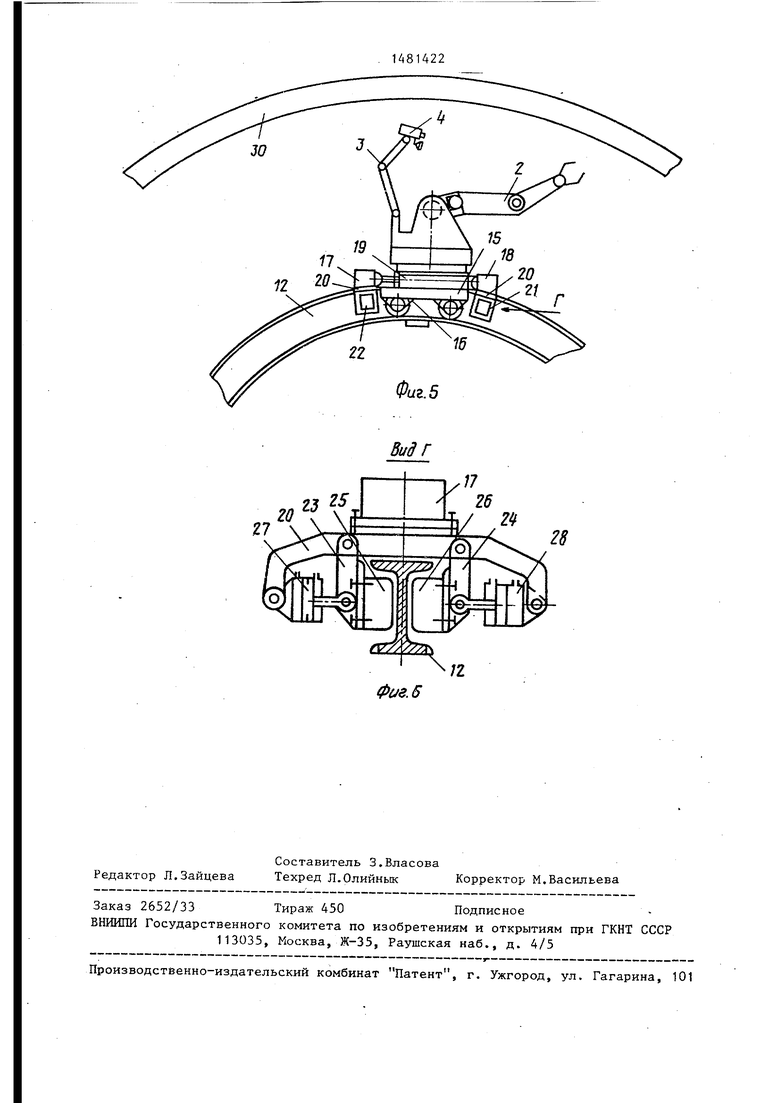
На фиг,1 изображен шахтный самоходный манипулятор, общий вид; на фигг2 - вид А на фиг.1, на фиг.З - вид Б на фиг И (вспомогательный манипулятор не показан); на фиг о 4 - сечение В-В на фиг.З , на фиг.З - манипулятор, общий вид; на фиг.6 - вид Г на фиг„5,
Шахтный самоходный манипулятор состоит из дистанционно управляемой тележки 1 с гидроотбойным оборудованием, двух манипуляторов 2, поворотных головок 3 с телевизионной камерой 4, вспомогательного манипулятора 5, состоящего из двух систем жестко связанных, перпендикулярно расположенных телескопических рычагов в виде гидроцилиндров горизонтального 6 и вертикального 7 перемещения штоков 8 и 9 со схватами 10С
На раме тележки 1 установлена по
0
5
щей из двух частей, каждая из которых имеет на концах опоры 17 и 18. Одна часть балки акрештена на платформе и имеет внутри направляющие, в которых размещена другая часть балки и которые служат для перемещения составных частей балки относительно друг друга. Перемещение составных частей балки осув .ествляется силовым гидроцилиндром 19, связанным с опорами 17 и 18 балки. На опорах 17 и 18 закреплены основаниями 20 тормозные устройства 21 и 22. Каждое тормозное устройство выполнено в виде двух рычагов 23 и 24 с фрикционными накладками 25 и 26, шарнирно соединенных с основаниями и штоками гидроцилиндров 27 и 28з корпуса которых также соединены шарнирно с ос ованием,.
На платформе 15 закреплен механизм подъема, включающий поворотное устройство манипулятора 2. В центре планшайбы 11 могут быть размещены 5 магазины с быстросменными схватами, инструментом и сменным оборудованием.
Па чертеже обозначены: штрек 29,
верхняк 30, стойки 31 арочной крепи, хомуты 32 Пульт управления и прием0

| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
| Подвесной шахтный манипулятор | 1988 |
|
SU1580019A1 |
| Подвесной шахтный манипулятор | 1986 |
|
SU1461977A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| Шахтный самоходный манипулятор | 1989 |
|
SU1724883A1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩИМ КОМПЛЕКСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1998 |
|
RU2131976C1 |
| Подвесной шахтный манипулятор | 1986 |
|
SU1320429A1 |
| КОМПЛЕКС ДЛЯ РЕМОНТА ГОРНЫХ ВЫРАБОТОК | 1995 |
|
RU2098632C1 |
Изобретение относится к горной промышленности. Цель - повышение эффективности работы путем расширения технологических возможностей. Для этого шахтный самоходный манипулятор (М) снабжен основным, дополнительным М 2 и вспомогательным М. На раме тележки шахтного самоходного М установлено опорно-поворотное устройство с планшайбой (ПШ). Последняя выполнена с направляющими балками арочной формы, на которых установлены М 2. С двух сторон М 2 на ПШ размещены системы жестко связанных, перпендикулярно расположенных телескопических рычагов, из которых состоит вспомогательный М. При этом ПШ имеет выдвижные направляющие планки. Системы телескопических рычагов выполнены в виде горизонтального гидроцилиндра 6 с двумя выдвижными штоками и вертикального гидроцилиндра 7. Выдвижные штоки гидроцилиндра 6 связаны с направляющими планками. Этим обеспечивается одновременная установка двух секций арочной крепи, замена и демонтаж неисправных узлов шахтного М без остановки работ по креплению горной выработки. 1 з.п. ф-лы, 6 ил.
воротная на 360° планшайба 11 опорно- 30 ное устройство телевизионной установповоротного устройства, на которой закреплены две направляющие двухтав- ровые балки 12, имеющие арочную форму, соответствующую профилю устанавливаемой арочкой крепи в поперечном сечении штрека. Кроме того5 на планшайбе 1 1 установлен вспомогательный манипулятор 5 с гидроцилиндрами горизонтального 6 и вертикального 7 перемещения штоков 8 и 9 со схватами 10„ Штоки 8 с помощью пальцев 13 жестко соединены с выдвижными направляющими планками 14, установленными в пазах планшайбы 11, что обеспечивает жесткость и надежность системы поддержки стоек арочной крепи вспомогательным манипулятором и препятствует вращению штоков 8 вокруг продольной оси. Расстояние между осями вертикально расположенных гидроцилиндров 7 вспомогательного манипулятора 5 равно шагу между секциями устанавливаемой арочной крепи.
Каждый манипулятор 2 установлен на балке 12 с помощью платформы 15 посредством кареток 16, Платформа 15 перемещается по направляющей балке 12 механизмом передвижения, выполненным в виде раздвижной балки, состоя
0
щей не показаны.
Шахтный самоходный манипулятор работает следующим образом.
Работа манипулятора по установке 5 и сборке двух секций арочной крепи совмещена по времени с работой гидроотбойного оборудования. При выполнении сборки арочной крепи, предусматривается следующая последовательность операций
Оператор, наблюдая через приемное устрокстго телевизионной установки, расположенной на пульте управления, управляет шахтным самоходным манипулятором и устанавливает егс по продольной оси ттреъэ 29. Штоки 8 и 9 со схватамк 10 находятся в исходном положении „
Манипулятором 29 расположенным , берут верхняк 30 крепи и устанавливают в схвате 10 переднего вертикального гидроцилиндра 7 вспомогательного манипулятора 5 (приблизительно посередине верхняка)„ Передний манипулятор 2 с помощью привода перемещения по балке размещен в стороне от зоны манипулирования. Фиксируют верхняк 30 схватом 10 переднего вертикального гидроцилкнцра 7 вспо5
0
5
могательного манипулятора 5, Перемещают верхняк 30 с помощью штока 9 на необходимую высоту (позиция II)„
Манипулятором 2, расположенным сзади, передают левую стойку 31 в схват переднего манипулятора 2. Выдвигают в требуемое положение одновременно левый и правый штоки 8 совместно с направляющими планками 14 переднего горизонтального гидроцилиндра 6 (позиция II), Устанавливают с помощью переднего манипулятора 2 левую стойку 31 в схват 10, расположенный на левом штоке 8 гидроцилиндра 6. Фиксируют левую стойку схватом 10„ Передают правую стойку 31 манипулятором 2, расположенным сзади, в схват переднего манипулятора 2„
Повторяют аналогичные манипуляции с правой стороны
Опускают с помощью переднего гидроцилиндра 7 вспомогательного манипулятора 5 верхняк 30 до совмещения его концов с верхней частью стоек 31 При необходимости разжимают верхний схват 10 и с помощью переднего манипулятора 2 устанавливают верхняк симметрично относительно продольной оси штрека.
Смещают с помощью переднего манипулятора 2 хомуты 32 (предварительно надетые на верхняк) на середину нахлестываемой части верхняка и стоек ,и фиксируют хомуты 32, скрепляя стой- /ки с верхняком, Одновременно манипулятор 2, расположенный сзади, производит аналогичные описанным манипуляции по установке второй секции арочной крепи с помощью вспомогательного манипулятора 5, расположенного сзади. С помощью манипуляторов 2 устанавливают стяжки. Разжимают схваты 10 штоков гидроцилиндров о Перемещают штоки в исходное положение 10
Возможны другие варианты последовательности операций по установке и сборке секций арочной крепи, с помощью манипулятора выполняются все необходимые операции по установке затяжек, установке и сборке секций подвесной монорельсовой дороги,
В случае отказа одного из манипуляторов 2 или 5 системы перпендикулярно расположенных телескопических рычагов вспомогательного манипулятора операции установки, сборки и де0
5
0
монтажа могут быть выполнены исправными манипуляторами-дублерами, но с уменьшенной .производительностью труда, Второй манипулятор 2 может быт использован при работах по демонтажу неисправного манипулятора 2 с балки 12 и установке нового манипулятора 2 на балку„ При демонтаже одного из манипуляторов 2 другой манипулятор 2 осуществляет удержание первого от скатывания по направляющей балке 12 вниз и медленное перемещение за счет раздвижного механизма с удержанием демонтируемого манипулятора до касания последнего о платформу транспортного средства. Зона обслуживания при этом остается прежней за счет наличия поворотной на 360° планшайбы 11 опорно-поворотного устройства
Формула изобретения
5
0
5
0
5
1„ Шахтный самоходный манипулятор, включающий дистанционно управляемую тележку, раму с опорно-поворотным устройством и планшайбой, на которой установлен основной манипулятор со схватами, поворотной головкой и теле- о визионной камерой, аппаратуру управления и вспомогательный манипулятор, имеющий телескопические рычаги со схватами, отличающийся тем, что, с целью повышения эффективности работы путем расширения технологических возможностей, он снабжен дополнительным манипулятором со схватами, поворотной головкой и телевизионной камерой, а вспомогательный манипулятор выполнен в виде закрепленных на планшайбе двух систем жестко связанных, перпендикулярно расположенных телескопических рычагов, между которыми размещены основной и дополнительный манипуляторы, при этом планшайба выполнена с направляющими балками для основного и дополнительного манипуляторов и выдвижными на- правляющими планками, причем телескопические рычаги вспомогательного манипулятора выполнены в виде гидроцилиндров со штоками, одни из которых имеют два штока, соединенных с выдвижными направляющими планками.
2 о Манипулятор по п„1, о т л и - чающийся тем, что направляющие балки имеют арочную форму.
5
CNJ
см r
со
-
Cvl
I
tSJ
I
N Х ЧЛ
Фиг. 5
Вид Г
17
фиг. 5
| Подвесной шахтный манипулятор | 1984 |
|
SU1209888A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
