В настоящее время подъем спецгрузов на самолеты производят обычно с помощью подъемников различных систем, выполненных с применением одной или нескольких лебедок, снабженных тросами или полиспастами, с ручным, гидравлическим или электрическим приводом.
Сложность такого способа подъема, громоздкость подобных устройств, а также непроизводительная затрата времени при использовании их очевидны. Кроме того, существующие подъемники недостаточно полно обеспечивают необходимые степени свободы для груза при проведении подъема и погрузки его.
В описываемом подъемнике эти недостатки устранены и грузу, укрепляемому на самолете, обеспечены 4-6 степеней свободы. Это осуществляется при помощи подвешенной в трех точках на двух колесных осях рамы, оборудованной двумя или четырьмя винтовыми или гидравлическими домкратами, ходовыми винтами, шестеренчатой передачей от двигателя и ложементами с шаровыми опорами, связанными попарно тягами при помощи шарнирного сочленения.
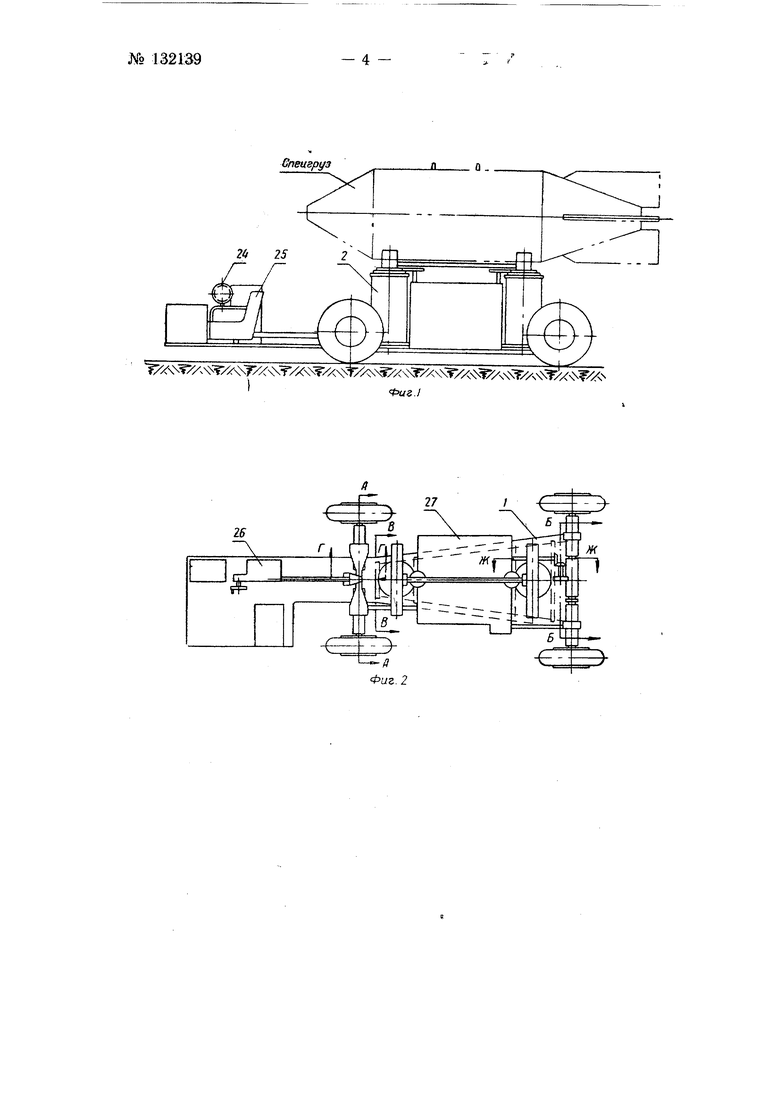
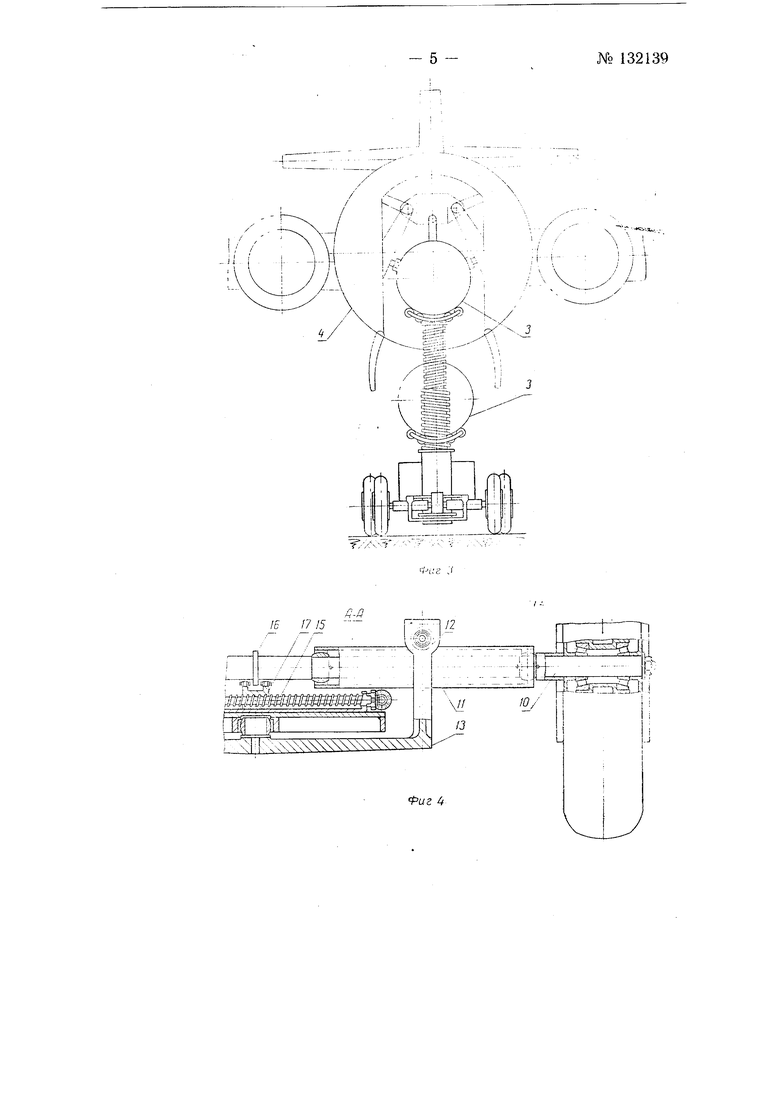
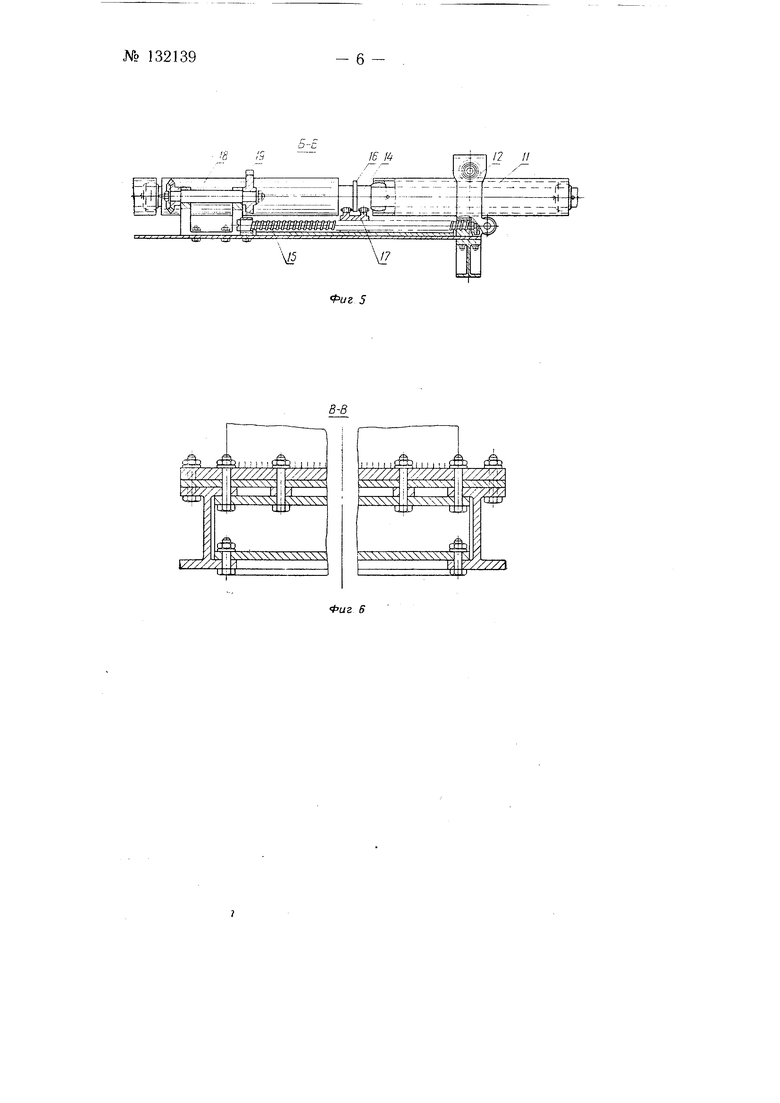
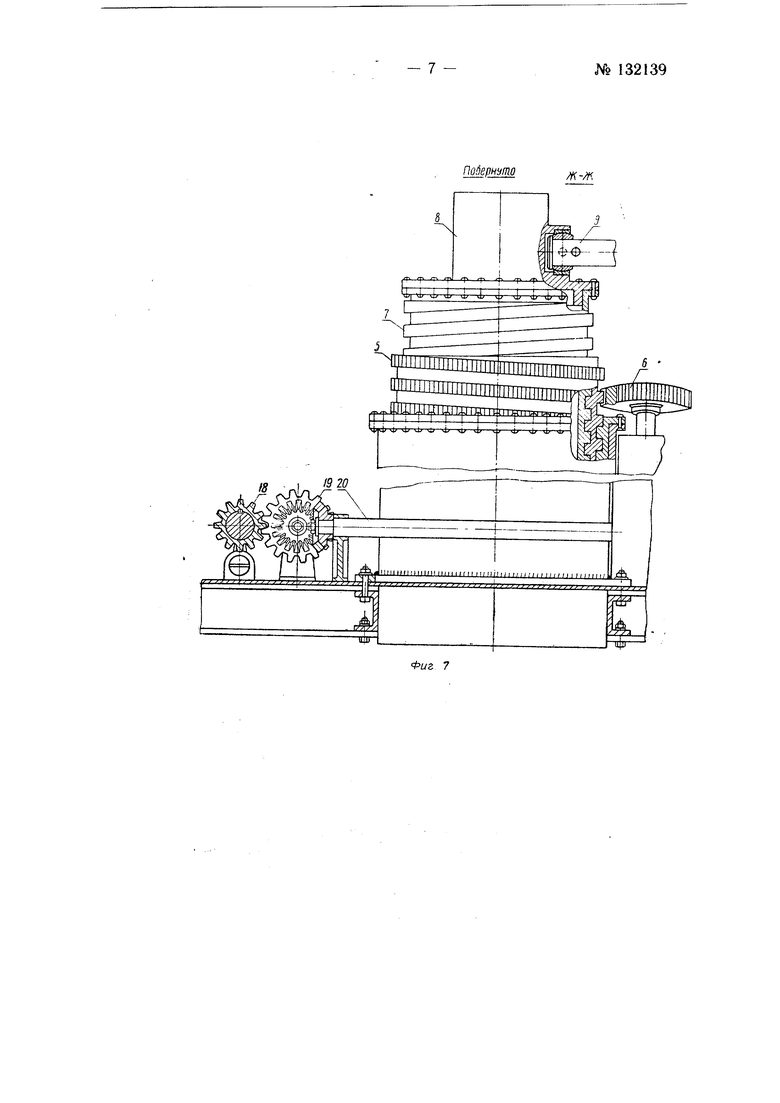
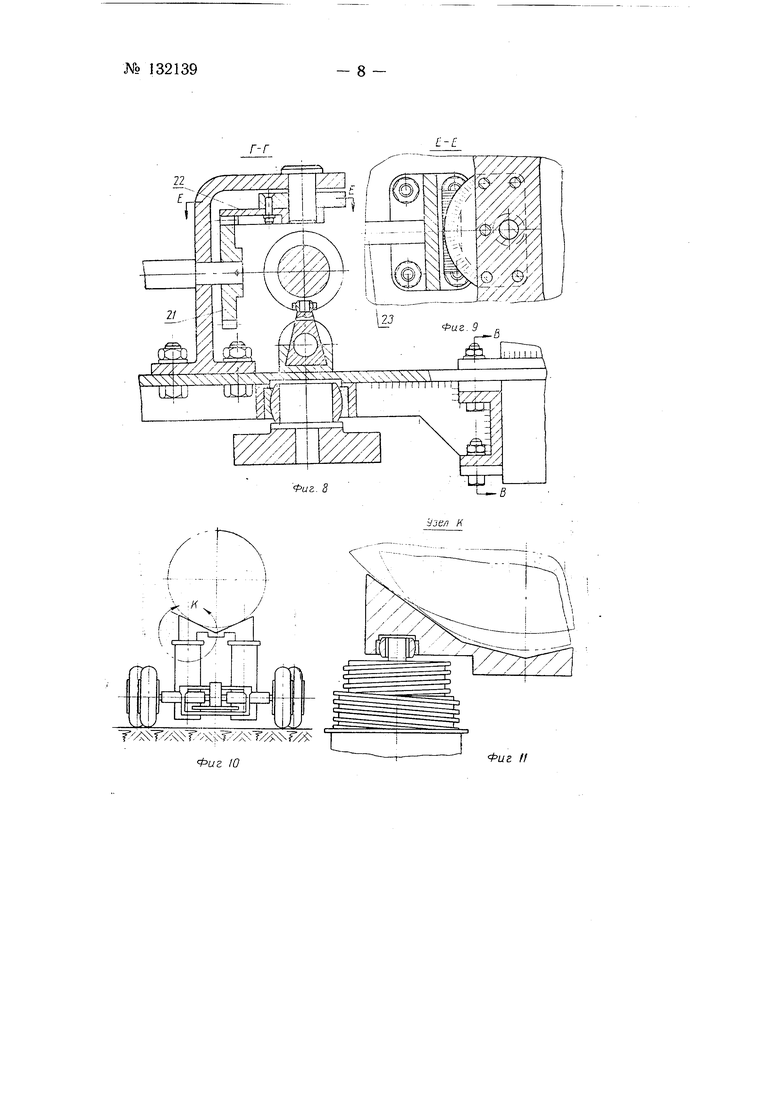
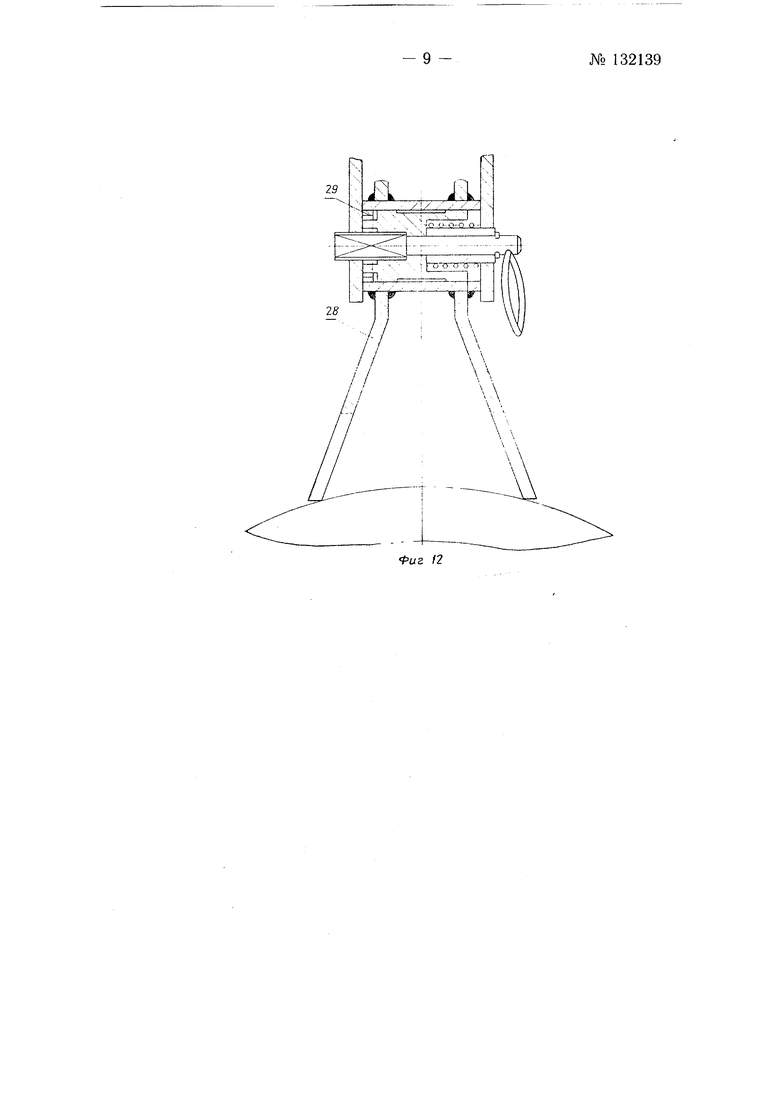
На фиг. 1 изображен подъемник с двумя домкратами, вид сбоку: на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид спереди, когда он подведен с грузом под самолет; на фиг. 4 - разрез по А-А на фиг. 2; на фиг. 5 - разрез по Б-Б на фиг. 2; на фиг. 6 - разрез по В-В на фиг. 2; на фиг. 7 - разрез но Ж-Ж на фиг. 2; на фиг. 8 - разрез по ГГ на фиг. 2; на фиг. 9 - разрез по Е-Е на фиг. 8; на фнг. 10 -- вид сзади подъемника с четырьмя домкратами; на фиг. 11 - узе,п К, .и. фиг. 10 - соединение внутреннего винта домкрата с ложементом; на фиг. 12 - приспособление для удержания грузоподъемного замк& з вертикальном положении при подъеме груза.
На раме / подъемника укреплены два винтовых двухступенчатых домкрата 2, которыми подымается груз- для подвешивания к самолету 4.
№ 132139
Винт 5 первой ступени домкрата 2 вращается непосредственно шестерней 6, связанной с двигателем, для чего винт 5 снабжен зубцами, входящими в зацепление с шестерней 6. Верхняя часть винта 5 представляет собой гайку, внутри которой вращается винт 7 второй ступени домкрата 2.
На верхней части винтов 7 закреплены ложементы 8 для груза 3. Ложементы 8 обоих домкратов 2 соединены между собой продольными тягами Я концы которых помещены в щарнирах на ложементах 8, причем один коиец тяги 9 закреплен, в щарнире неподвижно, а другой ее конец может перемещаться вдоль оси втулки шарнира.
Рама / подъемника закреплена на осях авиаколес высокого давления следующим образом; на передней оси W установлены на подшипниках две неподвижных втулки 11, на которых подвешен при помощи роликов 12 передний кронштейн 13 рамы, имеющий посредине шарнирный подшипник, расположенный на вертикальной оси и являющийся передней точкой крепления рамы /. Задняя ось 14 колес также имеет две втулки /Л на которых при помощи роликов /2 подвешена рама /. Таким образом, рама ) закреплена на двух колесных осях 10 а 14 в трех точках; в одной точке посредине передней оси /f и в двух точках па задней оси М.
Такая подвеска рамы / дает возможность поступательного перемещения ее вдоль осей колес путем перекатывания по втулкам 11 роликов 12 и вращательного движения в горизонтальной плоскости относительно точки крепления рамы / на передней оси 10. Перемещения эти осуществляются посредством следующих механизмов; на раме 1 под осями 10 и 14 установлены ходовые винты 15, вращение которых производится от двигателя подъемника. На осях 10 и 14 имеются фланцы 16, на которые при вращении винтов 15 опираются опорные подшипники неподвижно установленных кронщтейнов 17, вследствие чего вращение винтов 15 вызывает перемещение рамы / вдоль осей колес подъемника.
На задней оси 14 рамы установлена длинная втулка 18, наружная поверхность которой выполнена в виде цилиндрической шестерни, находящейся в зацеплении с щестерней 19 ходового вала 20 двигателя подъемника.
Передняя ось 10 рамы выполнена поворотной при помощи шестерни 21, находящейся в зацеплении с зубчатым сектором 22 кронштейна передней оси 10 и соединенной поворотным валом 23 с рулевым колесом 24.
На площадке рамы / установлено поворотное сиденье 25 водителя, справа от сиденья 25 установлен пульт 26 управления всеми механизмами приемника, приводимыми в движение двигателем с редуктором, установленными на площадке 27 рамы. Редуктор соединен валами и электромуфтами с шестернями 6 домкратов, с ходовыми винтами 5 и с шестерней 19, передающей вращение на заднюю ось 14. Ходовой вал 20, кроме больших скоростей вращения, необходимых для движения подъемника по аэродрому, имеет также пониженную скорость вращения, необходимую для незначительных перемещений механизмов при подъеме грузов на самолет.
Вариант подъемника с шестью степенями свободы груза отличается от описанной выше конструкции тем, что на раме / установлено не два, а четыре домкрата; верхние концы их внутренних винтов 7 соединены с ложементами 8, снабженными шаровыми опорами, через шарнирные подшипники, в которых втулки винтов 7 сидят с зазором, позволяющим производить перемещение ложементов 8 с грузом относительно продольной оси самолета, что сообщает грузу пятую степень свободы (врапхение вокруг продольной оси). Установка на раме / этих добавочных двух домкратов с шарнирными подшипниками на ложементах 8 сообщает грузу также и шестую степень свободы - вращение его относительно поперечной оси самолета (по размаху крыльев).
При подъеме грузов 3 на самолет не за замок, а за корпус груза , замки, за которые подвешивается груз, должны быть установлены на самолете, а не на грузе 3. В противном случае замкн должны иметь приспособление для удерживания их в вертикальном положении при подъеме груза 3. Это приспособление состоит из опорного рычага 28, закрепленного на осп в корпусе замка и опирающегося нижним концом (лапками) в корпус груза 5; от непроизвольного поворота рычаг 28 удерживается зубчатым фиксатором 29 с необходимым количеством фиксированных положений.
Работа подъемника
Когда подъемник с грузом подъехал иод отсек самолета, в который необходимо подиять груз 3, водитель поворачивает свое сиденье 25 вправо на 90° лицом к пульту 26 управления и включает домкраты 2 в работу. Пульт управления может быть выполнен переносным.
Согласно указаниям руководящего погрузкой водитель, вк.иочая соответствующие механизмы, перемещает и поворачивает груз иолч),жение, обеспечивающее стыковку груза с самолетом.
Предмет изо б р е т с и и я
1.Самоходный подъемник для подвозки и подъема спецгруза на самолет, имеющий шесть степеней свободы груза при подъеме и состоящий из смонтированной на двух колесных осях рамы, несущей винтовые или гидравлические домкраты, отличающийся тем, что, с целью сообщения грузу степеней свободы, рама подвещена на осях колес G трех точках и при помощи роликовых подвесок, гаек и ходовых винтов может перемещаться вдоль осей.
2.Подъемник по п. 1, отл и ч а ю щ и и с я тем, что одна из подвесол сочленена с рамой носредством вертикальной оси с шаровым подшипником.
3.Подъемник по п. 1, о т л и ч а ю Hi и и с я тем, что для гтередачи вращения от двигателя тележки на ходовую ось колес, последняя снабжена цилиндрической шестерней с удлиненным зубчатым венцом.
4.Подъемник по п. 1, отличающийся тем, что для сообщения винтам домкрата вращения винтовые выступы одной из ступеней домкрата снабжены зубцами, входящими в зацепление с цилиндрической шестерней привода.
5.В подъемнике по п. 1, применены ложементы для груза, оиираю1циеся на домкраты при помощи шаровых опор, связанных попарно нро дольными тягами с шарнирным сочленением и свободным неремещением одного конца тяг относительно шарнира.
- 3№ 132139
Gnettspya
.l
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТА ТИПА Ми-8 ТРЕЙЛЕРОМ И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТА ТИПА Ми-8 ПРИ ТРАНСПОРТИРОВКЕ ЕГО ТРЕЙЛЕРОМ | 2007 |
|
RU2347711C2 |
| СИСТЕМА ЗАГРУЗКИ ИЗДЕЛИЯ | 2021 |
|
RU2810150C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| УСТРОЙСТВО ДЛЯ ЭВАКУАЦИИ САМОЛЕТОВ | 2017 |
|
RU2714337C2 |
| МОТОБЛОК И КОМПОНОВОЧНЫЙ МОДУЛЬ | 2000 |
|
RU2173038C1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| АЭРОМОБИЛЬНЫЙ ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС | 1992 |
|
RU2047552C1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
26
16 17 15
Риг 4
12 I/
1
3L
а:
tttfr
I чЧХЧХЧ
777/77 Л
щи
Ttp
t±3:r
V/TTTA
Г-г
Фиг.
Фиг 10
Узк/1 К
Фиг. ft
