Изобретение относится к автоматизации металлообработки и может быть использовано в робототехнологических комплексах для за рузки технологических машин, а также как промежуточный накопитель деталей.
Цель изобретения - расширение технологических возможностей устройства путем использования диска для разных по диаметру деталей без его переналадки.
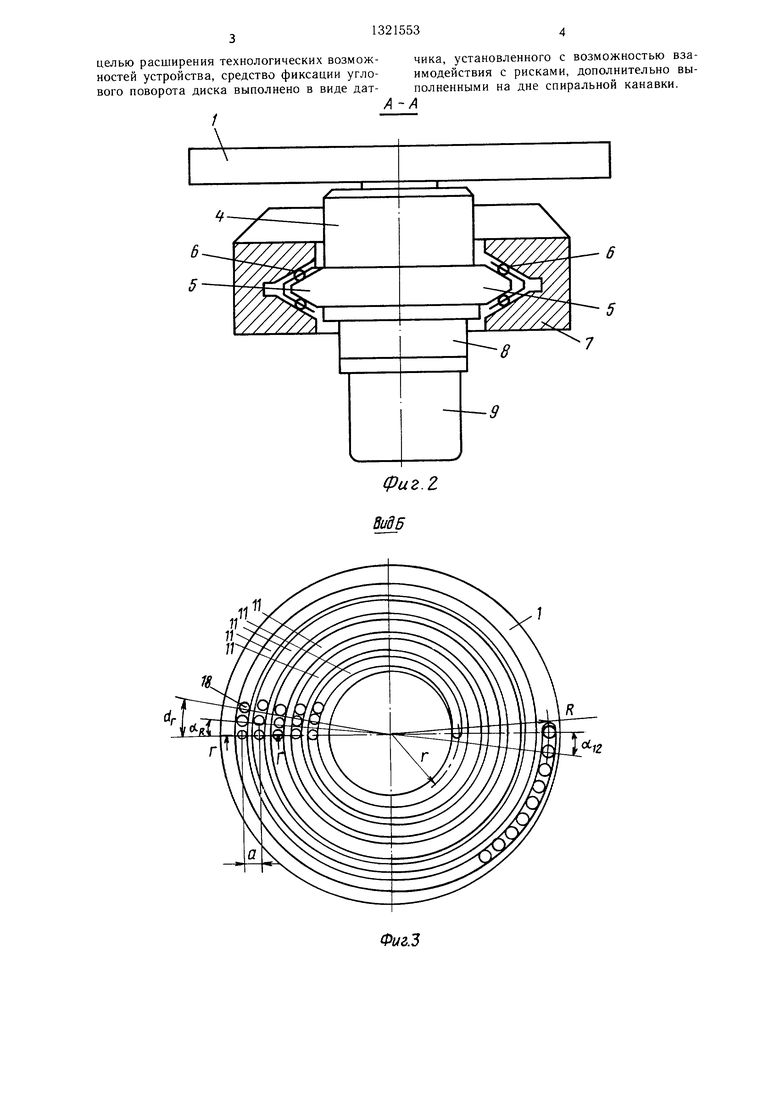
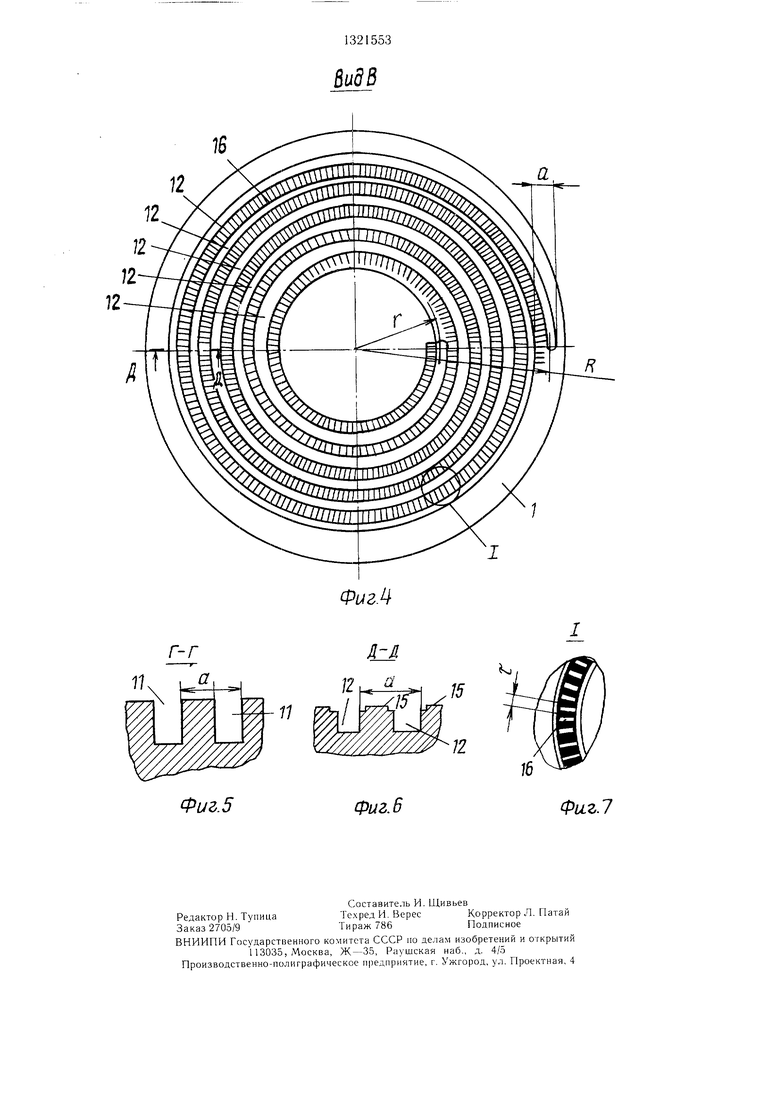
На фиг. изображено загрузочное устройство, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - разрез Д-Д на фиг. 4; на фиг. 7 - узел I на фиг. 4.
Загрузочное устройство состоит из диска 1, установленного своим валом 2 в под- шинпиках 3. Последние установлены в каретке 4, имеющей V -образные направляющие 5. Возможно также применение прямоугольных направляюгцих или направляющих типа «ласточкин хвост и др. Последние через Н1арики 6 взаимодействуют с V-образной (или, соответственно, с П-образной направляющей, или направляющей тина «ласточкин хвост и т.п.) опорной поверхностью основания 7. К нижней части каретки 4 укреплен стакан 8, на котором установлен приводной двигатель 9 (например, типа РД-9 ШД). Вал двигателя через муфту 10 соединен с валом 2.
На верхней плоскости диска 1 выполнен спиральный лоток 11 (фиг. 3 и 4) с шагом спирали, равным а. Вместо спирального лотка могут быть выполнены гнезда, расположенные но спирали, имеющей шаг а с некоторым окружным шагом Г.
На нижней плоскости диска 1 выполнена спиральная канавка 12 (фиг. 5 и 6), взаимо- действую цая своими боковыми поверхностями с роликом 13, установленным на неподвижной оси кронштейна 14 основания 7. Спираль канавки 12 согласована по направлению и шагу со спиралью лотка 11.
На выступающих частях 15 нижней плоскости диска 1 (фиг. 5 и 6) нанесены метки 16 с равномерным окружным шагом 1 т.е. T const. Метки могут быть выполнены в виде зубцов либо светлых и темных рисок, С метками 16 взаимодействует датчик 17 (индуктивный, пневматический или оптический), установленный на основании 7, Датчик связан с системой управления (не показана).
Загрузочное устройство работает следующим образом.
Заготовки 18 (или детали, предназначенные для сборки) загружаются в спиральный лоток 11, и диск 1 приводится во вращение от привода 9. Так как диск 1 взаимодействует с роликом 13, то он перемещается также в V -образных направляющих. За один оборот вала 2 диск также поворачива
0
5
ется на один оборот и одновременно нере- мещается в направлении ролика 13 на один шаг спирали а. При повороте на произвольный угол tp это перемещение составляет величину, равную -, ха. Таким образом, если схват манипулятора (не показан)уста- новить, напри.мер, по центру лотка 11, то это взаимное положение будет постоянно сохраняться при вращении кассеты 1 в силу согласованности шраметров спиралей 11 и 12.
Заготовки 18 устанавливаются с некоторым окружным QiaroM в (наперед заданным). Шаг в должен назначаться из условия в n-t, где п 1,2,3... Величина п отрабатывается системой управления и контролируется датчиком 17. При достаточно малом шаге ч; выполнение этого условия не представляет затруднений (например, при ,5 мм). После взятия (или опускания) очередной детали 18 из лотка 11 включается привод 9 и начинается поворот диска 1. Датчик 17 отслеживает величину окружного шага в расположения деталей путем подсчета числа импульсов п, выдаваемых после каждого поворота диска 1 на угол, обеспечиваюший величину окружного шага t,
После поворота кассеты на п импульсов, выдаваемых датчиком 17, привод 9 останавливается и манипулятор захватывает (или устанавливает) следующую деталь и т.д.
При смене деталей необходимо задать новый шаг поворота диска 1 путе.м задания числа и.мпульсов п, выдаваемых датчиком 17. А так как шаг расположения меток постоянен, т.е. я; const, то и n- i const на любом угле поворота спирали. На фиг. 3 показано расположение деталей 18 в лотке 11. При этом на максимальном радиусе спирали угол, соответствующий шагу расположения деталей 18, равен d, а на минимальном радиусе . При этом .. Однако нанесение меток с Т const позволяет реолить задачу поворота точно на заданный шаг при о;, jt const, при г V-аг.
Формула изобретения
5
Загрузочное устройство, содержащее магазин, выполненный в виде диска с гнездами, расположенными на его торцовой поверхности по спирали, смонтированного с возможностью поворота на каретке, уста0 новленной с возможностью возвратно-поступательного перемещения по направляющим, выполненным на основании, ролик, установленный на направляющих с возможностью взаимодействия с боковыми поверх, ностями спиральной канавки, выполненной на противоположной от гнезд торцовой поверхности диска, и средство фиксации углового поворота диска, связанное с приводом его поворота, отличающееся тем, что, с
0
5
0
целью расширения технологических возможностей устройства, средство фиксации углового поворота диска выполнено в виде дат/
чика, установленного с возможностью взаимодействия с рисками, дополнительно выполненными на дне спиральной канавки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1980 |
|
SU899327A1 |
| Загрузочное устройство | 1985 |
|
SU1281374A1 |
| Линия для спирального оребрения труб лентой | 1978 |
|
SU733760A1 |
| Вибрационное магазинное загрузочное устройство | 1987 |
|
SU1493440A1 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
| Линия для спирального оребрения труб лентой | 1990 |
|
SU1752468A1 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
| Загрузочное устройство | 1986 |
|
SU1346394A2 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Загрузочное устройство | 1982 |
|
SU1024223A2 |
Изобретение относится к автоматизации металлообработки и может быть использовано в робототехнологических комплексах для загрузки технологических машин, а также как промежуточный накопитель деталей. Целью изобретения является расширение технологических возможностей устройства путем использования магазина для разных по размеру деталей без его переналадки. Загрузочное устройство содержит магазин, выполненный в виде диска 1 с гнездами, расположенными на его торцовой поверхности по спирали, установленного с возможностью вращения от электродвигателя 9, расположенного на каретке 4, перемещающейся по направляющим, смонтированным на основании 7. На направляющих закреплен ролик 13, связанный со спиральной канавкой 12 диска 1. На основании 7 смонтирован датчик 17, установленный с возможностью взаимодействия с метками, выполненными на дне спиральной канавки, и дающий команду на отключение электродвигателя 9 при повороте диска на заданный УГОЛ. 7 ил. / /J (О сл со ьо сд СП со Фиг.1
фиг.г
Мб
,
11
Фг/г.5
Вид В
I
Фиг.
JLJ
I
15
Фиг.5
фиг. 6
Фаг. 7
| Загрузочное устройство | 1985 |
|
SU1281374A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
