Изобретение относится к машиностроению и может быть использовано для балансировки различных роторов.
Цель изобретения - расширение технологических возможностей автоматической линии для балансировки роторов за счет обеспечения возможности балансировки роторов в двух плоскостях коррекции.
На фиг.1 представлена схема авто- fO ся верхняя опора 15, ротор 3 раскру
матической линии для балансировки роторов; на фиг.2 - сечение А-А на фиг.1 о
Автоматическая линия для балансировки роторов содержит основание 1, размещенный на нем поворотньй манипу лятор 2 с рабочими органами (не показаны), предназначенными для .захвата и периодического перемещения балансируемых роторов 3 по окружности. Бок- руг манипулятора по окружности последовательно размещены на основании позиция 4 измерения дисбаланса ротора, позиция 5 ориентирования ротора, предназначенная для его установки в за- данное положение, позиция 6 корректировки дисбаланса, включающая две металлорежущие головки 7 для коррекции дисбаланса. Имеются также вторая позиция 8 ориентирования, дополнительная позиция 9 корректировки, позиция 10 контроля, позиция 11 сортировки и позиция 12 загрузки-выгрузки.
Автоматическая линия содерж ит также транспортер 13, предназначенньй для загрузки роторов 3, подлежащих балансировке и отбалансированных, а также накопитель 14 бракованных ро-- торов.
Позиция 4 измерения дисбаланса и позиция 10 контроля включают в себя виброизмерител-ьные опоры 15 и привод 16 их взаимного перемещения, а также привод 17 вращения ротора.
Виброизмерительные опоры 15, а также механизмы центрирования остальных позиций автоматической линии и рабочие органы манипулятора 2 выпол- .нены таким образом, чтобы центрирование балансируемого ротора 3 осуществлялось при вертикальном положении .его оси вращения.
Автоматическая линия для балансировки роторов работает следующим образом.
Ротор 3, подлежа111 1й балансировке и установленный в транспортную ячейку транспортера 1.3 в вертикальном положении, поступает на позицию 12 заг
pysKHj где захватывается рабочим органом манипулятора 2, переносится на позицию 4 измерения балансировки и вставляется в центрирующую виброиз- меритульнуто опору 15 и привод 17, после чего рабочие органы манипулятора 2 переходят в нейтральное положение. Вслед за этим движением приводом 16 в рабочее положение устанавливаетчивается и производится измерение дисбаланса, после чего опора 15 отводится вверх и начинается второй такт балансировки.
На втором такте балансировки ротор 3 переносится на позицию 5 ориентирования, а на позицию 4 измерения дисбаланса поступает следующий ротор 3. На позиции 5 ориентирования ротор 3 устанавливается в положение, необходимое для коррекции дисбаланса в первой плоскости коррекции.
При следующем такте балансировки ротор 3 переносится на позицию 6 корректировки дисбаланса, где осещуств- ляется фиксирование ротора и коррекция дисбаланса двумя металлорежущими головками 7 по командам системы упра30
15 20 25
осуществляет разложение измеренного дисбаланса по двум направлениям, соответствующим местам съема металла.
В последуюш 5Х двух тактах осуществляется ориентирование ротора на пози35 ции 8 для коррекции дисбаланса во второй плоскости и коррекция дисбаланса на позиции 9 ,
На позиции 10 осуществляется измерение дисбаланса, аналогичное измере40 ниш на позиции 4, и ротор переносится на позицию 11 сортировки, где устанавливается на накопитель 14. Если ротор 3 признан бракованным, то накопитель 14 перемещается на один шаг,
45 в противном случае в следующем такте балансировки ротор 3 переносится на позицию 12 загрузки-выгрузки.
Если ротор 3 признан отбалансированным, то транспортер 13 перемещает50 ся на один щаг, в противном случае ротор вновь поступает на следующий цикл балансировки„ Одновременно на автоматической линии балансируется со смещением на один такт семь рото55 ров.
Формула изобретения II
1. Автоматическая линия для балансировки роторов, содержащая основа-
3132
ние, размещенные на нем поворотный манипулятор с рабочими органами, предназначенными для захвата и периодического перемещения балансируемых роторов по окружности, расположенные по окружности вокруг манипулятора позицию измерения, BKJfno4aio4yK) виброизмерительные опоры, позицию корректировки, включающую узел коррекции дисбаланса, позиции контроля, сортиров- ки, загрузки и выгрузки, включающие каждый механизм центрирования, отличающая с я тем, что, с целью расширения технологических возможностей, она снабжена дополнитель- ной позицией корректировки, установленной у позиции контроля, и двумя позициями ориентирования, первая из
которых расположена между позицией измерения дисбаланса и основной позицией корректировки, а вторая - между позициями корректировки, каждая из которых вьшолнена в виде двух металлорежущих головок с приводами, размещенных под фиксированным углом друг к другу,
2.Линия ПОП.1, отличающаяся тем, что оси рабочих органов манипулятора, виброизмерительных опор и механизмов центрирования перпендикулярны основанию.
3.Линия по ПП.1 и 2,отличающаяся тем, что позиция выгрузки совмещена с позицией загрузки.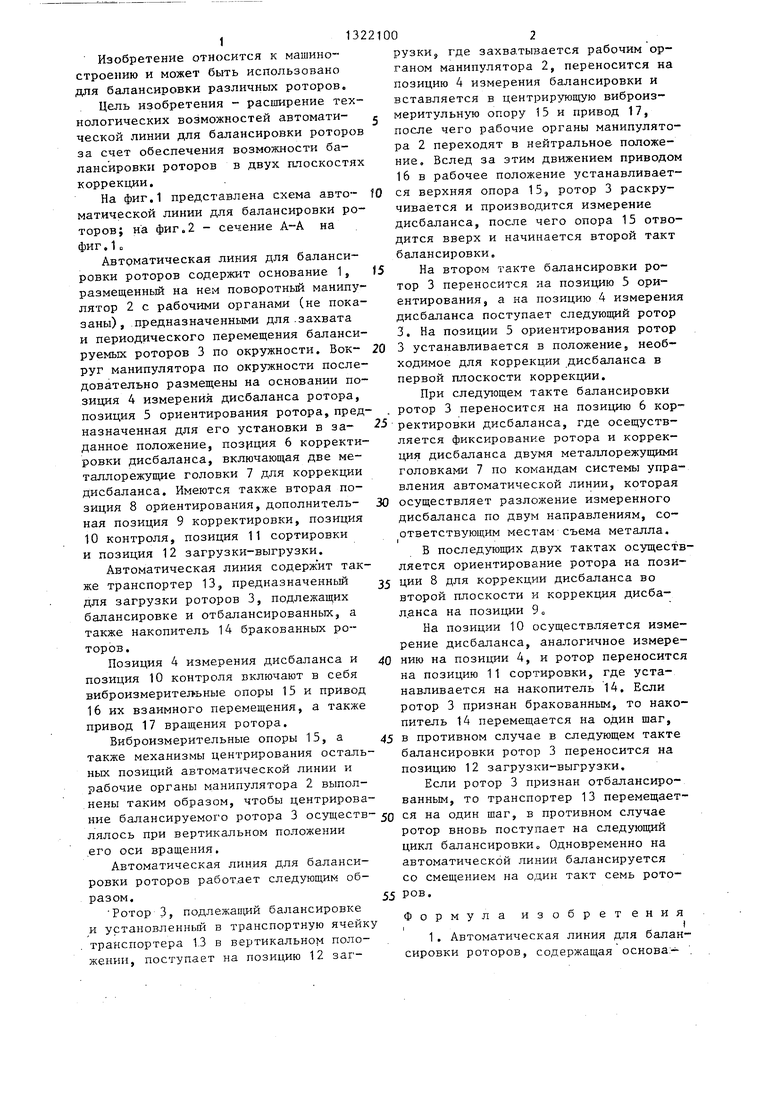
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Автоматизированная линия для балансировки роторов электродвигателей | 1984 |
|
SU1226088A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| Автоматическая линия для балансировки коленчатых валов | 1983 |
|
SU1132157A2 |
| Устройство для корректировки масс роторов электродвигателей | 1986 |
|
SU1330479A1 |
| Автоматический балансировочныйСТАНОК | 1979 |
|
SU808891A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
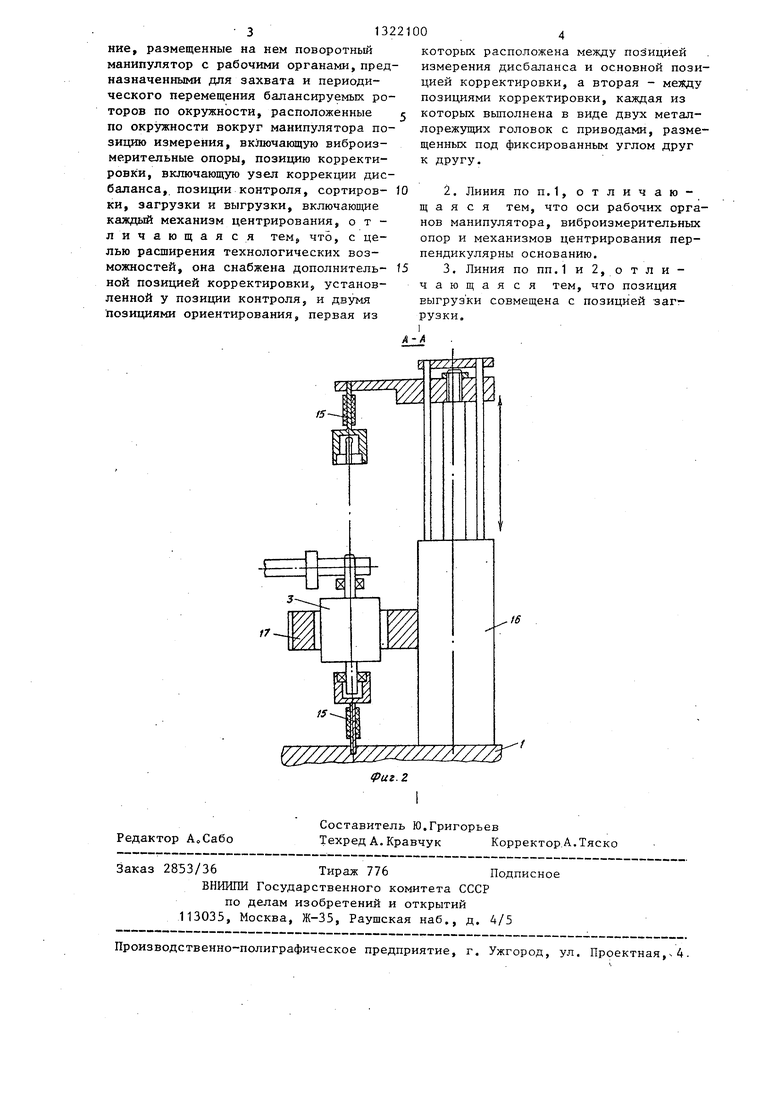
Изобретение может быть использо вано для автоматической балансировки роторов в серийном производстве. Целью изобретения является расширение технологических возможностей автоматической линии, уменьшение габаритов 7 /0000000000 QQ Q00 QQQoo и упрощение конструкции за счет обеспечения возможности балансировки в двух плоскостях коррекции. Особенностью автоматической линии является наличие дополнительной позиции 9 коррекции дисбаланса и двух позиций 5 и 8 ориентирования ротора, обеспечивающих возможность балансировки роторов в двух плоскостях коррекции, а также выполнение корректирующего механизма в виде двух металлорежущих головок 7 с независимыми приводами, что позволяет производить устранение дисбаланса в двух заданных направлениях. Процесс балансировки организован при вертикальном положении оси вращения ротора. 2 з.п. ф-лы, 2 ип. с $ О) to ю
Редактор
Составитель Ю.Григорьев
Техред А. Кравчук Корректор.А.Тяско
Заказ 2853/36Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4.
| Проспект фирмы Гофман, ФРГ, № 230.100.0, с.23 (линия AWS-E4). |
