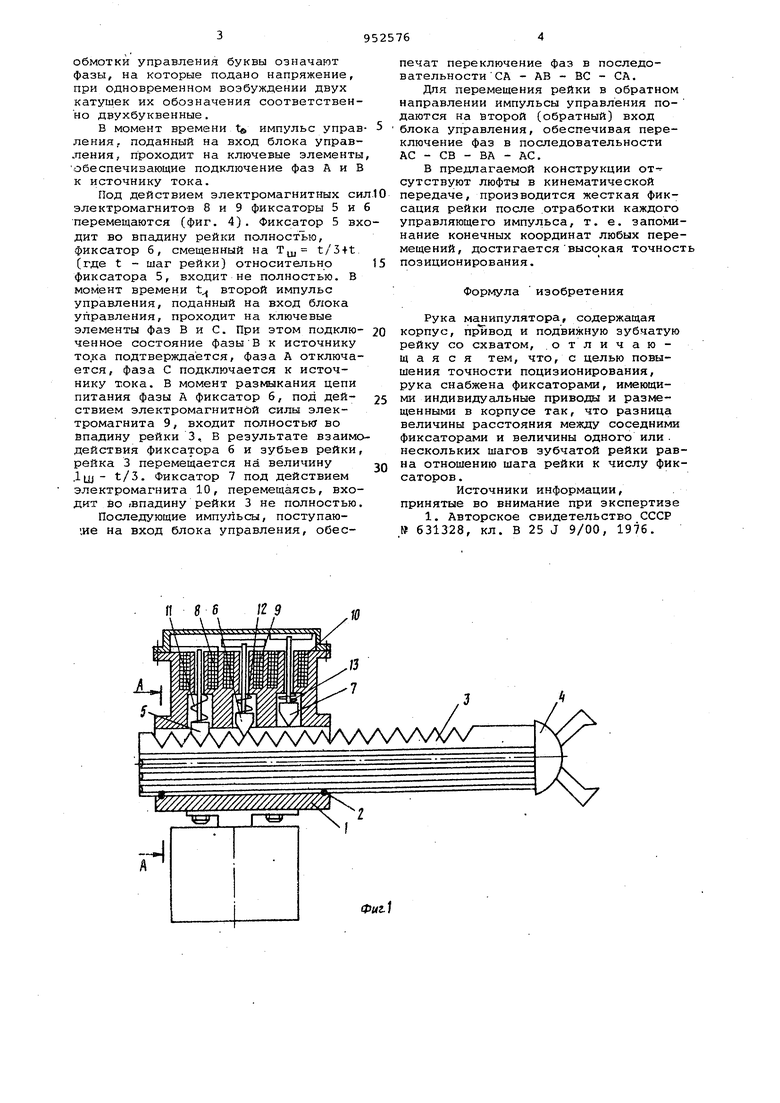
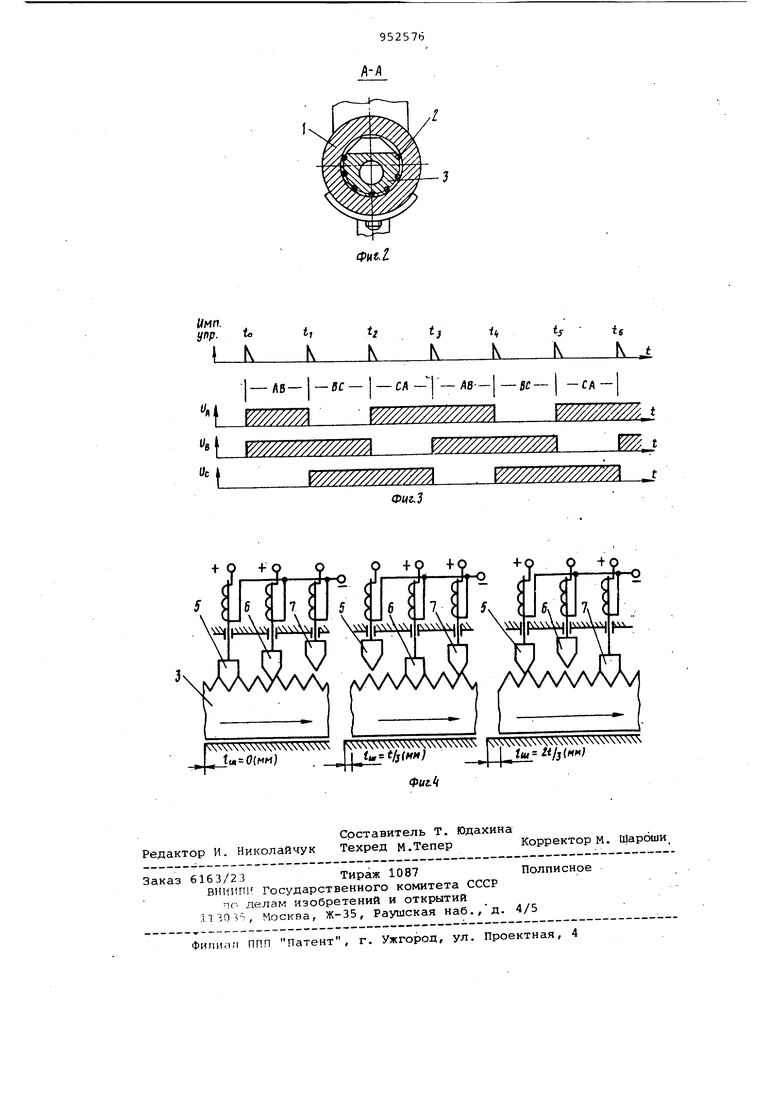
Изобретение относится к машиностроению и может быть использовано при создании манипуляторов и промышленных роботов. Известна рука манипулятора, содержащая корпус, привод и подвижную зубчатую рейку со схватом CljНедостаток известного технического решения заключается в низкой точности позиционирования и сложности конструкции. Цель изобретения - повышение точности позиционирования и упрощение конструкции. Эта .цель достигается тем, что рука снабжена фиксаторами, имеющими индивидуальные приводы и размещенными в корпусе так, что разница вели чины расстояния между соседними фиксаторами и величины одного или нескольких шагов зубчатой рейки равны отношению шага рейки к числу фиксаторов . ,На фиг. 1 показана рука манипулятора j на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - временные диагра мы напряже.ний/ на фиг. 4 - циклограмма отработки рукой манипулятора импульсов управления в прямом направ лении. Рука манипулятора (фиг. 1 содержит несущий корпус 1, внутри которого в шариковых направляющих 2 установлена зубчатая рейкаКфиг. 2) . На переднем конце рейки закреплен схват 4. В несущем корпусе 1 последоват льно вдоль зубчатой рейки 3 установлены фиксаторы 5 - 7, форма убьев фиксаторов соответствует форме впадин рейки 3. Расстояние между вершинг1ми фиксаторов. 5 - 7 (шаг фиксаторовj. t/n t k. где t - шаг зубчатого венца рейки,мм п - число фиксаторов; k - масштабный козффициент k j 5 it (i 0,1,2,3,...). Фиксаторы получают усилие от индивидуальных приводов, выполненных в виде кольцевых злектромагнитов 8-10. Пружины 11 - 13 удерживают фиксаторы 5 - 7 в верхнем крайнем положении. Катушки электромагнитов 8-10 образуют трехфазную систему обмотки управления с выведенной общей точкой, которая соединена с отрицательным полюсом источника постоян ного тока. На временных диаграммах напряжений (заштрихованные зоны ) на фазах Обмотки управления буквы означают фазы, на которые подано напряжение, при одновременном возбуждении двух катушек их обозначения соответствен но двухбуквенные. В момент времени t импульс упра ления, поданный на вход блока управ ления, проходит на ключевые элементы обеспечивающие подключение фаз А и к источнику тока. Под действием электромагнитных си электромагнитов 8 и 9 фиксаторы 5 и перемещаются (фиг. 4). Фиксатор 5 вх дит во впадину рейки полностЪю, фиксатор б, смещенный на Тщ t/3-ft (где t - шаг рейки) относительно фиксатора 5, входит не полностью. В момент времени t второй импульс управления, поданный на вход блока управления, проходит на ключевые элементы фаз В и С. При этом подключенное состояние фазыВ к источнику тока подтверждается, фаза А отключается, фаза С подключается к источнику т,ока. В момент размыкания цепи питания фазы А фиксатор 6, под действием электромагнитной силы электромагнита 9, входит полностью во впадину рейки 3.. В результате взаимо действия фиксатора б и зубьев рейки, рейка 3 перемещается на величину 1|D t/3. Фиксатор 7 под действием электромагнита 10, перемещаясь, входит во гвпадину рейки 3 не полностью. Последующие импульсы, поступающие на вход блока управления, обеспечат переключение фаз в последовательности СА - АН - ВС - СА. Дпя перемещения рейки в обратном направлении импульсы управления подаются на второй (обратный) вход блока управления, обеспечивая переключение фаз в последовательности АС - СВ - ВА - АС. В предлагаемой конструкции отсутствуют люфты в кинематической передаче, производится жесткая фиксация рейки после отработки каждого управляющего импульса, т. е. запоминание конечных координат любых перемещений, достигаетсявысокая точность позиционирования. Формула изобретения Рука манипулятора, содержащая корпус, и подвижную зубчатую рейку со схватом, .отличающаяся тем, что, с целью повышения точности поцизионирования, рука снабжена фиксаторами, имеющими индивидуальные приводы и размещенными в корпусе так, что разница величины расстояния между соседними фиксаторами и величины одного или . нескольких шагов зубчатой рейки равна отношению шага рейки к числу фиксаторов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 631328, кл. В 25 J 9/00, 1976.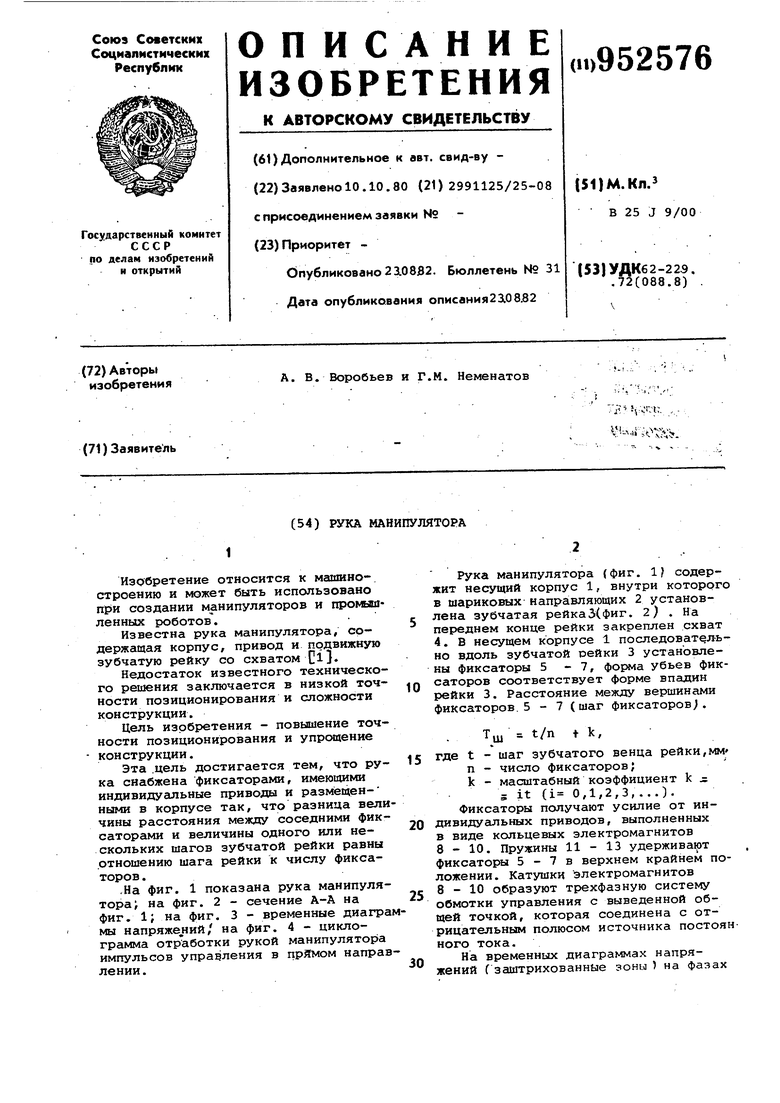
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Система установки и пайки радиоэлементов на печатной плате | 1989 |
|
SU1682067A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
П 8 S IZ 9
..
Фиг.
