о:
Од СХ)
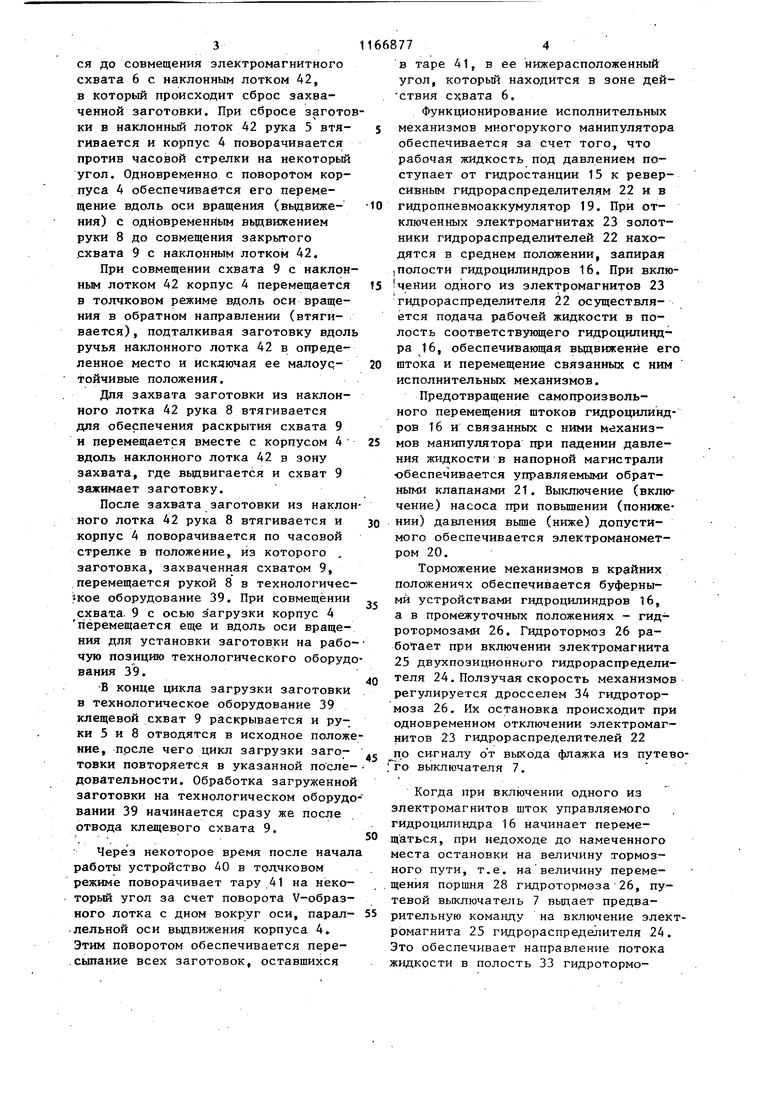
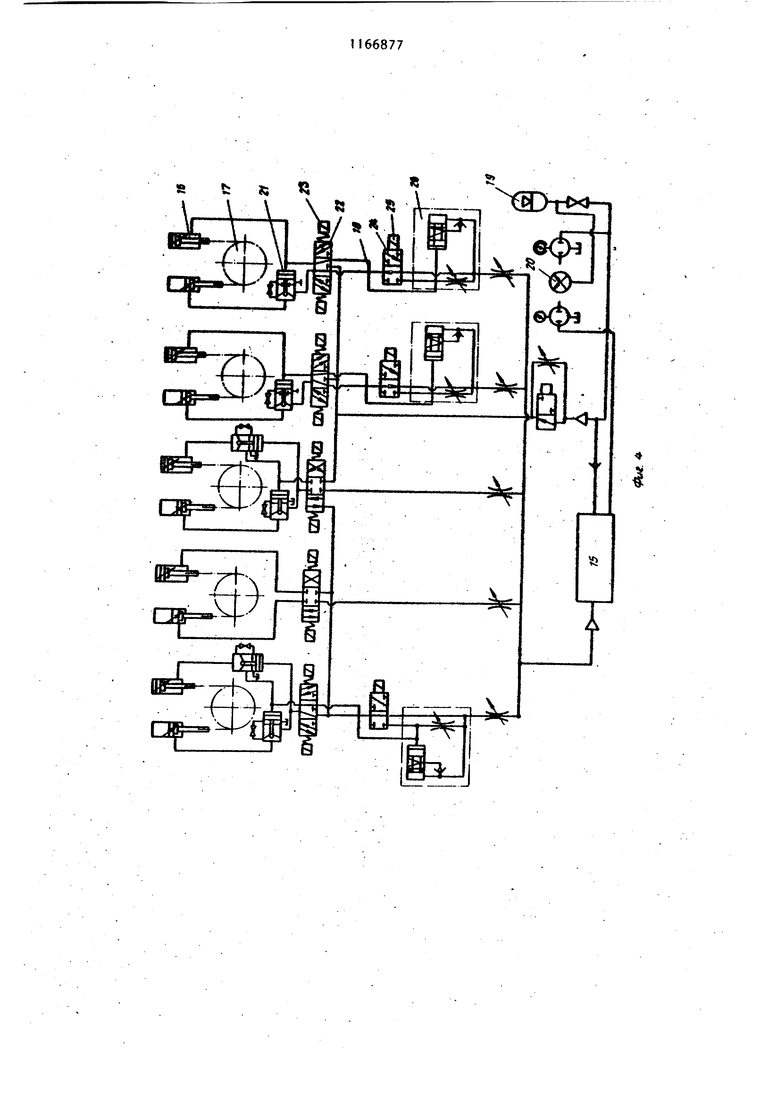
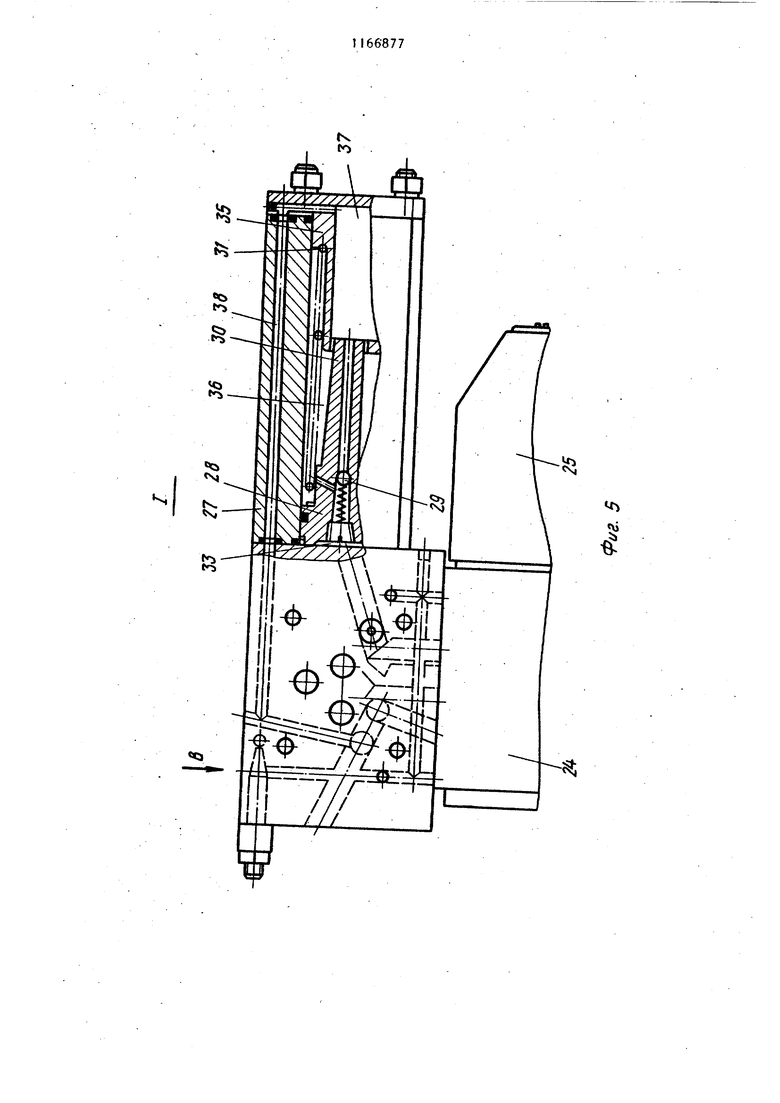
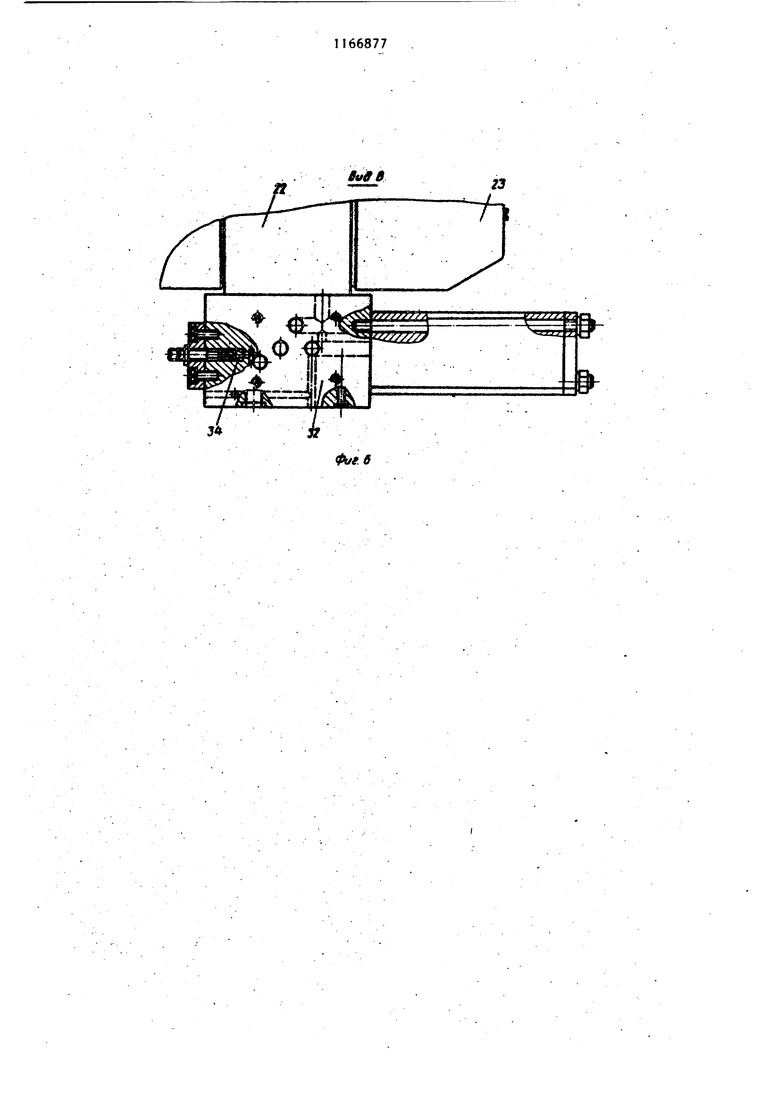
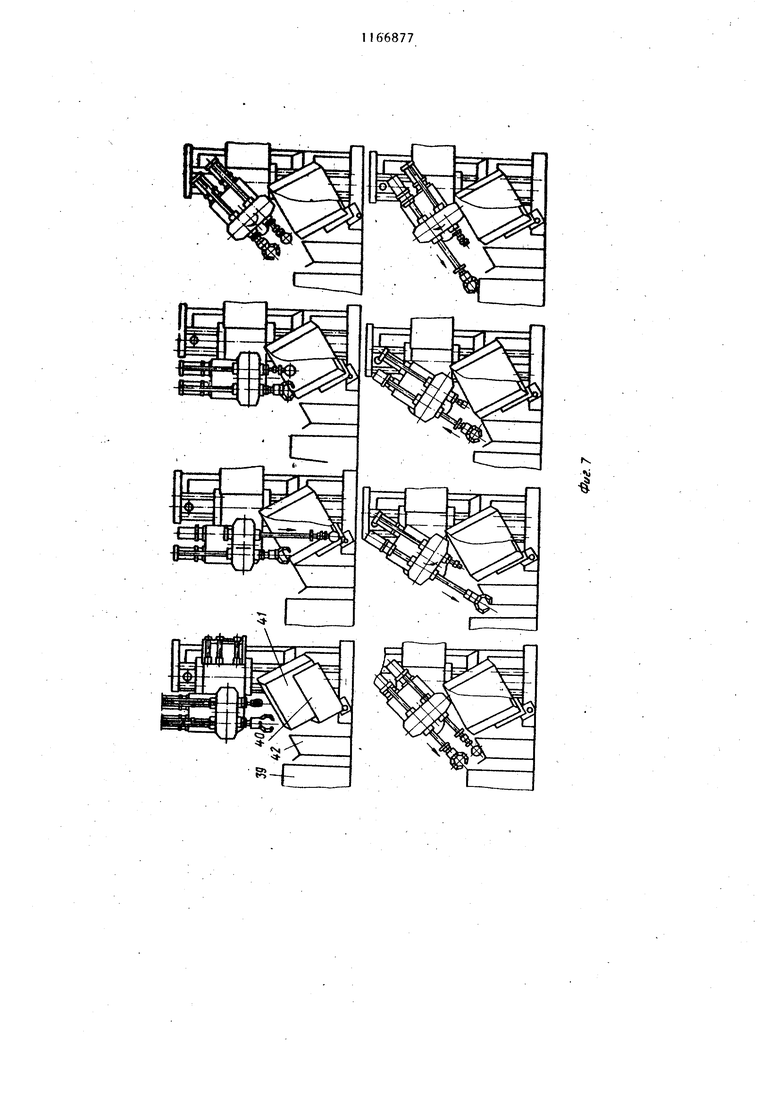
Изобретение относится к вспомогательпому оборудованию кузнечно-штам повочного производства, а именно к манипуляторам, обслуживающим машины с горизонтальной осью обработки типа радиально-ковочных и др. Цель изобретения - повьппение точ ности пози1щонирования. На фиг, 1 изображен манипулятор, общий вид; . на: фиг,- 2 - вид А на фиг. 1; на фиг. 3 - вид Б на .фиг. 2 на фиг. 4 .- гидросистема манипулятора; на фиг. 5 узел I на фиг. 2; на фиг. 6 - вид В на фиг. 5; на фиг. 7 - взаимное расположение мани пулятора и его элементов относитель но тары и оборудования. Манипулятор содержит станину 1 с вертикальными направляющими 2, на которых установлена с возможностью подъема (опускания) каретка 3, связанная с корпусом 4, который закрепле на йей с возможностью вращения вокру горизонтальной оси его вьщвижения (втягивания). В корпусе 4 смонтированы рука 5, снабженная электромагнитным схватом 6 и путевым выключателем 7, и рука 8 снабженная клещевым схватом 9. Каретка 3 снабжена вилкой 10, охватывающей направляющую 11, закрепленную вертикально на станине 1. На вилке 10 установлен флажок 12 бескон тактного выключателя 13. Со стороны крепления направляющей 11 на станине 1 смонтированы электро шкаф 14 и гидростанция 15, связанная с гидроцилиндрами 16. Штоки гидроцилиндров 16 связаны цепными передачами 17 с исполнительными механизмами Гидростанция 15 связана с гидроцилиндрами 16, сообщенными между собой гидролиниями 18, гидропневмоаккумулятором 19, электроконтактным манометром 20, управляющими обратными клапанами 21, реверсивными гидрораспределителями 22 с электромагнитами 23, двухпозиционными гидрораспределителями 24 с электромагнитами 25 и гидротормозами 26. . Гидротормоз 26 состоит из корпуса 27, поршня 28 с обратным клапаном 29 и с дроссельной иглой 30, который поджат пружиной 31 к панели 32 с образованием полости 33, соединенной со сливом при помощи дросселя 34 и с одним из выходов гидрораспределителя 24, второй выход которого соединен со сливом. Соосно с поршнем 28 расположен упор 35, который совместно с поршнем 28 и корпусом 27 образует запоршневое пространство 36 и у которого полость 37 посредством канала 38 соединена с панелью 32. Корпус 4 многорукого манипулятора расположен со стороны обслуживаемого технологического оборудования 39, смонтированного параллельно оси .его горизонтального вьщвижения (втягивания) . На пути вьщвижения схватов многорукий манипулятор снабжен устройством 40 для фиксации тары 41 в наклонном положении, при котором один из ее углов находится ниже остальных в зоне действия схвата 6. Устройство 40 выполнено в виде V-образного лотка с дном, закрепленным на валу механизма (не показан) его фиксированного поворота вокруг оси, параллельной оси вьщвижения корпуса 4. Со стороны обслуживания технологического оборудования 39 многорукий манипулятор снабжен наклонным лот« ком 42, ручей которого расположен параллельно технологическому оборудованию 39 вдоль оси вьщвижения корпуса 4. Работа многорукого манипулятора в зависимости от типа обслуживаемого оборудования может выполняться по различным -программам с периодическим или непрерывным участием оператора. Одна из возможных программ работы обеспечивается в следующей последовательности. Оператор настраивает манипулятор на необходимый режим работы и с использованием цеховых средств механизации устанавливает на устройство 40 транспортную тару 41, заполненную заготовками, подлежащими обработке. При включении по заданной программе происходит опускание каретки 3 с вьщвижением руки 5. В момент сближения электромагнитного схвата 6 с заготовками, расположенными в таре 41, обеспечивается захват одной заготовки и вьщача сигнала на возврат каретки 3 и руки 5 в исходное положение. После возврата каретки 3 и руки 5 в исходное положение корпус 4 поворачивается по часовой стрелке на некоторый угол и рука 5 вьщвигает3ся до совмещения электромагнитного схвата 6 с наклонным лотком 42, в который происходит сброс захваченной заготовки. При сбросе загото ки в наклонньш лоток 42 рука 5 втягивается и корпус А поворачивается против часовой стрелки на некоторый угол. Одновременно с поворотом корпуса 4 обеспечивается его перемещение вдоль оси вращения (вьщвижения) с одновременным вьщвижением руки 8 до совмещения закрытого схвата 9 с наклонным лотком 42. При совмещении схвата 9 с наклон ным лотком 42 корпус 4 перемещается в толчковом режиме вдоль оси вращения в обратном направлении (втягивается) , подталкивая заготовку вдол ручья наклонного лотка 42 в определенное место и исключая ее малоустойчивые положения. Для захвата заготовки из наклонного лотка 42 рука 8 втягивается для обеспечения раскрытия схвата 9 и перемещается вместе с корпусом 4 вдоль наклонного лотка 42 в зону захвата, где выдвигается и схват 9 зажимает заготовку. После захвата заготовки из накло ного лотка 42 рука 8 втягивается и корпус 4 поворачивается по часовой стрелке в положение, из которого , заготовка, захваченная схватом 9, перемещается рукой 8 в технологичес 5кое оборудование 39. При совмещении схвата. 9 с осью загрузки корпус 4 перемещается еще и вдоль оси вращения для установки заготовки на рабо чую позицию технологического оборуд вания 39. В конце цикла загрузки заготовки в технологическое оборудование 39 клещевой схват 9 раскрывается и руки 5 и 8 отводятся в исходное полож ние, после чего цикл загрузки заготонки повторяется в указанной после довательности. Обработка загруженно заготовки на технологическом оборуд вании 39 начинается сразу же после отвода клещевого схвата 9. Через некоторое время после начал работы устройство 40 в толчковом режиме поворачивает тару 41 на некоторый угол за счет поворота V-образ ного лотка с дном вокруг оси, парал лельной оси вьщвижения корпуса 4 Этим поворотом обеспечивается пере.сыпание всех заготовок, оставшихся 774 в таре 41, в ее нижерасположенный угол, которьв находится в зоне действия схвата 6. Функционирование исполнительных механизмов многорукого манипулятора обеспечивается за счет того, что рабочая жидкость под давлением поступает от гидростанции 15 к реверсивным гидрораспределителям 22 и в гидропневмоаккумулятор 19. При отключенных электромагнитах 23 золотники гидрораспределителей 22 находятся в среднем положении, запирая I полости гидроцилиндров 16. При вклю чении одного из электромагнитов 23 гидрораспределителя 22 осуществляется подача рабочей жидкости в полость соответствующего гидроцилиндра 16, обеспечивающая выдвижение его штока и перемещение связанных с ним исполнительных механизмов. Предотвращение самопроизвольного перемещения штоков гидроцилиндров 16 и связанных с ними мвханизмов манипулятора при падении давления жидкости в напорной магистрали обеспечивается управляемыми обратными клапанами 21. Выключение (включение) насоса при повышении (понижении) давления вьше (ниже) допустимого обеспечивается электроманометром 20. Торможение механизмов в крайних положениях обеспечивается буфернымй устройствами гидроцилиндров 16, а в промежуточных положениях - гидротормозами 26. Гидротормоз 26 работает при включении электромагнита 25 двухпозиционного гидрораспределителя 24. Ползучая скорость механизмов регулируется дросселем 34 гидротормоза 26. Их остановка происходит при одновременном отключении электромагнитов 23 гидрораспределйтелей 22 по сигналу от выхода флажка из путевого выключателя 7. Когда при включении одного из электромагнитов шток управляемого гидроцилиндра 16 начинает перемещаться, при недоходе до намеченного места остановки на величину тормозного пути, т.е. на величину перемещения поршня 28 гидротормоза26, путевой выключатель 7 выдает предварительную команду на включение электромагнита 25 гидрораспределителя 24. Это обеспечивает направление потока идкости в полость 33 гидротормоза 26« Поршень начинает перемещение плавно затормаживаясь на своем пути, за счет изменения сечения потока масла, обеспечиваемого дроссельной иглой 30. Одновременно тормозится и.поршень гидроцнпиндра 16, После того, как поршень доходит до .упора 35, дальнейшее медленное движение исполнительного механизма обеспечивается дросселем.
В момент выхода флажка из путевого выключателя поступает сигнал о достижении намеченного места остановки, и устройство электроуправлев
16687-7. 6
ния отключает электромагниты 23 и 25 гвдрораспределителей 22 и 24. Исполнительный механизм останавливается, а поршень 28 гидротормоза 26 возвращается в исходное положение под действием пружины 31, засасывая масло из сливной магистрали через обратный клапан 29 во внутренней полости поршня 28.
Использование предлагаемого изобретения позволяет увеличить производительность манипулятора за счет повьш1ения точности позиционирования.
А/г 7
/4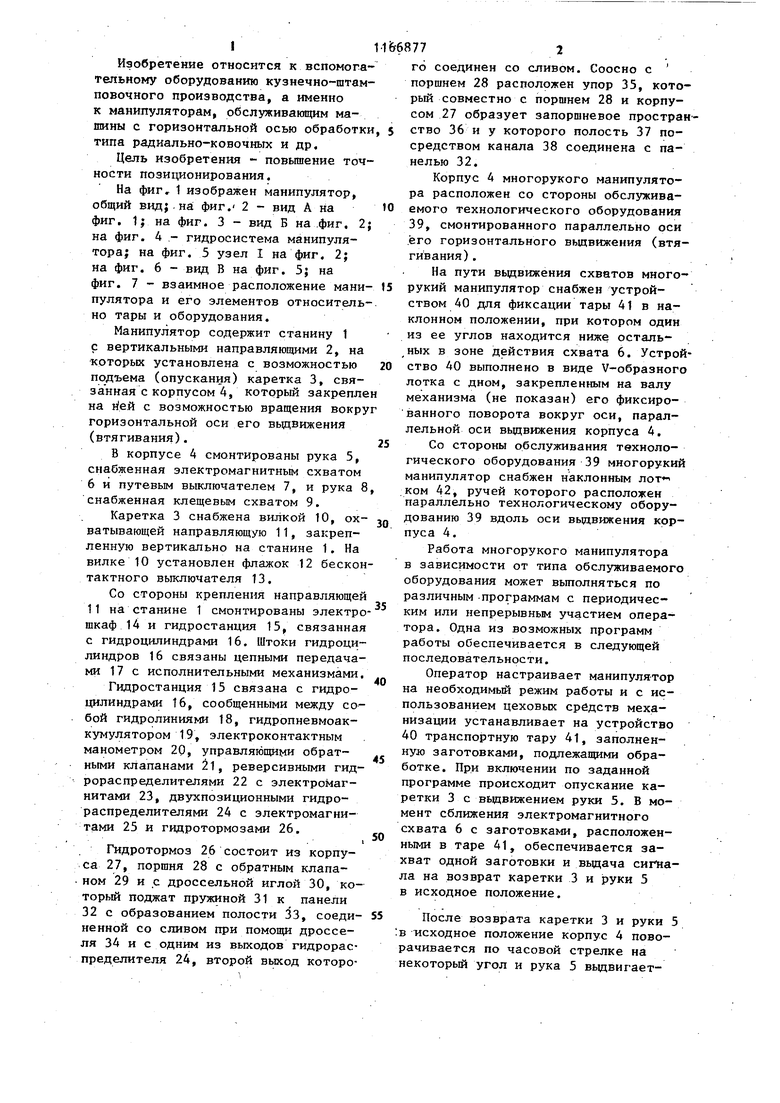
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Манипулятор для перегрузки крупно-гАбАРиТНыХ зАгОТОВОК | 1979 |
|
SU846268A1 |
| Устройство для поштучной выдачи деталей | 1987 |
|
SU1641576A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Манипулятор к бесцентрово-шлифовальному станку | 1989 |
|
SU1824298A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Станок для закалки цилиндрических изделий | 1987 |
|
SU1507812A1 |
| Установка для автоматизированного нагрева заготовок | 1979 |
|
SU871959A1 |
| Питатель токарного многошпиндельного станка | 1985 |
|
SU1323331A1 |

МАНИПУЛЯТОР, содержащий станину с направлякяцей, каретку, установленную на направляющей станины, корпус, смонтированный на каретке с возможностью поворота и перемещения вдоль оси поворота и несущий руки со схватами, каждая из которых кинематически связана с приводом .перемещения в виде гидроцилиндра, соединенного посредством реверсивного гидрораспределителя с питающей магистралью, отличающийся тем, что, с целью повышения точности позиционирования, каждый привод перемещения руки снабжен гидротормозным устройством в виде корпуса с панелью, размещенного в корпусе полого упора, полость которого соединена с панелью, и подпружиненного поршня с дроссельной иглой к обратным клапаном, установленного в корпусе соосно с упором с возможностью взаимодействия с ним и с панелью и образукицего с последней полость, соединенную через дроссель со сливом, и дополнительным (Л управляемым двухпозиционным гидрорасCZ пределителем, сообщающим поршневую полость гидротормозного устройства через реверсивный гидрораспределитель с полостями гидроцйлиндра.
Фиг. 3
fyfB
| Промышленные роботы, каталог НИИМАШ, Mi, 1978, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
