Изобретение относится к машиностроению и может быть использовано в механизмах управления, например в грузозахватных устройствах.
Цель изобретения - повышение КПД механизма за счет уменьшения холостого хода ведущей собачки.
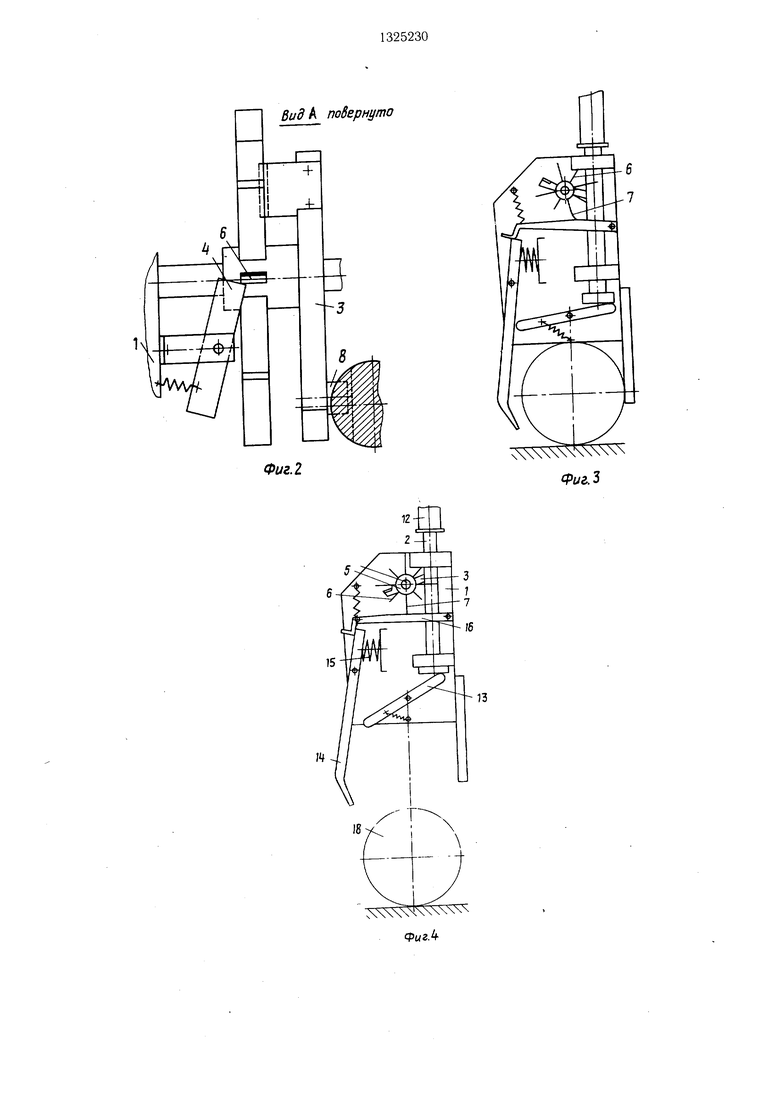
На фиг. 1 представлен храповый механизм, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3-6 - храповой механизм при использовании в грузозахватном устройстве.
Храповой механизм содержит раму 1, привод (не показан), установленный на раме с возможностью возвратно-поступатель- пого перемеп|,ения толкатель 2, взаимодействующие между собой ведущую собачку 3, стопор 4 и храповое колесо 5 с чередую- пцшпся жесткими короткими 6 и упругими длинными 7 зубьями. Ведущая собачка 3 установлена соосно храповому колесу 5 и выполнена в виде двуплечего рычага, одно плечо которого кинематически связано с толкателем 2 посредством закрепленного в рычаге щипа 8, входящего в паз 9 толкателя 2, а другим плечом - с зубьями 6 и 7 храпового колеса 5 посредством выполненных внахлест двух пластин - упругой 10 и жесткой 11, причем длина упругой пластины больше длины жесткой пластины, а ведущая собачка 3 и храповое колесо 5 имеют ось, перпендикулярную оси стопора 4.
Толкатель 2 механизма жестко закреплен на стреле 12 грузозахватного устройства. На раме 1 также смонтированы силовой подпружиненный рычаг 13, взаимодействующий одним плечом с толкателем 2, а другим - с шарнирно закрепленной зажимной губкой 14 грузозахватного устройства, которая в свою очередь взаимодействует с силовой пружиной 15 и подпружиненной защелкой 16, имеющей возможность взаимодействия с храповым колесом 5. Вторая зажимная губка 17 грузозахватного устройства закреплена на раме 1 жестко.
Храповой механизм в грузозахватном устройстве работает следующим образом.
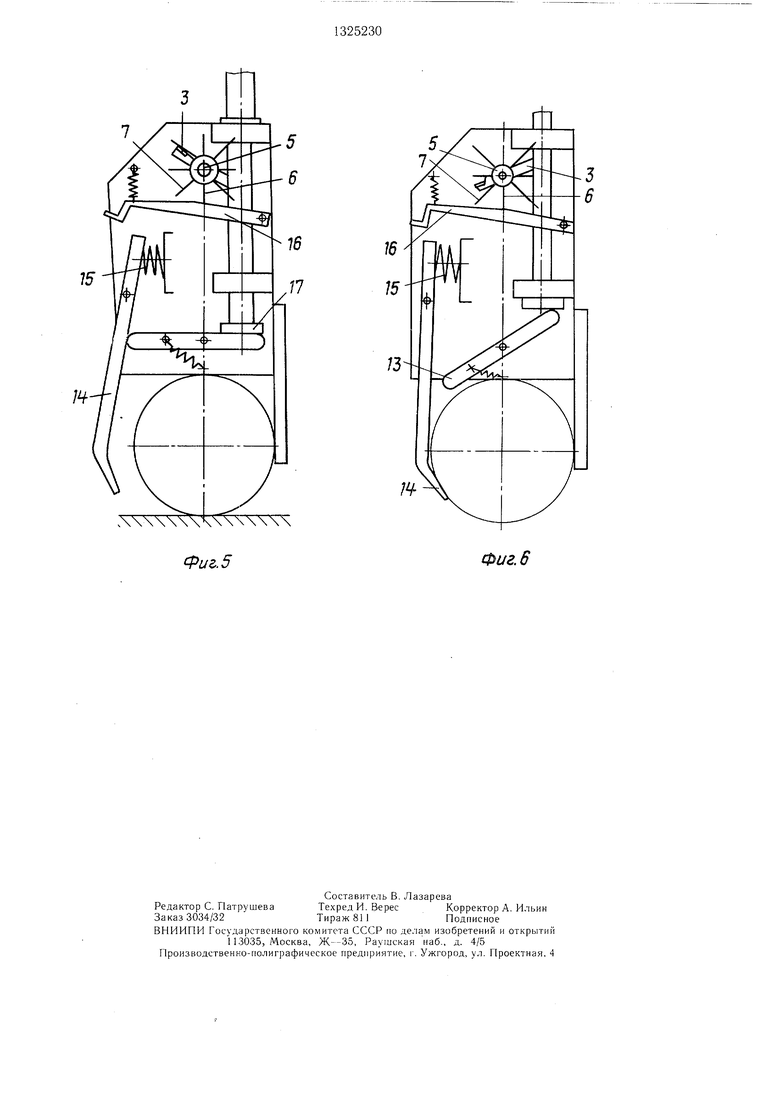
В исходном положении (фиг. 5) один из длинных 7 зубьев храпового колеса 5 контактирует с защелкой 16, удерживающей зажимную губку 14 в раскрытом положении, а силовую пружину 15 - в сжатом состоянии. При перемещении стрелы 12 грузозахватного устройства вниз (фиг. 6) рама 1 также перемещается вниз до упора в изделие 18. При дальнейшем перемещении стре- лы толкатель начинает перемещение относительно рамы 1,. поворачивая.собачку 3, ко.- торая, взаимодействуя своей.упругой илас5 тиной 10 с одним из зубьев храпового колеса 5, поворачивает его на заданный угол о;. При этом место длинного зуба 7 занимает короткий зуб 6.
По мере перемещения вниз толкателя 2
Q последний, воздействуя на одно из плеч силового рычага 13, отжимает шарнирную губку 14 и освобождает защелку 16, которая поднимается к короткому зубу 6. При этом толкатель 2 упирается своим верхним бортиком в раму 1, после чего перемещение
5 вниз его и стрелы 12 прекращается.
Затем стрелу 12 перемещают вверх (фиг. 6). Одновременно вверх начинает перемещение толкатель 2 относительно неподвижной рамы 1, поворачивая ведущую со0
0
бачку 3, которая, проходя мимо зуба храпового колеса 5, контактирует с ним своей упругой пластиной 10, пытаясь развернуть храповое колесо в обратную сторону, однако этому препятствует стопор 4. Одновременно с этим по мере перемещения толкате- 5 ля 2 вверх разворачивается силовой рычаг 13, освобождая шарнирную губку 14, которая, разворачиваясь под действием силовой пружины 15, зажимает изделие 18.
При дальнейшем перемещении стрелы 12 вверх толкатель 2 своим нижним буртиком подхватывает раму 1 с зажатым изделием 18, после чего оно транспортируется в требуемое место.
Формула изобретения
5 Храповой механизм, содержащий раму, привод, установленные на раме с возможностью возвратно-поступательного перемещения толкатель и взаимодействующие .между собой ведущую собачку, стопор и храпол вое колесо с чередующимися жесткими и упругими зубьями, отличающийся тем, что, с целью повышения КПД механизма за счет уменьшения холостого хода ведущей собачки, последняя имеет с храповым колесом общую ось, перпендикулярную оси стопора,
5 и выполнена в виде двуплечего рычага, одно плечо которого кинематически связано с толкателем, а другое выполнено в виде соединенных внахлест упругой пластины, предназначенной для взаимодействия с храповым колесом, и жесткой пластины, длина кото0
рои меньще длины упругой пластины.
Вид l повернуто
Фиг. 2
фуг.З
/
иг.5
Фиг. 6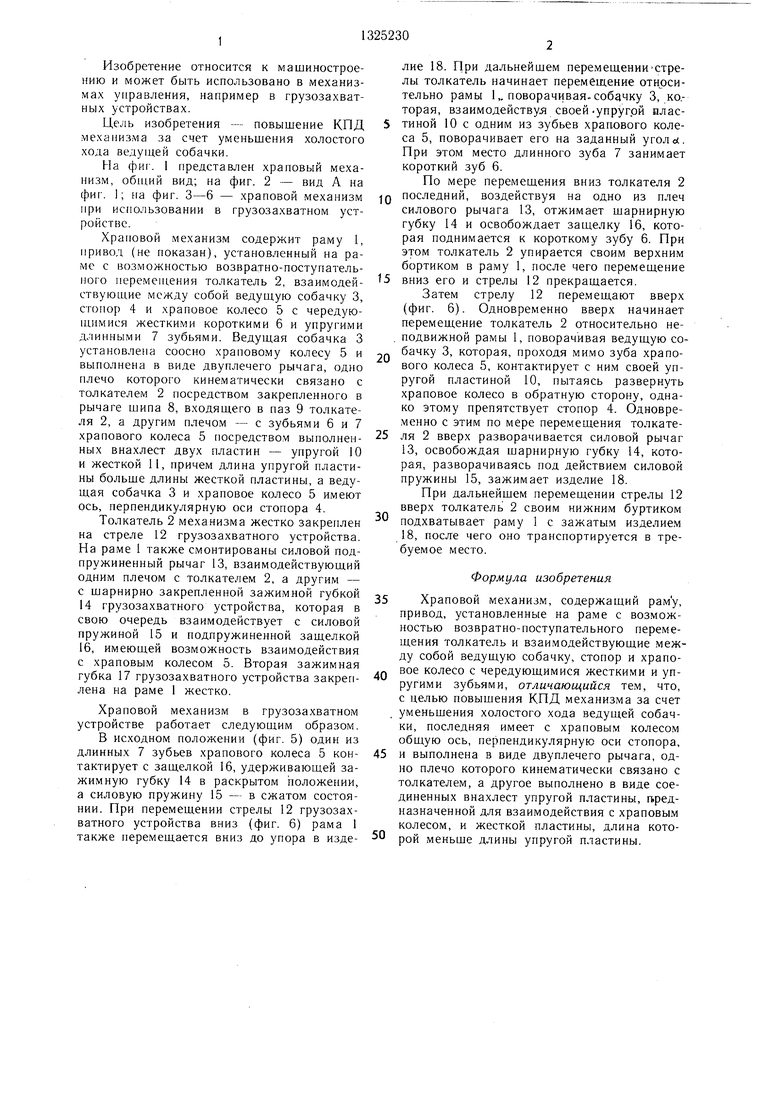
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1984 |
|
SU1212913A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ГИБКОГО ЭЛЕМЕНТА | 1992 |
|
RU2031077C1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для перекладки изделий | 1977 |
|
SU650948A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ДЕТАЛЕЙ | 2000 |
|
RU2212966C2 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Устройство для измельчения масла | 1984 |
|
SU1364253A2 |
| Устройство для резки и сборки проводов в пакет | 1983 |
|
SU1302385A1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
Изобретение относится к машиностроению и может быть использовано в механизмах управления. Цель изобретения - повышение КПД механизма за счет уменьшения холостого хода ведущей собачки. Храповой механизм содержит раму 1, на которой установлена ось храпового колеса 5. Толкатель 2 установлен на раме с возможностью возвратно-поступетельного перемеш,ения. Храповое колесо 5 имеет чередующиеся короткие жесткие и длинные упругие зубья. На одной оси с храповым колесом установлена ведуш,ая собачка 3 в виде двуплечего рычага; одно плечо которого взаимодействует с толкателем, а другое выполнено в виде устаноВоТенных внахлест упругой 10 и жесткой 11 -пластин. При работе храпового механизма, например, в грузозахватном устройстве длинный зуб 7 храпового колеса контактирует с зашелкой грузозахватного устройства и зажимная губка его находится в раскрытом положении. При перемещении толкателя 2 вниз собачка 3 своей упругой пластиной 10 взаимодействует с зубом храпового колеса, поворачивая его на заданный угол. Толкатель 2, воздействуя на плечо силового рычага, освобождает защелку, которая поджимается к короткому зубу 6. Перемещение толкателя 2 вниз прекращается. Далее толкатель 2 поднимается вверх, силовой рычаг разворачивается, освобождая губку, зажимающую изделие. 6 ил. SS сл со N5 СЛ N0 СО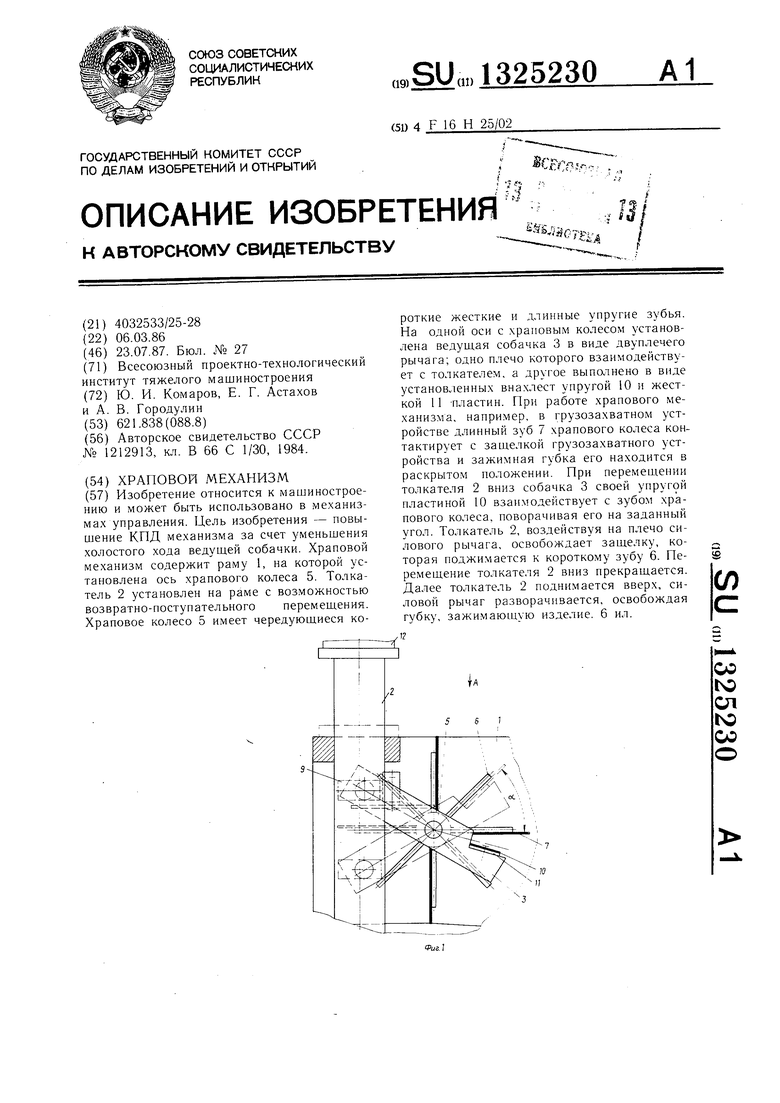
| Грузозахватное устройство | 1984 |
|
SU1212913A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
