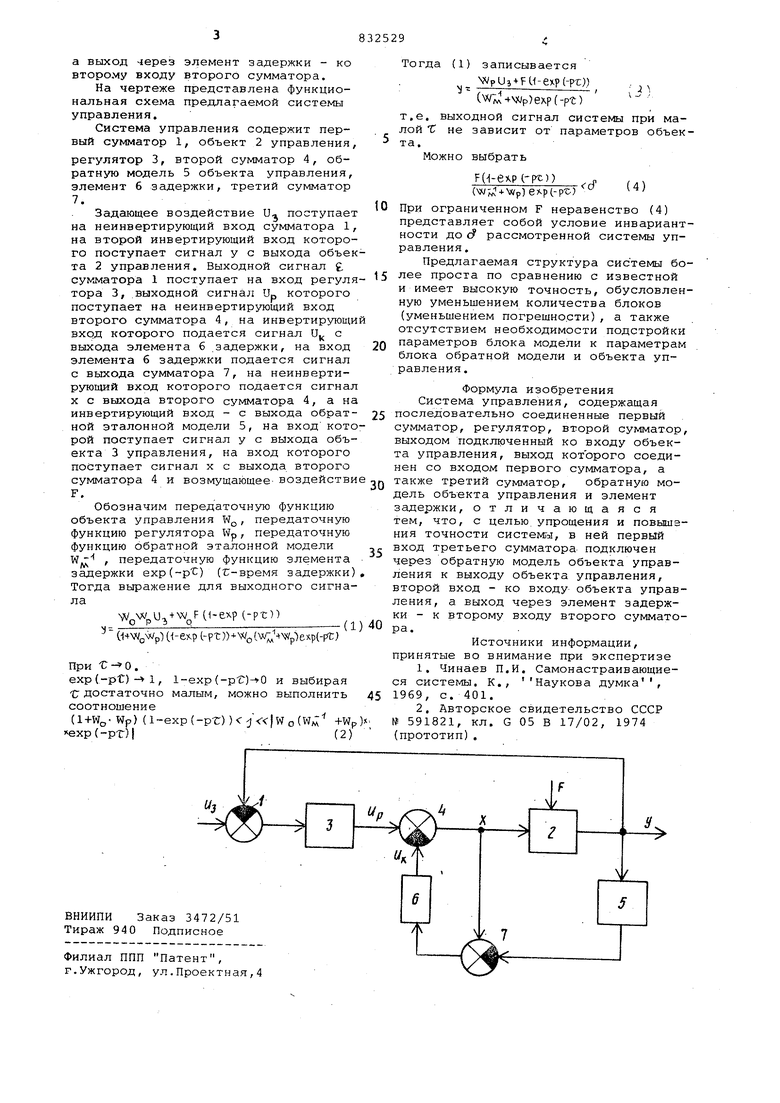
Изобретение относится к автоматике и может найти применение при проектировании сиртем автоматического управления различными объектами с пе ременными napaMexpaMJi и неконтролиру мыми возмущениями на входе. Известна система управления, содержащая модель объекта управления и последовательно соединенные первый сумматор, регулятор и второй сумматор, выход которого соединен со BXO-I дом объекта управления, выходом соединенного с одним из входов первого сумматора J21J. Однако эта система обладает низко помехоустойчивостью при возмущениях на входе объекта управления. Наиболее близкой по технической сущности к предлагаемой является сис тема управления,.содержащая последовательно соединенные первьй сумматор регулятор, второй сумматор, выходом подключенный ко входу объекта управления, выход которого соединен со входом первого сумматора, а также третий сумматор, элемент задержки, обратную модель объекта управления и четвертый сумматор, другой вход кото рого соединен с выходом регулятора, , а выход - через модель, объект а управ ления с одним из входов третьего сумматора, другой .вход которого соединен с выходом объекта управления, выход обратной модели объекта управления соединен с одним из входов второго сумматора .. .Оно содержит также модель-эталон с передаточной функцией,соответствующей номинальной передаточной функции объекта управления, и обратную модель объекта управления. Однако устройство обладает сложной структурой и недостаточной точностью. Кроме того, возникает необходимость подстройки параметров модели и обратной модели объекта управления до совпадения их значений с параметрами объекта управления, что ведет к .повьаиению сложности-системы и уменьшению точности, так как может не выполняться условие Wj 1. Цель изобретения - упрощение системы и повышение ее точности. Поставленная цель достигается тем, что в системе управления первый вход третьего сумматора подк.пючен через обратную модель объекта управления к выходу объекта управления, второй вход - ко входу объекта управления. а выход через элемент задержки - ко второму входу второго сумматора. На чертеже представлена функциональная схема предлагаемой системы управления. Система управления содержит первый сумматор 1, объект 2 управления, регулятор 3, второй сумматор 4, обратную модель 5 объекта управления, элемент 6 задержки, третий сумматор 7, Задающее воздействие U поступает на неинвертирующий вход сумматора 1 на второй инвертирующий вход которого поступает сигнал у с выхода объек та 2 управления. Выходной сигнал сумматора 1 поступает на вход регуля тора 3, выходной сигнал U которого поступает на неинвертирующий вход второго сумматора 4, на инвертирующи вхрд которого подается сигнал U, с выхода элемента б задержки, на вход элемента б задержки подается сигнал с выхода сумматора 7, на неинвертирующий вход которого подается сигнал X с выхода второго сумматора 4, а на инвертирующий вход - с выхода обрат ной эталонной модели 5, на вход кото рой поступает сигнал у с выхода объекта 3 управления, на вход которого поступает сигнал х с выхода второго сумматора 4 и возмущающее- воздействи г Обозначим передаточную функцию объекта управления W, передаточную функцию регулятора Wp, передаточную функцию обратной эталонной модели W , передаточную функцию элемента задержки ехр(-рС) (г-время задержки Тогда выражение для выходного сигналаWoV/pU3, (-РС)) (() ({-е,%. (-pt))-t-v/o()e)ip{-pc) При € - о . ехр(-р€), 1-ехр (-pD- O и выбирая t;достаточно малым, можно выполнить соотношение (l+Wo- Wp) (l-exp(-pt:));:l«|Wo(WM +W xpC-pr)(2) Тогда (1) записывается VpU34FU-exp(-pt)) (v/M-t-Wp)exp(-pt) т.е. выходной сигнал системы при малой Т не зависит от параметров объекта. Можно выбрать FCd-expCpt;)) (.)Vp)exp(-pT:) При ограниченном F неравенство (4) представляет собой условие инвариантности до с рассмотренной системы управления . Предлагаемая структура системы более проста по сравнению с известной и имеет высокую точность, обусловленную уменьшением количества блоков (уменьшением погрешности), а также отсутствием необходимости подстройки параметров блока модели к параметрам блока обратной модели и объекта управления. Формула изобретения Система управления, содержащая последЪвательно соединенные первый сумматор, регулятор, второй сумматор, выходом подключенный ко входу объекта управления, выход которого соединен со входом первого сумматора, а также третий сумматор, обратную модель объвкта управления и элемент задержки, отличающаяся тем, что, с целью упрощения и повышэния точности системгл, в ней первый вход третьего сумматора подключен через обратную модель объекта управления к выходу объекта управления, второй вход - ко входу объекта управления, а выход через элемент задержки - к второму входу второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Чинаев П.И. Самонастраивающиеся системы. К., Наукова думка , 1969, с. 401. 2.Авторское свидетельство СССР № 591821, кл. G 05 В 17/02, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1980 |
|
SU985761A1 |
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Регулятор с моделью объекта | 1983 |
|
SU1080118A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
