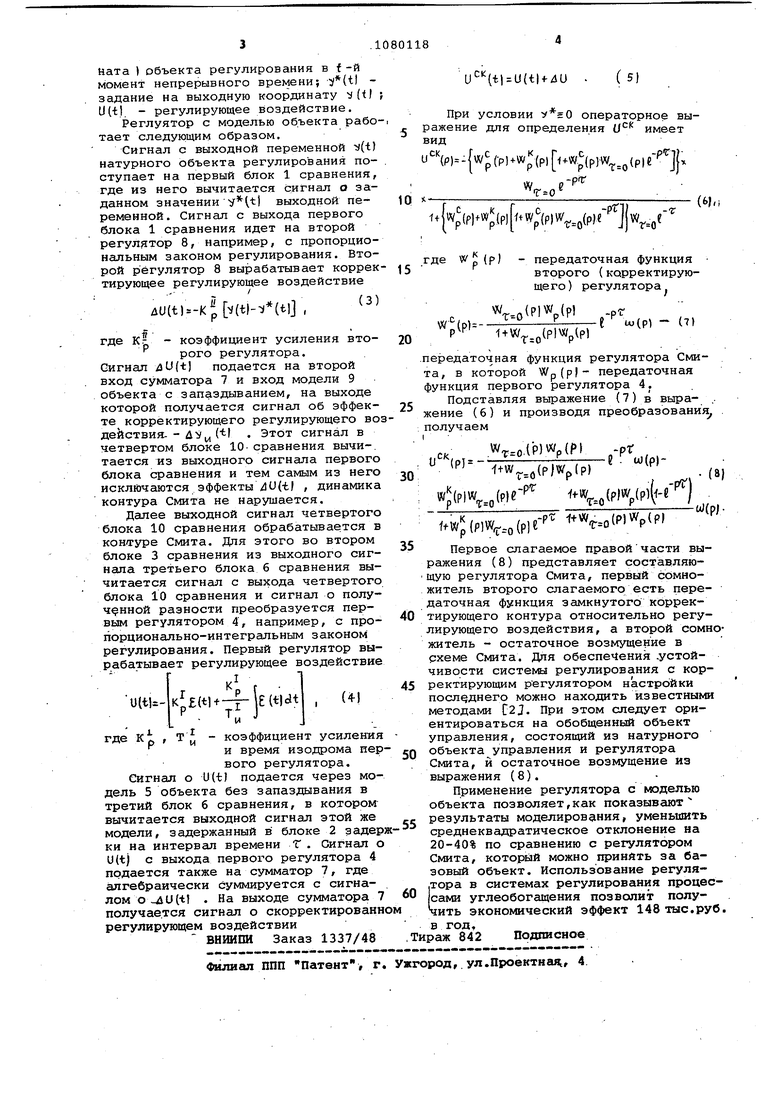
Изобретение относится к автомати ческому управлению и регулированию и может быть использовано для построения систем управления техничес кими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых внешних воздействий. Предполагается, что динамика объ екта по канадцам регулирования описы вается передаточной функцией -рТ ,-pt Г «/,o(pie , где К - коэффициент передачи; Т - постоянная времени инерци f - время, запаздывания. Внешние воздействия значительно изменяются на интервале времени f. За дача управления заключается в обеспечении инвариантности регулируемой координаты от внешних воздействий. Известна управляющая система с моделью объекта, содержащая систему оценивания, прогнозирующую модель в ускоренном времени, блок вычисления значения функционала: на свободном движении, блок численного дифференцирования 13. Недостаток этой управляющей системы заключается в ее сложности, св занной с решением задач вычисления значений функционала на свободном движении и численного дифференцирования. Известен регулятор с моделью объ екта -(регулятор Смита), содержащий первый блок сравнения, блок задержки, последовательно включенные втор блок сравнения первый регулятор, модель объекта без запаздывания и третий блок сравнения, второй вход которого соединен через блок задерж ки с выходом модели объекта без запаздывания, а выход - с первым входом второго блока сравнения. Этот регулятор построен таким образом, что модель объекта без запаздывания блок задержки и -третий блок сравнения в совокупности с натурным объектом управления образуют составной натурно-модельный объект управления в котором скомпенсировано запаздывание. Уже для такого составного объекта построен регулятор с типовы законом регулирования 2. Недостаток этого регулятора заключается в низкой точности регулирования, что объясняется следующим. Регулирующее воздействие регулятора Смита при нулевых начальных условия и при задающем воздействии, равном нулю, определяется выражением W.olp)W (р) -ptr U(p)--LiOРе- w(pj , (21+W,jj(P)W (р) . где Wp{p) - передаточная функция .регулятора; UJ - внешнее воздействие. Из этого выражения видно, что регулирующее воздействие наносится на модель объекта без запаздывания, подверженного влиянию внешнего воздействия с запаздыванием Т . В выходном сигнале (t) модели объекта без запаздывания отражаются эффекты предыстории o-l-t -T-e)+U(i-0 при а / 0. Регулирующее воздействие направлено на подавление именно отклонений у от заданного уровня, а не отклонений выходного сигнала г натурного объекта. В выходном же сигнале натурного объекта v отражаются эффекты предыстории w(t -t-e)+U(-t-r-e)J . Поэтому отклонёния V от v может быть сколь угодно большим. Целью же регулирования является минимизация отклонений V от заданного уровня, а значит точность регулирования может быть невысокой. Цель изобретения - повышение точности регулирования. Поставленная цель достигается тем, что в регулятор введены сумматор , последовательно включенные второй регулятор, модель объекта с запаздыванием и четвертый блок сравнения, причем выход первого блока сравнения подключен к входу второго регулятора и второму входу четвертого блока сравнения, выход которого соединен с вторым входом второго блока сравнения, первый вход сумматора соединен с выходом первого регулятора, второй вход сумматора - с выходом второго регулятора. Введенный второй регулятор пред-- назначен для выработки корректирующего воздействия Д U для подавления отклонений между у и у. Эффекты йО, полученные с помощью модели объекта с запаздЕлванием, вычитаются в четвертом блоке сравнения из ошибки регулирования. Тем самым производится модельное разделение вновь введенного корректирующего контура от контура Смита, иначе последний в погоне за целью V 0 будет воспринимать uU как компоненту возмущения . На чертеже приведена блок-схема регулятора с моделью объекта. Регулятор с моделью объекта содержит первый блок 1 сравнения, блок 2 задержки, второй блок 3 сравнения, первый регулятор 4, модель 5 объекта без запаздывания, третий блок б сравнения, сумматор 7, второй регулятор 8, модель 9 субъекта с запаздыванием, четвертый блок 10 сравнения. На чертеже приняты обозначения: У() - выходная переменная коорди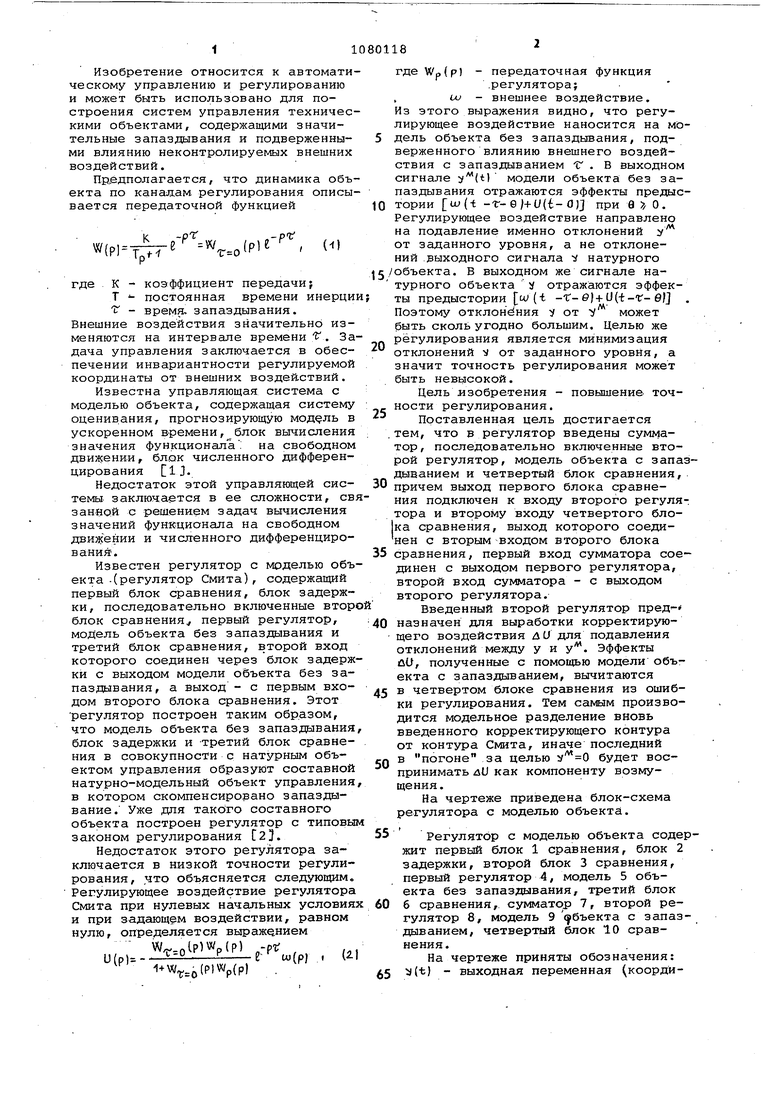
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1984 |
|
SU1179269A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
| Регулятор | 1980 |
|
SU903802A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
РЕГУЛЯТОР С МОДЕЛЬЮ ОБЪЕКТ содержаишй первый блок сравнения, блок задержки, последовательно вклю ченные второй блок сравнения, первый регулятор, модель объекта без запаздывания и третий блок сравнения, второй вход которого соединен через блок задержки с выходом модели объекта без запаздывания, а выход - с первым входом второго блока с эавнения, о т л и ч а ю щ и и с я тем, ЧТО, с целью повышения точности регу ли рования, в него вйедены сумматор, последовательно включенные второй регулятор, модель объекта с запаздыванием и четвертый блок сравнения. Причем выход первого блока сравнения подключен к входу второго регулятора и второму входу четвертого блока , сравнения, выход которого соединен j с вторым входом второго блока сравнения, первый вход сумматора соединен с выходом первого регулятора, а второй вход - с выходом второго регулятора. :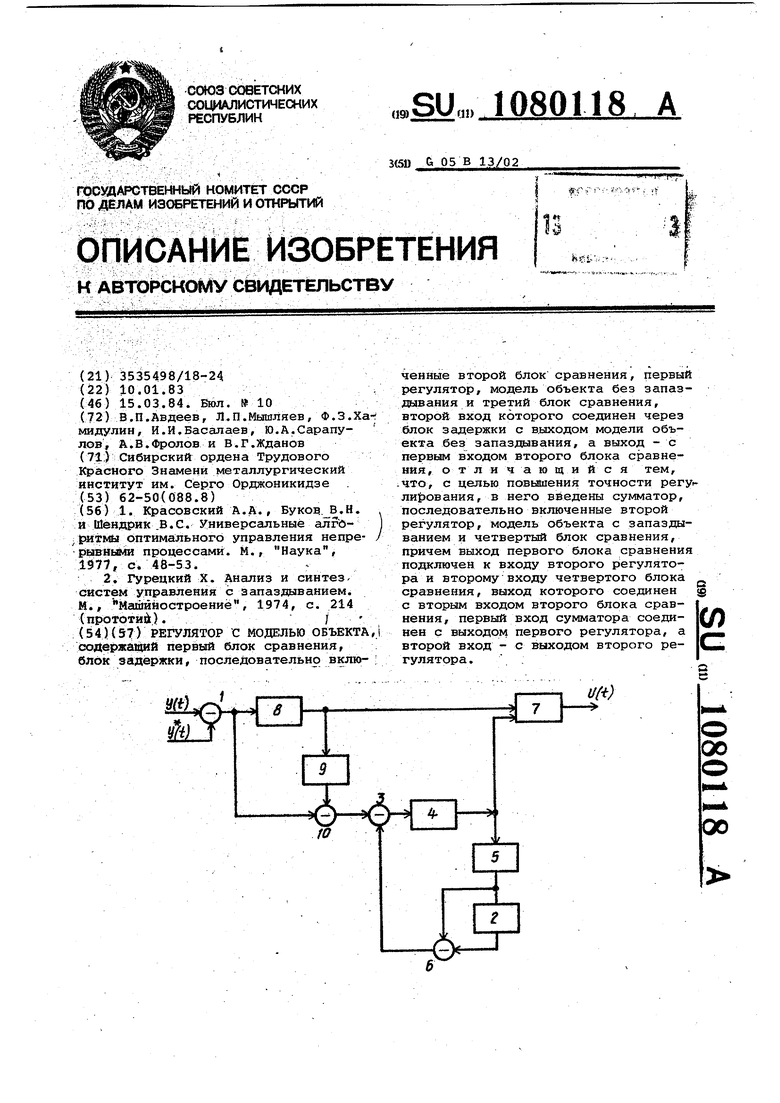
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Красовский А.А | |||
| , Букоч.В.Н И Шендрик .B.C | |||
| Универсальные алго | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| М., Наука, 1977, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гурецкий X | |||
| Анализ и синтез/ систем управления с запаздыванием | |||
| М., Мгиаййостроениё, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
