Изобретение относится к сварке, а именно к конструкции устройства для ориентации тел вращения, преимущественно бездисковых колес автомобиля с вентильным отверстием, перед подачей колес на позицию сборки под сварку с ушками для крепления колес.
Целью изобретения является повышение производительности путем сокра- щения межоперационного времени.
На фиг. 1 изображено предлагаемое устройство, общий вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3- развертка кинематической цепи устрой на фиГ. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - разрез Г-Г на фиг. 2; на фиг. 7 - разрез Д-Д на фиг. 6; на фиг. 8 - разрез Е-Е на фиг. 7.
Устройство содержит основание 1, на котором установлен подъемный стол 2 с механизмом предварительного ориентирования обода колеса 3 по вентиль
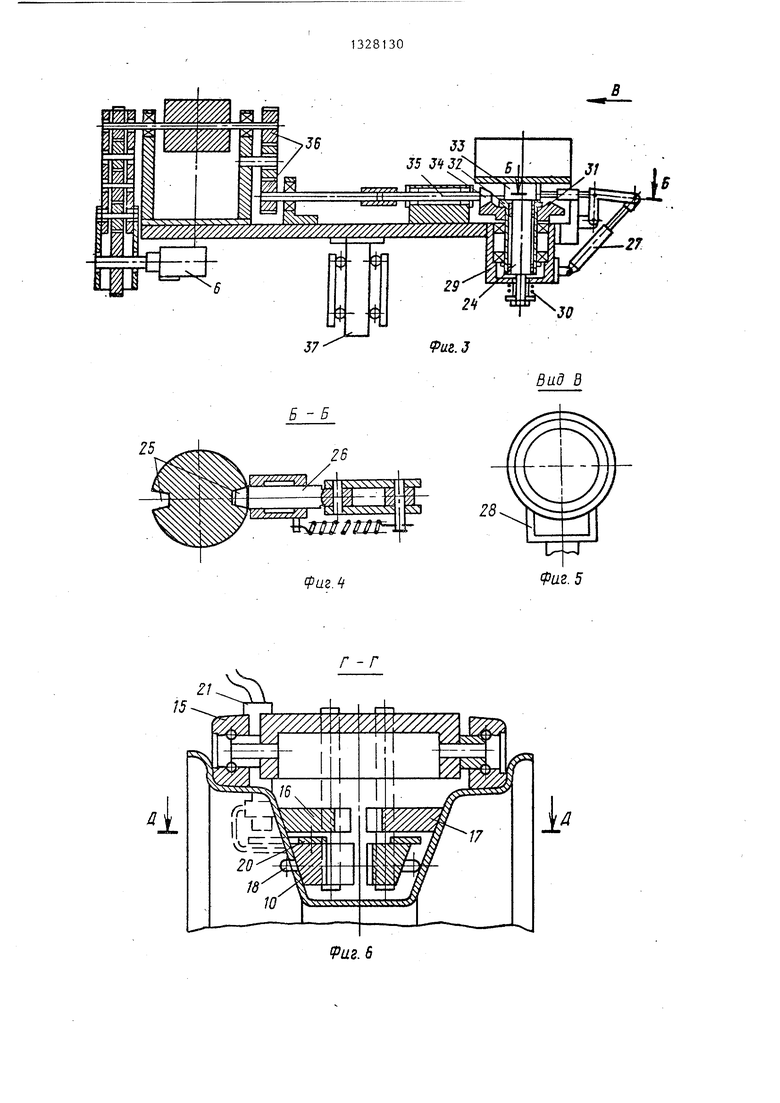
ному отверстию 4, выполненному в виде 25..темы цилиндрических передач 36 и рабовращателя 5 колеса, например роликового, с приводом 6 вращения роликов и фиксатора 7, установленного на стойке. Фиксатор 7 включает в себя привод В, смонтированный также на стойке, а также подпружиненные пру-, жиной 9 рычаги 10 и 11, которые поворачиваются вокруг осей 12 при воздействии на них клина 13. Последний выполнен в виде двуплечего рычага и имеет привод 14. Фиксатор 7 снабжен также двумя опорными роликами 15, обеспечивающими заданное положение фиксатора на криволинейной поверхности обода колеса 3 и дополнительными рычагами 16 и 17, соосными рычагам 10 и 11, установленными также на осях 12. Рычаги 10 и 11 имеют на - концах упоры 18 и 19, контактирующие с вентильным отверстием 4, на одном из рычагов, например на рычаге 10, закреплен флажок 20, перекрывающий датчик 21 для обнаружения вентильного отверстия на ободе колеса 3 в момент контакта упора 18 с вентильным отверстием 4. Для обеспечения полного перекрытия датчика 21 флажок связан с осью 22 с рычагом 10 и осью 23 с рычагом 16, причем ось 23 размещена в, пазу флажка 20.
Механизм предварительного ориенти- рования обода колеса 3 по вентильному отверстию 4 кинематически связан с механизмом окончательного ориен-
35
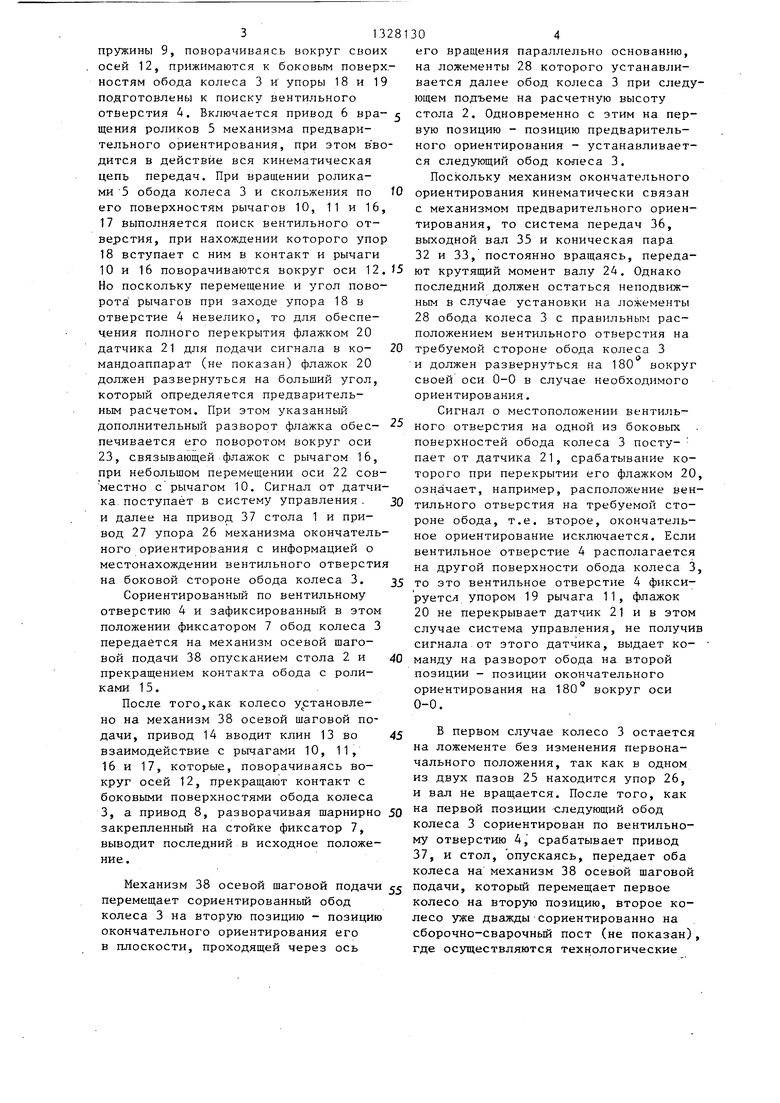
тающим от привода 6. Описанная система передач представляет собой кинематическую связь обоих механизмов ориентации.
30 Стол 2 установлен с возможностью подъема и опускания с помощью привб-. да 37 для выполнения операции снятия обода колеса 3 механизма 38 осевой шаговой подачи.
Устройство для ориентации тел вращения работает следующим образом. По команде системы управления механизмами (не показана) с датчиками включается привод 8 и на обод колеса
40 3, который доставлен механизмом шаговой подачи 38 на позицию предварительного ориентирования, опускается фиксатор 7, ролики 15 которого, контролируя правильную установку фикса45 тора на поверхности обода колеса 3, фиксируют его в требуемом положении. Далее включается привод 37, поднимающий стол 2 с установленными на нем механизмами предварительного и окон5Q чательного ориентирования до контакта роликов 5 с ободом колеса 3, и при. дальнейшем небольшом перемещении вверх обод колеса 3 снимается с механизма осевой шаговой подачи 38 и
gg остается на первой позиции. Одновременно подается сжатый воздух в привод 14 клика 13, который выходит из зацепления с рычагами 10, 11 и 16,17. Указанные пары рычагов под действием
5
тирования обода колеса 3 в зависимости от месторасположения его стороны с вентильным отверстием 4, т.е. поворота колеса в плоскости, проходящей через ось его вращения параллельно основанию 1. Этот механизм установлен также на подъемном столе 2 и выполнен в виде вала 24 с диаметрально расположенными на нем пазами 25 и упора 26, связанного с приводом 27 и взаимодействующего с одним из. этих пазов 25. На валу 24 жестко закреплен ложемент 28 для установки на него сориентированного по вентильному отверстию колеса 3, а сам вал расположен в стакане 29 стола 2 и подпружинен пружиной 30. Вращение вала осуществляется с помощью коничес- 0 кой шестерни 31 и втулки 32, поджимающей вал 24 в его части 33 к шесте)- не 31. Последняя находится в зацеп- . лении с шестерней 34, установленной на валу 35, являющимся выходным сис5
тающим от привода 6. Описанная система передач представляет собой кинематическую связь обоих механизмов ориентации.
0 Стол 2 установлен с возможностью подъема и опускания с помощью привб-. да 37 для выполнения операции снятия обода колеса 3 механизма 38 осевой шаговой подачи.
Устройство для ориентации тел вращения работает следующим образом. По команде системы управления механизмами (не показана) с датчиками включается привод 8 и на обод колеса
0 3, который доставлен механизмом шаговой подачи 38 на позицию предварительного ориентирования, опускается фиксатор 7, ролики 15 которого, контролируя правильную установку фикса5 тора на поверхности обода колеса 3, фиксируют его в требуемом положении. Далее включается привод 37, поднимающий стол 2 с установленными на нем механизмами предварительного и оконQ чательного ориентирования до контакта роликов 5 с ободом колеса 3, и при. дальнейшем небольшом перемещении вверх обод колеса 3 снимается с механизма осевой шаговой подачи 38 и
g остается на первой позиции. Одновременно подается сжатый воздух в привод 14 клика 13, который выходит из зацепления с рычагами 10, 11 и 16,17. Указанные пары рычагов под действием
313
пружины 9, поворачиваясь вокруг своих осей 12, прижимаются к боковым поверхностям обода колеса 3 и упоры 18 и 19 подготовлены к поиску вентильного отверстия 4. Включается привод 6 вра- щения роликов 5 механизма предварительного ориентирования, при этом вводится в действие вся кинематическая цепь передач. При вращении роликами 5 обода колеса 3 и скольжения по его поверхностям рычагов 10, 11 и 16,
17выполняется поиск вентильного отверстия, при нахождении которого упор
18вступает с ним в контакт и рычаги
10 и 16 поворачиваются вокруг оси 12. Но поскольку перемещение и угол повороти рычагов при заходе упора 18 в отверстие 4 невелико, то для обеспечения полного перекрытия флажком 20 датчика 21 для подачи сигнала в ко- мандоаппарат (не показан) флажок 20 должен развернуться на больший угол, который определяется предварительным расчетом. При этом указанный дополнительный разворот флажка обес- печивается его поворотом вокруг оси 23, связывающей флажок с рычагом 16, при небольшом перемещении оси 22 сов- местно с рычагом 10. Сигнал от датчика, поступает в систему управления . и далее на привод 37 стола 1 и привод 27 упора 26 механизма окончательного ориентирования с информацией о местонахождении вентильного отверстия на боковой стороне обода колеса 3.
Сориентированный по вентильному отверстию 4 и зафиксированный в этом положении фиксатором 7 обод колеса 3 передается на механизм осевой шаговой подачи 38 опусканием стола 2 и прекращением контакта обода с роликами 15.
После того,как колесо установлено на механизм 38 осевой шаговой подачи, привод 14 вводит клин 13 во взаимодействие с рьгаагами 10, 11, 16 и 17, которые, поворачиваясь вокруг осей 12, прекращают контакт с боковыми поверхностями обода колеса 3, а привод 8, разворачивая шарнирно закрепленный на стойке фиксатор 7, выводит последний в исходное положение .
Механизм 38 осевой шаговой подачи перемещает сориентированный обод колеса 3 на вторую позицию - позицию окончательного ориентирования его в плоскости, проходящей через ось
304
его вращения параллельно основанию, на ложементы 28 которого устанавливается далее обод колеса 3 при следующем подъеме на расчетную высоту стола 2. Одновременно с этим на первую позицию - позицию предварительного ориентирования - устанавливается следующий обод колеса 3.
Поскольку механизм окончательного ориентирования кинематически связан с механизмом предварительного ориентирования, то система передач 36, выходной вал 35 и коническая пара 32 и 33, постоянно вращаясь, передают крутящий момент валу 24. Однако последний должен остаться неподвижным в случае установки на ложементы 28 обода колеса 3 с правильным расположением вентильного отверстия на требуемой стороне обода колеса 3
и должен разв-ернуться на 180 вокруг своей оси 0-0 в случае необходимого ориентирования.
Сигнал о местоположении вентильного отверстия на одной из боковых поверхностей обода колеса 3 посту- пает от датчика 21, срабатывание которого при перекрытии его флажком 20 означает, например, расположение вентильного отверстия на требуемой стороне обода, т.е. второе, окончательное ориентирование исключается. Если вентильное отверстие 4 располагается на другой поверхности обода колеса 3 то это вентильное отверстие 4 фиксируется упором 19 рычага 11, флажок 20 не перекрывает датчик 21 и в этом случае система управления, не получи сигнала от этого датчика, выдает ко- манду на разворот обода на второй позиции - позиции окончательного ориентирования на 180° вокруг оси 0-0.
В первом случае колесо 3 остается на ложементе без изменения первоначального положения, так как в одном из двух пазов 25 находится упор 26, и вал не вращается. После того, как на первой позиции -следующий обод колеса 3 сориентирован по вентильному отверстию 4, срабатывает привод 37, и стол, опускаясь, передает оба колеса на механизм 38 осевой шаговой подачи, который перемещает первое колесо на вторую позицию, второе колесо уже дважды сориентированно на сборочно-сварочный пост (не показан) где осуществляются технологические
5132
процессы одновременной сборки обода колеса 3 с ушками и их сварки.
В случае, если на вторую позицию поступает колесо 3, которое необхо- димо еще развернуть на 180° , сигнал об этом от датчика 21 поступает через систему управления на привод 27 упо-- ра 26. Последний при этом выходит из паза 25, и крутящий момент от шестерни 31 передается валу 24 посредством шестерни 31 и втулки 32, которая прижата к шестерне 31 под действием пружины 30, и втулки 32 и части 33 вала. Упор 26, выйдя из зацепления с пазом 25, остается прижатым к поверхности вала 24 и, скользя по нему, входит в противоположный паз 25. Вращение вала прекращается, разворот на 180° выполнен. Далее следует опускание стола 2 и передача обода колеса 3 на дальнейшую позицию - сборку и сварку. Вторая позиция подготовлена для установки следующего колеса, ин- формация о местоположении вентильного отверстия которого на одной из сторон обода уже находится в системе управления и поступает на вторую позицию после того, как предыдущее, дважды сориентированное колесо уже передано на механизм осевой -шаговдй по- , дачи.
Устройство для ориентации бездне- . ковых колес автомобиля позволяет повысить производительность путем сокращения межоп.ерационного времени.
30 Формул
изобретения
Устройство для ориентации тел вращения, преимущественно бездисковых колес автомобиля с вентильным отверстием, перед подачей колес на позицию сборки под сварку с ушками для крепления колес, содержащее смонтированные на основании механизм осевой шаговой подачи колес с направляющими, механизм предварительной ориентации вентильного отверстия с вращателем колеса относительно его оси вращения, механизм окончательной ориентации вентильного отверстия с вращателем колеса в плоскости, проходящей через ось его вращения параллельно основанию, систему управления механизмами с датчиками, о т- ли чающееся тем, что, с целью повышения производительности путем сокращения межоперационного времени, оно оснащено установленным на основании подьемным столом,на котором размещены кинематически связанные между собой механизмы предварительной и окончательной ориентации вентильного отверстия колеса, направляющие установлены на основании параллельно опорной плоскости стола на расстоянии от рабочей поверхности стола меньшем высоты подъема стола, а вращатель колеса относительно его оси вращения оснащен датчиком для обнаружения вентильного отверстия в колесе, соединенным с вращателем колеса в плоскости, проходящей через ось его вращения параллельно осно- ванию.
/«
8идА
Г
Фиг. 2
Jff
7/////////////////////y////
Л-Л37В
JJ
J5 3f 3Z
Bad В
Б - Б
26
Риг.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентирования деталей | 1976 |
|
SU654389A1 |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
| Устройство для монтажа шины на обод колеса транспортного средства | 1986 |
|
SU1382671A2 |
| Автомат для сборки хомута из ленты | 1972 |
|
SU562358A1 |
| Автоматическая линия для балансировки коленчатых валов | 1984 |
|
SU1221520A1 |
| АВТОМАТ РОТОРНОГО ТИПА ДЛЯ ПОДРЕЗКИ КРУГЛЫХЗАГОТОВОК | 1969 |
|
SU251402A1 |
| Устройство для монтажа шины на обод колеса транспортного средства | 1983 |
|
SU1117233A1 |
| Устройство для ориентирования деталей | 1985 |
|
SU1294562A1 |
| Устройство для ориентирования деталей | 1972 |
|
SU438518A1 |
| ЛИНИЯ ДЛЯ ВЫРАБОТКИ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ НА ЛИСТАХ | 1971 |
|
SU424550A1 |

Изобретение относится к области сварки, а именно к конструкции устройства для ориентации тел вращения, преимущественно бездисковых колес автомобиля с вентильным отверстием. перед подачей колес на позицию сборки под сварку с утками для крепления колес. Целью изобретения является повьш1ение производительности. Устройство содержит механизм осевой шаговой подачи и две позиции ориентирования колеса 3, на первой из которых установлен механизм предварительной ориентации колеса 3, осуществляющий поиск вентильного отверстия при вращении колеса 3, а на второй - механизм окончательной ориентации колеса, где производят поворот колеса в плоскости, проходящей через ось его вращения параллельно основанию. Обе позиции ориентирования кинематически связаны между собой, что обеспечивает сокращение межоперационного времени. 8 ил. S (Л фигЛ
Г - Г
Риг. 6
Л-Л
-
fw3.5
аг. 7
| Владзиевский А.П | |||
| и др | |||
| Основы автоматизации производства в машиностроении.-М | |||
| : Высшая школа, 1974, с | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| XIY, IY класс. | |||
