Изобретение относится к машиностроению, в частности к устройствам для выполнения вспомогательных операций, связанных с изменением положения изделий, и может быть применено в различных отраслях промышленности в целях механизации ручного труда.
Цель изобретения - расширение функциональных возможностей за счет увеличения зоны обслуживания.
На чертеже показана кинематическая схема устройства.
Стержневой манипулятор состоит из корпуса 1, механической руки 2 и привода 3, который состоит из ведущего зубчатого колеса 4, ведомого зубчатого колеса 5, смонтированного с возможностью поворота в корпусе 1, и трех промежуточных зубчатых колес 6, 7 и 8, причем последние два колеса смонтированы на поворотном рычаге 9 который зафиксирован относительно корпуса стопором 10. Механическая рука 2 снабжена захватом, состоящим из неподвижной губки 11 и шарнирно связанной с ней и подпружиненной подвижной губки 12.
Механическая рука шарнирно связана с двумя стержнями 13 и 14. Стержень 14 совместно с двуплечим рычагом 15 образует механизм подъема руки 2. Стержень 13 шарнирно связан с корпусом и выполнен полым. В его центральном отверстии размещен гибкий элемент 16, связанный одним своим концом с подвижной губкой 12 захвата, а другим - с рычагом 17. В средней своей части стержни 13 и 14 размещены в отверстиях сферических шарниров 18,.диаметрально расположенных на зубчатом колесе 5.
Манипулятор работает следующим образом.
При включении двигателя вра1цение через зубчатые, колеса 4 и 8 передается на ведомое зубчатое колесо 5, которое поворачивается и через стержни 13 и 14 поворачивает механическую руку 2 в окружном направлении. При повороте рычага 9 в другое крайнее положение зубчатые колеса 8 и 5 вводятся из зацепления, а вращение от колеса 4 передается на ведомое колесо 5 через зубчатые колеса 7 и 6, при
этом механическая рука поворачивался в обратном направлении. При нейтральном положении рычага 9 зубчатые колеса 7 и 8 выведены из зацепления с зубчатыми колесами 5 и 6, при этом рука 2 не поворачивается. Для подъема захвата механической руки оператор нажимает на педаль рычага 15. Для разжима захвата оператор нажимает на педаль рычага 17, при этом натягивается гибкий элемент 16 и под вижная губка 12, преодолевая усилие пружины, отходит от неподвижной губки 11.
Формула изобретения
с Стержневой манипулятор, содержащий корпус, смонтированную в нем механическую руку с захватом, механизм подъема механической руки, выполненный в виде шарнирно связанных двуплечего рычага и стержня, и привод с ведущим и ведомым зуб- 0 чатыми колесами, причем последнее кинематически связано с механической рукой, отличающийся тем, что, с целью расщире- ния функциональных возможностей за счет увеличения обслуживания, он снабжен дополнительным стержнем и двумя сферическими шарнирами, причем последние диаметрально расположены на ведомом зубчатом колесе и в каждом из их подвижных сферических элементов выполнено отверстие, при этом в отверстии одного из сферических Q шарниров размещен с возможностью продольного перемещения стержень механизма подъема механической руки и шарнирно с ней связан, а в отверстиии другого сферического шарнира размещен дополнительный стержень, одним своим концом шар- с нирно связанный с корпусом, а другим - с механической рукой, причем привод снабжен тремя дополнительными зубчатыми колесами, первое из которых находится в постоянном зацеплении с ведомым зубчатым колесом, а два других - с ведущим, 0 при этом они смонтированы на фиксирующем относительно корпуса поворотном рычаге с возможностью взаимодействия одного из них с первым дополнительным зубчатым колесом, а второго - с ведомым зубчатым колесом.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Стержневой манипулятор | 1987 |
|
SU1414621A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Прибор для воспроизведения кривых | 1989 |
|
SU1655817A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАСЧЕТА ШАТУННО-КУЛАЧКОВЫХ МЕХАНИЗМОВ | 1970 |
|
SU274360A1 |
Изобретение относится к области машиностроения, в частности к устройствам для выполнения вспомогательны.х операций, связанных с изменением положения изделий, и может быть применено в различных отраслях промышленности в целях механизации ручного труда. Цель изобретения - расширение функциональных возможностей за счет увеличения зоны обслуживания. При включении двигателя через зубчатые колеса 4 и 8 вращение передается на ведомое зубчатое колесо 5, смонтированное в корпусе 1. При этом начинают поворачиваться стержни 13 и 14 и далее механическая рука 2, которая шарнирно с ними связана. При переключении в другое крайнее положение рычага 9 зубчатые колеса 5 и 8 выходят из зацепления, а вращение на колесо 5 передается через зубчатые колеса 4, 6 и 7, при этом происходит поворот механической руки в противоположном направлении. В нейтральном положении рычага 9 зубчатые колеса 7 и 8 выведены из зацепления с колесами 5 и 6, при этом рука 2 неподвижна в окружном направлении. 1 ил. 1 СО Ю 00 N0 QO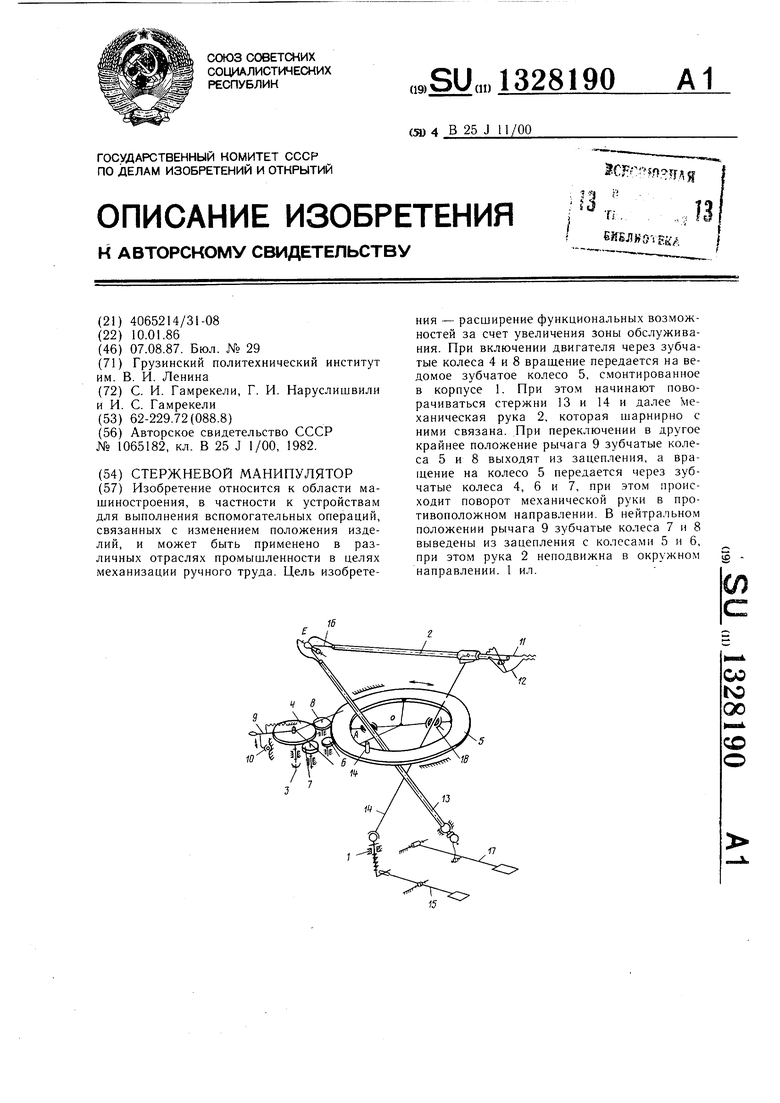
| Манипулятор | 1982 |
|
SU1065182A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
