гг
г
20
18
27 г5
23 28
-26
(О
4
О5
ю
Изобретение относится к машиностроению, в частности к .манипуляторам, для механизации транснортировки изделий.
Цель изобретения - расширение те.х- нологических возможностей за счет увеличения зоны обслуживания.
На чертеже ноказаиа кинематическая схема манипулятора.
На валу 1, который смонтирован в корпусе 2, закреплены зубчатое колесо 3 и фрикционный диск 4 муфты сцепления. На этом же валу размещены подвижный фрикционный диск 5 и упругий элемент 6. В диске 5 выполнена проточка 7, в которой размещен ролик 8, смонтированный на рычаге 9. Этот рычаг осью 10 связан с корпусом. Зубчатое колесо 3 находится в зацеплении с зубчатым колесом 11, которое имеет отверстие 12. В этом отверстии размещен полый стержень 13, который связан сферическим шарниром 14 с корпусом 2.
Стержень имеет кольцо 15, которое серьгой 16 связано с рычагом 17, смонтированным lia оси 18. К серьге 16 прикреплен конец гибкой тяги 19. Стержень 13 поворотным шарниром, имеющим ось 20 с роликом 21, связан направляюшим стержнем 22 .механической руки, на конце которого закреплены губка 23 и ось 24. На этой Оси смонтирован рычаг 25 с губкой 26, которая поджата к губке 23 упругим элементом 27. Губки 23 и 26 образуют захват. Гибкая тяга 19 размешена в отнорстиях стержней 13 и 22, а второй ее конец зак)еплеп на губке 26. Направляющий стержепь расположен во втулке 28, которая :парнпром, имеюшим ось 29, связана со стержнем 30, проходящим через от- верстпе 31 в планке 32. Эта планка установлена в окружном пазу 33 зубчатого Ko. ieca 34 и зафиксирована винтом 35. Зубчатое колесо 34 смонтировано в корпуиаходится в зацепле1ши
колеcc.iM 3. Стержепь 30 с помощью пар- нира 36 связан с тягой 37, расноло- женной в направляющих корпуса 2. Тяга подпружинена относительно корпуса упругим элементом 38 и через паз 39 связана с рычагом 40, смонтированным на оси 41.
Манипулятор работает следуюц.1,им образом.
При включении привода через конические фрикционные диски 4 и 5 вращение передается на вал 1 и далее через колесо 3 на колеса 11 и 34. При этом начинают перемещаться стержни 13 и 30,
а также связанный с ними направляющий стержень 22 механической руки с губками 23 и 26. Оператор нажимает на рычаг 17, в результате чего через гибкую тягу 19 производится поворот рычага 25 и раскрытие
губок 23 и 26. Для захвата изделия оператор освобождает рычаг 17, губки под действием упругого элемента 27 с.мыкают- ся и изделие транспортируется по пространственной траектории до места, где губки раскрываются и освобождают его. Останов губок в требуемом положении осуществляется оператором с помощью рычага 9, расцепляющего фрикционные диски 4 и 5. Регулировка положения планки 32 на колесе 34 по пазу 33 позволяет изменить Взаимное положение стержней 13 и 30, что приводит к изменению траектории перемещения губок. Подъем и опускание стержня 30 с втулкой 28, осуществляемые оператором с помощью рычага 40, также приводят к изменению траектории перемепхения губок.
Формула изобретения
Стержневой манипулятор, содержащий корпус, в котором смонтировано первое приводное зубчатое колесо, два стержня, первый из которых щарнирно связан с этим колесом, а второй стержень имеет шарнирпо связанную с ним втулку, а также механическую руку с захватом, имеющую
направляющий стержень, который щарнирно связан с первым стержнем и раз.мещен во втулке второго стержня, и приводы, отличающийся тем, что, с целью расширения технологических возможносгей за счет увеличения зоны обслуживания, он снабжен
вторым зубчатым колесом и планкой с отверстием, причем второе зубчатое колесо кинематически связано с первым, планка закреплена па втором зубчато.м колесе с возможностью регулировочной перестановки по нему в окружном направлении, а второй
стержень размещен в отверстии планки, прп этом привод зубчатых колес снабжен управляемой муфтой сцепления.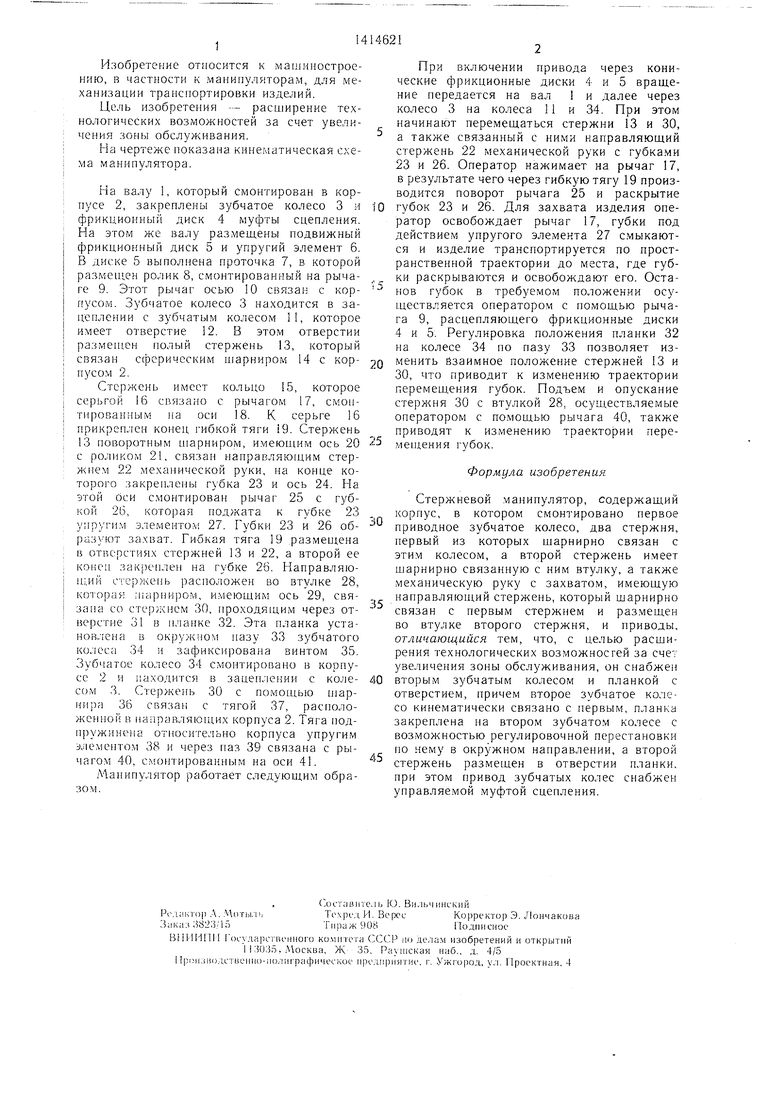
| название | год | авторы | номер документа |
|---|---|---|---|
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Стержневой манипулятор | 1986 |
|
SU1328190A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам для механизации транспортировки изделий. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания. При включении, привода через фрикционные диски 4 и 5 вращение передается на вал 1 и далее через зубчатое колесо 3 на зубчатые колеса 11 и 34. При этом начинают перемещаться стержни 13 и 30, а также связанный с ними направляющий стержень 22 механической руки с губками, образующими захват. Раскрытие захвата осуществляется нажатием на рычаг 17. Изменение траектории перемещения губок осуществляется при нажатии на рычаг 40 или перемещением планки 32 по окружному пазу 33 на зубчатом колесе 34. 1 ил.
| Стержневой манипулятор | 1986 |
|
SU1328190A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
