Изобретение отипсится к электромеханике, я именно к кп,1 ;1екторн(1му электроприподу с регулируемой скоростью, и может быть использовано в ручных машинах,
.Цель изобретения - повьппенпе надежности.
На фиг.1-5 изображены схемы электропривода, варианты.
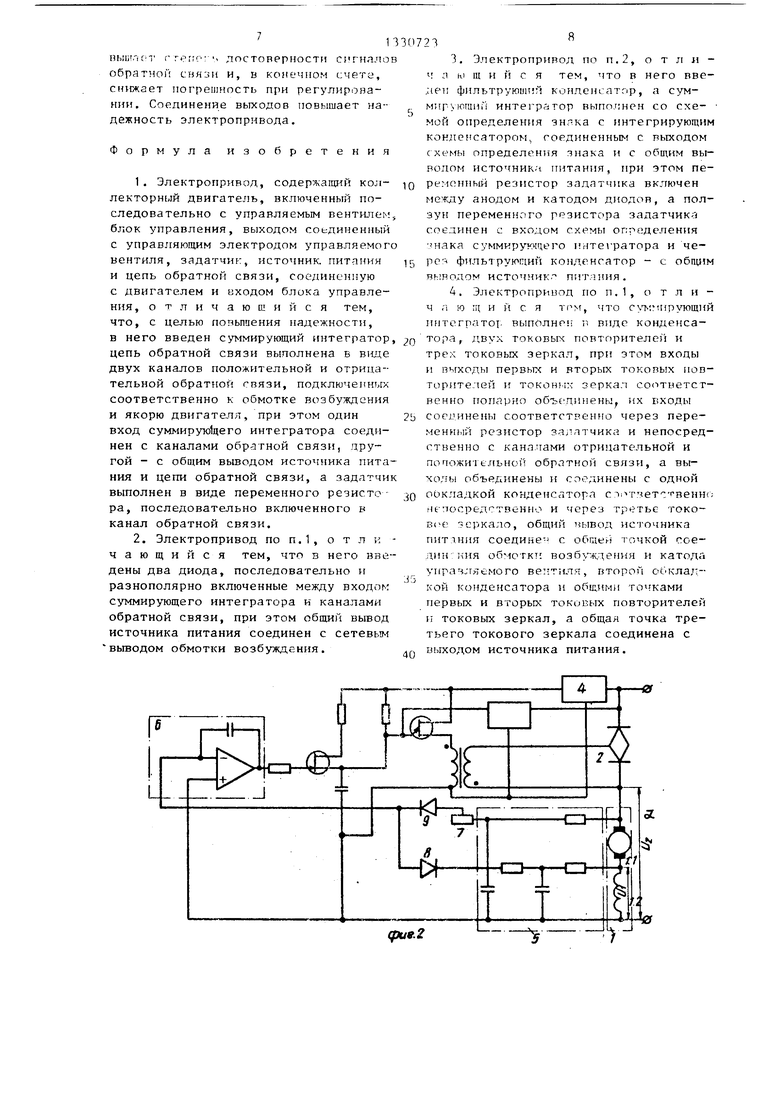
Электропривод по фиг. 1 содержит кол- лекторньп двигатель 1, включенный последовательно с управляемым вентилем 2, блок уг1раг Ле 1ия 3, выходом соединенньп с управляющим электродом унрйвляемого вентиля 2, эадатчик, источник 4 питания и цепь 5 обратной связи, C le aiFiemiyK) с двигателем и входом блока упряп.ттения, а также суммирующий интегратор 6. Цепь обратной снязи 1м,и1опнена в виде двух каналов положительной и отрицательной обратной связи, подключенных соответственно к обмотке 1 . 2 возб ткдения и обмотке 1,1 як оря двигателя. Один вход суммирующего интегратора 6 соединен с каналами обратной связи, второй - с общим В1ЛЛОДОМ исл очника 4 питания и кепи обратной , а задатчик BianoHHefi в виде непременного резисто- jia 7, пог.1 с дов 1тсл1,но включенного в каня:1 обплтной связи.
м р Тпривод по фиг, 2, кроме того соегоит ит двух лиидов 8 и 9, после- д,оватсл.чо с. Г 1-И1О11олярно включенн1-1Х ьк жду п. :одом (ч ммирующего интегратора
6и канллами - ..обр ггной связи, при этом вывод 1Г гоч1П1ка 4 питания соеди 1гн с го Г Рг-ь: выводом обмотки
I. 2 возбухщения .
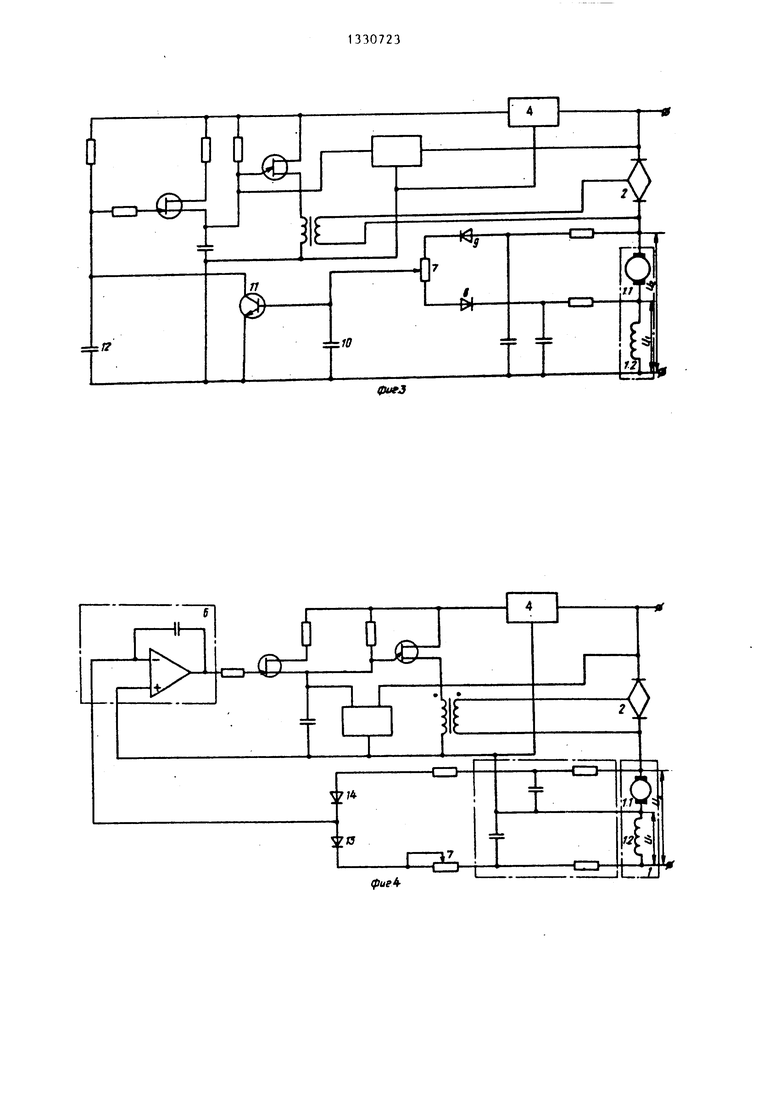
В tjTfK.Tpnnpifpirvi, по фиг.З дополнн- тельно BBC u.-i 1}1ипьтрующий конденсатор 10, а суммирующий интегратор 6 выполнен со схемой 11 определения знака (транзистор) с интегрирующим конденсатором 12, соединенным с входом схемы 11 определения знака и с общим выводом источника питания, при этом переменный резистор К1датчика включен меж.ау анодом и катодом диодов 8 и 9, а ползун неременного резистора
7задлтчика соединен с в ходом схемы
I1определения знака суммирующего ин- тег ратора 6 и через фильтрующий конденсатор 10 с общим выводом источника 4 питания,
ЭлектропривОлТ по фиг.4 дополнен двумя диодами 13 и 14, послед9ватель )о и разнополярно включенными между
двигателем и каналами 5 обрати и связи, при этом общий вывод источника 4 питания соединен с общей точкой обмотки 1.1 якоря и обмотки 1.2 возбуждения.
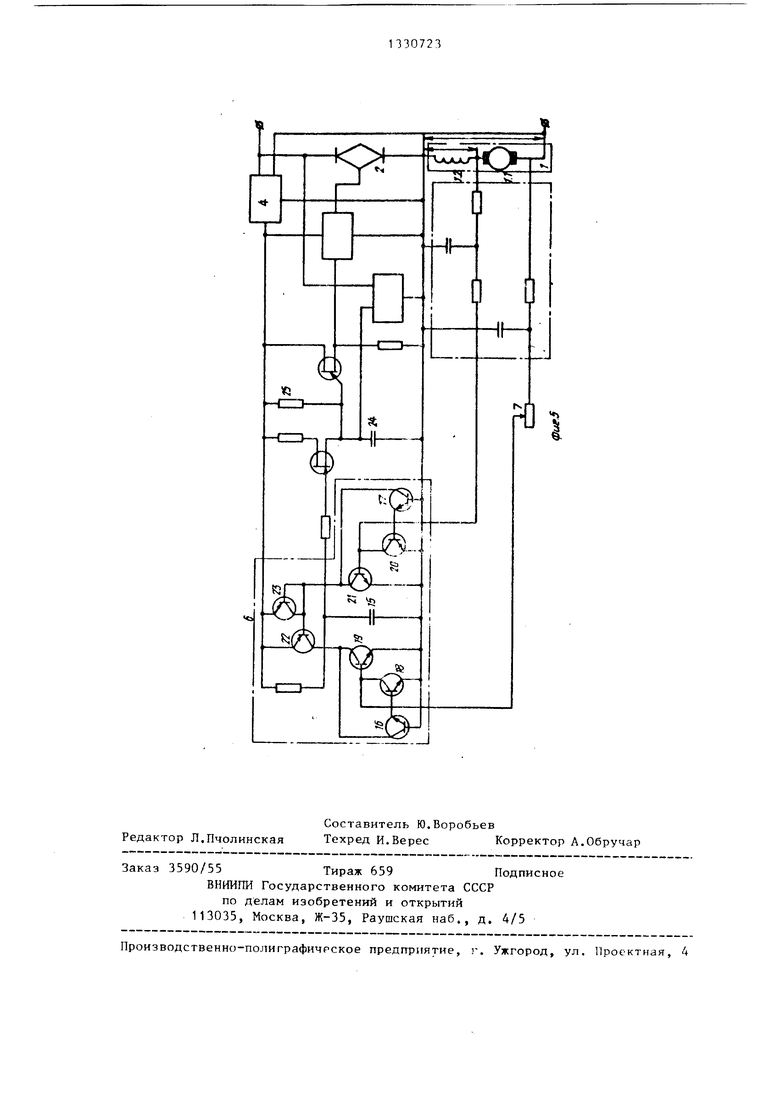
В электропривод по фиг.5 суммир то- щий интегратор 6 выполнен в виде конденсатора 15, двух токовых новторите- лей 16 и 17 и трех токовых зеркал (транзисторы 18 и 19, 20 и 21, 22 и 23), при этом входы и выходы первых и вторых TOKOBbtx повторителей 16 и 17 и токовых зеркал 18, 19 и 20, 21
5 соответственно попарно объединены, их входы соединены соответственно через переменный резистор 7 и непосредственно с каналами отрицательной и положительной обратной связи, а выQ ходы объединены и соединены с одной обкладкой конденсатора 15 соответственно непосредственно и через третье токовое зеркало 22,23. Общий вьшод источника 4 питания соединен с общей
Ь точкой соединения обмотки 1.2 возбуждения и катода управляемого вентиля 2. Вторая обкладка конденсатора 15 и о )1цие точки первых и вторых токовых повторителей 16,17 и токовых зеркал 18,19 и 20,21 соединены между собой и , зтим общим выводом, а общая точка третьего токового зеркала 22,23 соединена с выходом источника 4 питания.
Схема управления содержит фазо- сдвигающий конденсатор 24 и пусковой резистор 25.
Электропривод по фиг.1 работает следующим образом.
Цолзун переменного резистора 7 устанавливают в положение, определяющее необходимую скорость двигателя. Поскольку напряжение питания двигателя
и E+IRo,(1)
где Е - напряжение противоЗДС;
общее сопротивление двигателя (,, );
сопротивление обмотки якоря; сопротивление обмотки возбуждения;ток двигателя,
Е с1Ч
)ициент пропорциональности;частота вращения.
0
5
0
6
0
5
- «ftI где с О) - следовательно: U/ cIu -IRo,
f..
то са)-+ К„ или Wт.е, ско:i
рость шчп атрпя однозначно зависит от отношения напряжения питания к току двигателя.
При этом, задавая с помощью переменного резистора 7 определенное соотношение напряжений, снимаемых с двигателя и пропорциональных напряжению питания и току, можно задавать необходимую скорость двигателя.
Стабилизация скорости, заданной уставкой переменного резистора 7, обеспечивается в предлагаемом электроприводе следующим образом.
Так как , то для обеспечения постоянства скорости должно соблюдаться условие: U (сияК(,) или .
Умножая обе части равенства на k/, получают
k/U/-kk/I 0 или при
k Uy-kiU2 0(2)
При этом коэффициент k имеет размерность сопротивления. Установка ползуна переменного резистора 7 соответствует выбору величин коэффициентов k и k для эф Ьективных значений налряжения U и 1)2 в каналах положительной и отрицательной обратной связи, пропорциональных напряжению питания и току двигателя (U/ и 11 1-Rg ). Эти коэффифиенты определяются соотношением сопротивлений в каналах положительной и отрицательной обратной связи.
Условие (2) выполняет суммирующий интегратор 6, которьй имеет на выходе алгебраическую сумму напряжений обратной связи с учетом ее знака. Устройство управления изменяет фазу открытия вентиля 2, изменяя скорость электродвигателя в зависимости от изменений нагрузки.
1
В начальный момент, когда в цепи обратной связи нет напряжений, фазо- сдвигающий конденсатор 24 заряжается через пусковой резистор 25, величина которого подобрана из условия запуска двигателя на минимальных оборотах без нагрузки.
Электропривод, показанный на фиг.2, работает аналогично, но съем напряжений U и Ui осуществляется в разные полупериоды, а питание осуществляется от сети без выпрямителя.
+ по цепи отрицательной обрат- связи через резистор, диод и пе310723
Электропривод, покатпнньп на фиг.3, 1;аботает следующим образом.
При включении напряжения питания (транзистор 11 заперт, так как конденсатор 10 полностью разряжен) интегрирующий конденсатор 12 начинает заряжаться через резистор, при этом растет угол отпирания вентиля 2, бла1Q годаря чему обеспечивается плавньпт запуск двигателя. После запуска двигателя появляются напряжения в цепях положительной и отрицательной обратной связи. При этом в положительньп)
15 полупериод сетевого напряжения, конденсатор 10 заряжается током со знакомной ременный резистор 7. В отрицательный
2Q полупериод этот конденсатор заряжается током со знаком - по цепи положительной обратной связи через резистор, диод и переменный резистор 7. По прошествии нескольких периодов
25 на конденсаторе 10 устанавливается усредненное значение напряжения, пропорциональное разности зарядных токов. При отсутствии напряжений обратной связи конденсатор постепенно раз30 ряжается через цепи отрицательной и положительной обратной связи и через переход база - эмиттер транзистора 11. При этом, если на конденсаторе присутствует напряжение со знаком -, транзистор 11 заперт, а напряжение на интегрирующем конденсаторе 12 растет, вследствие чего увеличивается угол открытия вентиля 2 и, следовательно, скорость двигателя. После достижения скорости вращения, соответствующей уставке переменного резистора 7, в соответствии с условием (2) на конденсаторе 10 устанавливается нулевое напряжение. При дальнейшем
45 незначительном увеличении угла открытия управляемого вентиля 2 и скорости двигателя среднее значение тока на выходе цепи отрицательной обратной связи превышает среднее значение то- ка на выходе цепи положительной обратной связи, а напряжение на конден35
40
50
55
саторе 10 изменяет знак с . При этом срабатывает устройство определения знака - открывается транзистор 11, вследствие чего напряжение на интегрирующем конденсаторе 12 уменьшается, уменьшается угол отпирания управляемого вентиля и скорость вращения двигателя. При этом скорость
5 13
нрлщения двигмтеля устлнавливается блиэкой к рассчетио1 1 fi соотне 1 ствии и с устапк ой переменног о резистора 7 и условием (2). При изменении нагрузки на двигатель, например при ее увели- чении, скорость двигателя в первый момент времени уменьшается, а ток в цепи возрастает - возрастают напряже- mie и ток в цепи положительной обратной связи, усредненное напряжение на конденсаторе 10 устанавливается со знаком - - транзистор 11 закрывается, напряжение на интегрирующем конденсаторе 12 возрастает - увеличивается угол открытия симистора и двига- тель получает дополнительную мощное, гь, необходимую для восстановления заданной скорости вращения,.
В соответствии с условием (2) в устройстве управления устанавливается новая рабочая точка, обеспечивающая заданную скорость вращения двигателя при увеличенной нагрузке. При шении нагрузки процесс стабилизации скорости происходит аналогичным обра- зом: уменьшается ток в цепи двигателя - на конденсаторе 10 установится напряжение со знаком +, открывается транзистор 1 1 - 1еньшается угол от- тп- р,ян1ш упр.авляемог о вентиля 2 и мощ- ность, подводимая к двиг ателю. Таким образом, при любых изменениях нагрузки скорость (рлп е.мия двигателя пол- ,п,ерж :;ас: гся ттос 1 (..янной в соответствии yc . iuB ler-i (2) j( устанкоГ; керемеяно-
j-O 11СТИС .-мрЛ 7.
1)т1й1.:трог Ринод, показанный на фиг. 4 работает аналогично электроприводу, показ.чнному на фиг. 2, но съем напря- жешп U, и Uj . осуществляется в каждый гуолупериол,, «новременно, а питание - пс:ременньп током без выпрямления.
Электропринод, показанный на фиг. 5 работает ( те. ующкм образом.
При :г|,-гтнт екии конденсатор 15 начи- нает заряжаться через резистор и напряжение с конденсатора 1.5 поступает на схему управления. При этом начинается открытие управл. вентиля 2 и двигатель начинает вращаться, а со щеток двигателя снимаются напряжения обратно связи, соответствующие току и напряжению двигателя, которые поступают и соотношении, определяемом уставкой переменного резистора 7 на объеди; С 1ные входы токовых повторителей 16 и 17 и первого и второго токо- вьсх зеркал 16,19 и 20,21. На объединен выходах .11 их токовых зеркал
236
и токовых повторителей п: янл:1 i i токи, равные по величине вxoдFн.LM и с одинаковыми знаками. Напряжение, соответствующее току двигателя, инвертируется третьим токовым зеркалом 22,23, и модули токов вычитаются, а их разность с соответствующим знаком заряжает интегрирующий конденсатор 15, вследствие чего на вход схемы управления поступает интегральный сигнал рассогласования между фактической скоростью двигателя и уставкой переменного резистора 7. При этом изменяется угол открытия управляемого вентиля 2 в зависимости от величины и знака сигнала рассогласования, пока скорость двигателя не становится равной скорости, соответствующей уставке переменного резистора 7 с учетом некоторой погрешности, вног ямой зарядкой конденсатора 15 через резистор.
Теоретически в зтом случае разность токов равна нулю, а напряжение на конденсаторе 15 соответствует необходимому углу открытия угтравляемо- го чентиля 2.
При приложении к двигателю нагрузки увеличивается напряжение обратной связи, пропорциональное току двигателя (вследствие роста последнего) результате разность между токами на выходах второго и третьего токовы зеркал 20,21,22,23 становится отличной от нуля, напряжение на конде.чса- торе 15 увеличиваете., что (пиводит к увеличению угла oткp ilтия управляемого вентиля и увеличению скорости двигателя. Процесс продолжается до тех пор, пока напряжение на конденсаторе 15 не становится соответствующим новому значению нагрузки, а разность токов - нулю.
Двигатель, имеющий индуктивность, всегда дифференцирует сигналы обратной связи, вcJleдcтвиe чего необходимо интегрировать сигналы в цепях обратной связи с помощью конденсаторов и резисторов для формирования необходимых неискаженных сигналов. Благодаря тому, что вьсходы TOKOBLK зеркал 18, 19 и 20,21 соединены с выходами токовых повторителей 16 и 17, во-первых, получают сигналы в неискаженной форме на этих выходах, а во-вторых, обеспечивается возможность одновременного съема напряжений обратной связи в каждом полупериоде, что по1330723
рггг s лостоверностн сигналов связи и, в конечном счете, ч огре1лность при регулироваинение выходов повышает наэлектропривода.
ч де ми мо ко сх во ре ме зу со н ро вы
Формула изобретения
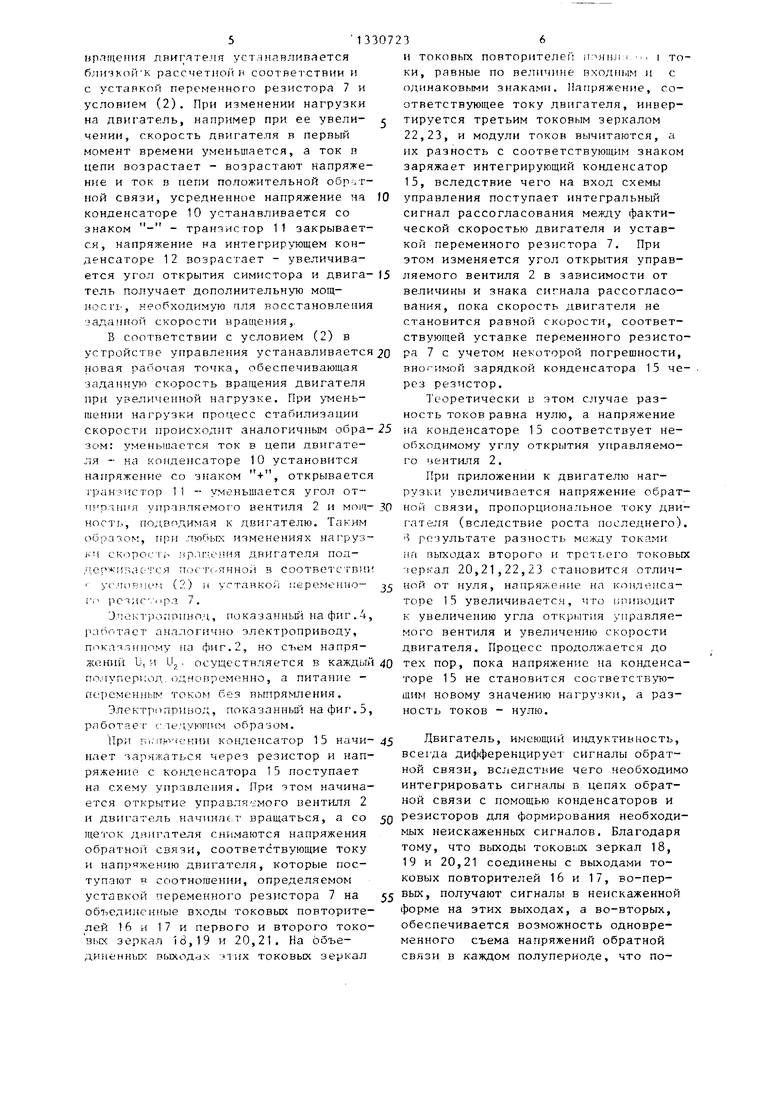
1.Электропривод, содержащий коллекторный двигатель, включенный последовательно с управляемым вeнтилfc блок управления, выходом соединенный с управляющим электродом управляемого вентиля, задатчик, источник, питания
и цепь обратной связи, соединенную с двигателем и входом блока управления, отличающийся тем, что, с целью повьппения надежности, в него введен суммирующий интегратор, цепь обратной связи выполнена в виде двух каналов положительной и отрицательной обратной связи, подключепных соответственно к обмотке возбуждения и якорю двигате,, при этом один вход суммирую1цего интегратора соединен с каналами обратной связи, другой - с общим выводом источника питания и цепи обратной связи, а задатчик выполнен в виде переменного резнето ра, последовательно включенного в канал обратной связи.
2.Электропривод по п.1, о т л к - ч а ю щ и fi с я тем, что в него введены два диода, последовательно и разнополярно включенные между входом суммирующего интегратора и каналами обратной связи, при этом общий вьгоод источника питания соединен с сетевьм
вьтодом обмотки возбуткдения .
8
ч
5
0
5
O
0
3.Электропривод по п.2, о т л л - ч л К1 щ и и с я тем, что в него введем: фильтрую)1ИЙ кондеисатгф, а сум- мигуютип интегратор выполнен со схе- мой определения эняка с интегрирующим конденсатором, соединенньи с выходом схемы определения знака и с общим выводом источника питания, при этом пе- ремонный резистор задатчика включен между анодом и катодом диодов, а ползун переменного резистора задатчик;л соединен с входом схемы определения нака суммирукчцего 1 нте ратора и че- роя фильтрующий конденсатор - с o6nuiM выяолтом источник. питания.
4.ЭлектропрИБод по п.1, о т л и - ч , i ю ГЦ и и с я трм, что сч мчирчтощий иятегратог. выполнен г виде конденсатора, ;;вух токовых повторителе) и трех токовых зеркал, при этом входы
и пьгходы первых и вторых токовых пов- торите:1ей и TOKOHI-IX зеркал соответственно попарно объ динены их входы соединены соответственно через переменный резистор заллтчика и непосредственно с каналами отрицательной и попожи 1 ельной обратной связи, а вы- холы объединены и соединены с одной оОкладкой конденсатора ст;- тчет ; венн : |епосредственно и через третье токо- В(Ч зеркало, общий яывод источника питянпя соедине- с общей точкой сое- дин ия обмоткт; ,r;efiHH и катода упрач;гяемого вентиля, второй ооклад-- кой конденсатора и общими точками первых и вторых токовых повторителей и токовых зеркал, а общая точка третьего токового зеркала соединена с выходом источника питания.
ter
(puf.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1981 |
|
SU986283A1 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
| Электропривод | 1983 |
|
SU1136287A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Устройство для управления двигателем переменного тока | 1978 |
|
SU782117A1 |
| Электропривод | 1982 |
|
SU1051677A1 |
| Устройство для токовой защиты коллекторного электродвигателя | 1991 |
|
SU1778855A1 |
| Измерительный преобразователь активной мощности | 1989 |
|
SU1659890A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
Изобретение относится к электротехнике и может быть использовано для регулирования скорости электродвигателя. Целью изобретения является повышение надежности. В устройстве цепь обратной связи выполнена в виде двух каналов, подключенных соответственно к обмотке возбутвдения 1.2 и к обмотке якоря 1.1. Один вход суммирующего интегратора 6 соедине) с каналами обратной связи, другой - с общим вьшо- дом источника цитания 4 и цепи обратной связи. В данном устройстве обеспечивается возможность одновременного съема напряжений обратной связи в каждом полупериоде, что ведет к снижению погрешности при регулировании. 3 3.п. ф-лы, 5 ил. (Л Ц)и2.1
| Патент США № 3165688, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Электропривод | 1982 |
|
SU1051677A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
