30
Изобретение относится к транспортному мгшиностроению и может быть использовано для проверки и рб гулиров- ки углов установки управляемых колес . автотранспортных средств на барабанных стендах, принцип действия кото -- рык основан на измерении величины и направления действия боковых сил в контакте управляемых колес с опорной товерхностью барабанов.
Целью изобретения является повышение точности проведения испытаний о
На чертеже показана структурная схема предлагаемого стенда . Is
Стенд содержит электродвигатели 15 связанные посредством цепных пере дач 2 с приводными барабанами 3, Осе- вое перемещение измерительных барабанов 4 обеспечивается специальной 20 конструкцией подпгапников 5, а усилие при их перемещении воспринимается упругими элементами 6 датчиков 7 усилий, каждый из выходов которых соединен с соответствующими входами ин 25 теграторов 8 и 9,, выходы которых связаны с одним из входов сумматора Ю; выполняющего операцию вычитания боковых сил с учетом знаков, и сумматора 115 служащего для определения направления действия измеренной боковой силы, а также с входами выпрямителей 12 и 13. Каждый из выходов выпрямителей 12 и 13 через нормально замкнутые контакты 14 и 15 компаратора 16 соединен с входом третьего 35 сумматора 17, выход которого через нормально разомкнутый контакт 18 ре- ле 19 времени соединен с входом указателя 20 величины боковой силы. Выход первого сумматора 10 соединен с входом индикатора 21 знака суммарной боковой силы, а. выход второго сумматора 1 связан с входами указател55 22 положения управляемых колес и компаратора 16, выход которого соединен с входом реле 19 времени„ После установки автомобиля управляемыми колесами на барабаны 3 и 4 стенда оператор включает электродвигатеши I г, которые с помощью цепных передач 2 при- 50 водят во вращение приводные барабаны 3, При установившемся режиме движения автомобиля на стенде возникают боковые силы Рд и Р. в контакте левого и правого колес.с барабанами. 55 стенда Эти силы стремятся переместить- вдоль оси измерительные барабаны 4. Ёозмо шость перемещения обеспечивается специальной конструкцией подШ1ПНИКОВ 5. Перемещение барабанов воспринимается упругими элементами 6 датч иков 7 усилий, выходные сигналы которых усредняются во времени интеграторами 8 и 9. Выходные сигналы датчиков 7 усилий 5 пропорциональные усредненной боковой силе, поступают на вход сумматора 11, который выполняет операцию вычитания с учетом знаков Р и РП, т.е. )-аРг,). Эта величина индицируется стрелочным указателем 22, на щкале которого симметрично относительно нуля отмечен сектор, в который оператор при диагностировании должен.с помощью поворотов руля установить и выдерживать в таком положении стрелку указателя 22, Направление поворотов руля должно быть противоположньгм отклонению стрелки указателя 22 относительно нулевой отметки. Таким образом, обеспечивается режим измерения
О |ДР ildP,
(1)
где d РА - максимально допустимая разница между Р и РП. При соблюдении неравенства (1),- т о е. при прямолинейном движении автообиля, нормально разомкнутые контак- ты 14 и )5 Koi-шаратора 16 замыкаются сигналы пропорциональные |Рд| и |Р„|, полученные с помощью выпрямителей 12 и 13J поступают на вход сум-;. матора 17, который обеспечивает вычисление боковой силы 5 ° выражению
iPuLlJluL
(2)
Выражение р;ля вычисления Pj принято исходя из того, что Р,-i-Pj,const, при прямолинейном или близком к нему движении автомобиля, Тое« при выполнении оператсфом условия (1) Одновременно с замыканием контактов 14 и 15 включается: реле 19 времени, которое через вреьш t (с) с помощью своего нормально разомкнутого контакта 18 подключает к выходу сумматора 17 цифровой указатель 20 величины боковой силы PeJfe 19 времени служит для повьшения точности измерения за счет усреднения измеренных значений боковой силы, в течение времени t. Выдержка в реле 19 времени выбирается из условия обеспечения за время измерения не менее десяти оборотов управляемых колес автомобиля. Сумматор 10 и индд катор 21 знака суммарной, боковой СШ1Ы служат для определения
313321
направления действия измеренной боковой силы.
Компаратор 16 слузкит для исключения влияния ошибочных действий-опе- ратора (нарушение.неравенства (1), т.е. неточное удержание руля в положении прямолинейного движения и выход стрелки указателя поворота руля из сектора) на результат измерения.
10
Интеграторы 8 и 9, выпрямители 12 и 13, сумматоры 10, 11 и 17, компаратор 16 и реле 19 времени могут быть выполнены на базе операционных усилителей.
Формула изобретения
Стенд для определения углов установки управляемых колес транспортного средства, содержащий беговые барабаны, кинематически связанные с приводом, измерительные барабаны.
5
0
794
подвижные в осевом направлении, с датчиками усилия и измерительное устройство, отличающийся тем, что, с целью повышения точности проведения испытаний, измерительное устройство выполнено в виде двух интеграторов, входа которьпс соединены с датчиками усилий а выходы каждого из них - с входами первого и второго сумматоров и с входом соответствующего выпрямителя, выход первого сумматора соединен с индикатором знака суммарной боковой силы, а второго сумматора - с указателем положения управляемых колес н через компаратор - с реле времени, а выходы выпрямителей через нормально открытые контакты компаратора соединены с входами третьего сзгмматора, выход которого через нормально открытый контакт реле времени соединен- с входом указателя величины боковой силы.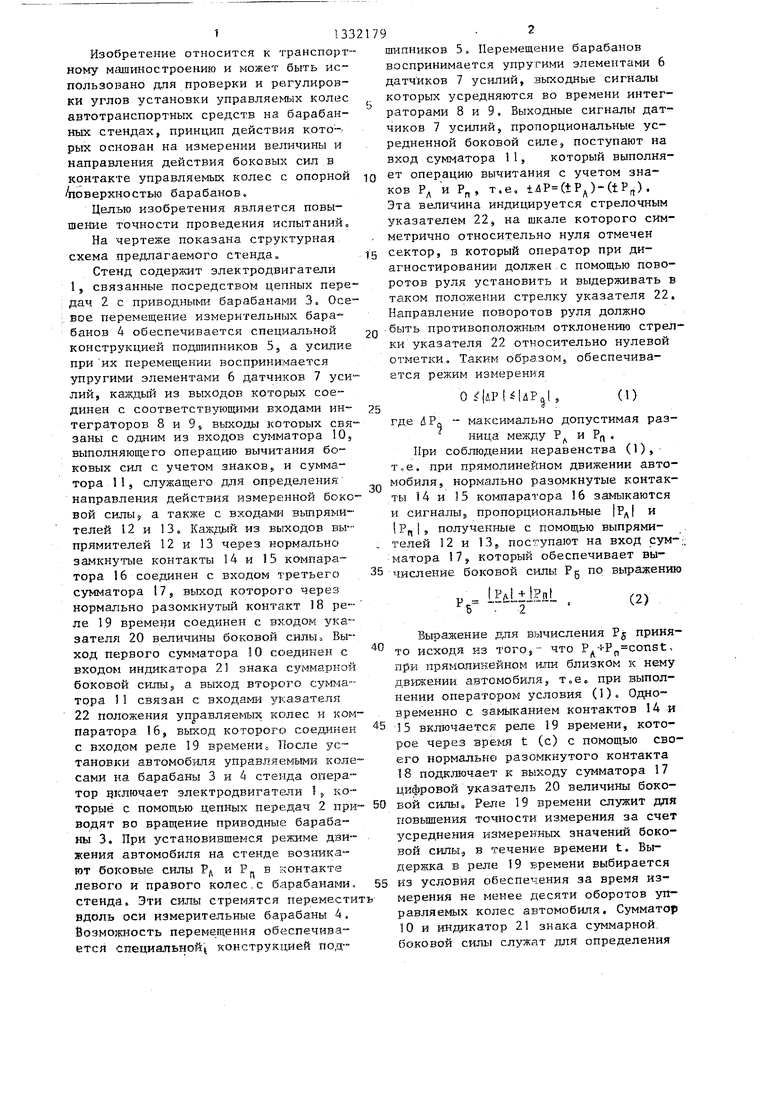

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания тормозов автомобиля | 1975 |
|
SU660873A1 |
| Стенд для испытания тормозов автомобилей | 1987 |
|
SU1499143A1 |
| Стенд для проверки параметров рулевого управления транспортного средства | 1986 |
|
SU1332178A1 |
| Стенд для проверки и регулировки углов установки управляемых колес транспортного средства | 1987 |
|
SU1428980A1 |
| Стенд для испытания тормозов автомобилей | 1982 |
|
SU1058814A1 |
| Стенд для контроля и измерения тор-МОзНыХ пАРАМЕТРОВ АВТОМОбиля | 1979 |
|
SU821264A1 |
| Стенд для контроля ширины колеи и сходимости направляющих колес трактора | 1987 |
|
SU1418598A1 |
| Стенд для испытания тормозов автомобиля | 1987 |
|
SU1422062A1 |
| Стенд для испытания транспортных средств | 1980 |
|
SU918811A1 |
| Устройство для поточной сортировки короткозамкнутых роторов асинхронных двигателей | 1989 |
|
SU1661694A1 |
Изобретение относится к транспортному машиностроению и может быть использовано для проверки и регулировки углов установки управляемых. колес автотранспортных средств. Цель- повьшение точности проведения испытаний. После установки автомобиля управляемыми колесами на барабаны 3 и 4 стенда оператор включает электродвигатели 1, которые с помощью цеп- ньк передач 2 приводят во вращение приводные барабайы З.-При установив- гаемся режиме движения автомобиля на стенде возникают боковые силы Рд и Р в контакте левого и правого колес с барабанами стенда. Эти силы стремятся переместить вдоль оси измерительные барабаны 4. При прямолинейном движении автомобиля нормально разомкнутые контакты 14 и 15 компаратора 16 замыкаются и сигналы, пропорциональные Рд и PJ,, полученные с по.- мощью вьшрямителей 12 и 13, поступают на вход сумматора I7, которьШ обеспечивает вычисление боковой силы Р . 1 ил. (Л
| Авторское свидетельство | |||
| Стенд для проверки углов уста-НОВКи упРАВляЕМыХ КОлЕС ТРАНСпОРТ-НОгО СРЕдСТВА | 1979 |
|
SU819608A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
