I1
Изобретение относится к задаюп им устройствам дистанционных копирующих манипуляторов и может быть использовано в машиностроении.
Цель изобретения - обеспечение удобства эксплуатации,
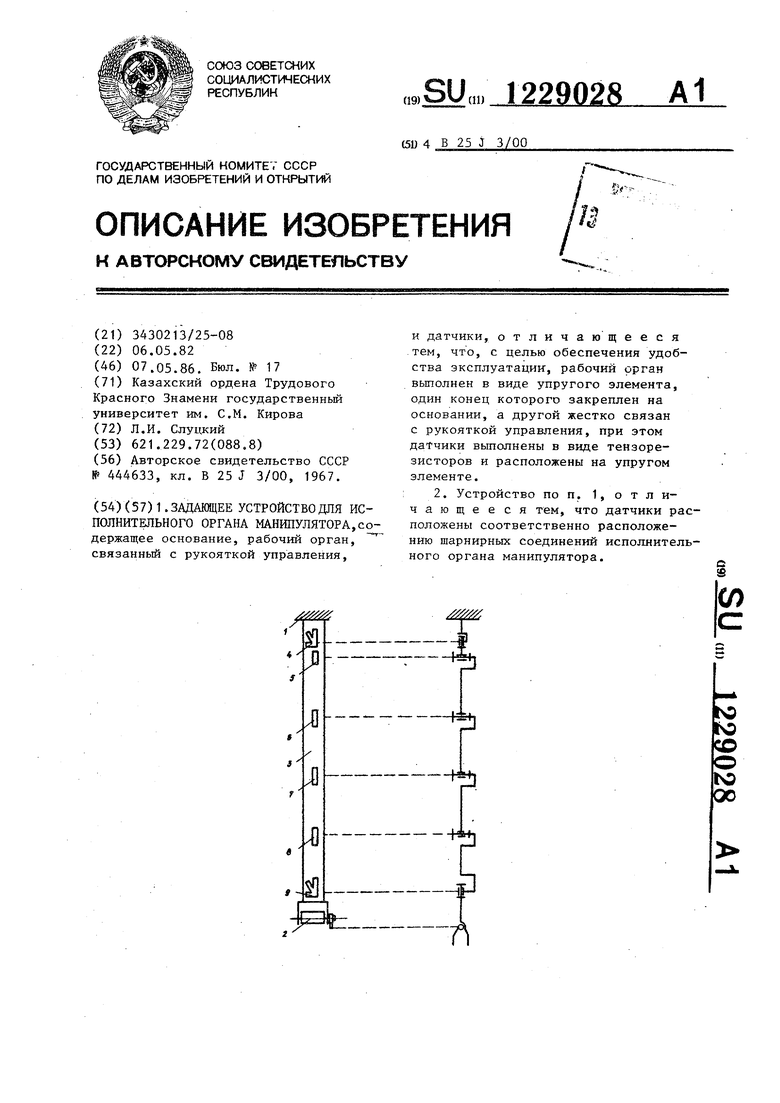
На чертеже схематически изображено задающее устройство и его связь с исполнительным органом манипулятора.
Задающее устройство содержит основание 15 рукоятку 2 управления и рабочий орган. Последний выполнен в виде плоской пружины 3, один конец которой закреплен на основании., а другой жестко связан с рукояткой.
Кроме того, задаюш;ее устройство содержит датчики 4-9 выполненные в виде тензорезисторов и расположенные на пружине на уровнях, соответствующих расположению шарнирньпс соединений исполнительного органа манипулятора. При шарнире, обеспечивающем качательное движение исполнительного органа, датчики 5-8- расположены вдоль пружины, а при шарнире, обеспе чивакяцем поворот, используют датчики 4 и 9. Для повышения точности задаРедактор Н, Тупица
Составитель Ф, Майоров
Техред ВЛ-СадарКорректор А.Ференц
Заказ 2405/12 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва5 Ж-35, Раушская наб,, д„ 4/5
Производственно-полиграфическое предприятие,, г, Ужгород, ул. Проектная, А
290282
ния управляюш.их сигналов датчики размещены с обеих сторон пружины, а пара датчиков одного уровня подключена к мостовой схеме„
5 Задающее устройство работает сле- дуюшим образом.
Оператор захватывает рукоятку 2 и придает пружине 3 определенную пространственную конфигурацию таким
to образом, чтобы исполнительный орган, вписавшись в получившуюся упругую линию (в масштабе), занял требуемое положение, Изгибные деформации пружины используют при этом для зада15 ния углов качания, а деформации кручения - для задания углов поворота в соответствующих шарнирах исполнительного органа.
20 Задающее устройство обеспечивает управление копирующими манипуляторами с различной кинематикой. Для этого оно может быть снабжено дополнительными наборами тензодатчиков по
25 длине плоской пружины, которые подключаются по мере необходимости, т.е. при изменении кинематики исполнительного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Задающее устройство для исполнительного органа манипулятора | 1986 |
|
SU1335443A2 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| КОМПЛЕКС УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2018 |
|
RU2710290C1 |
| Манипулятор | 1986 |
|
SU1349996A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Задающее устройство копирующего манипулятора | 1986 |
|
SU1333566A1 |
| Манипулятор | 1972 |
|
SU444633A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
