Изобретение относится к атомной , энергетике, может быть использовано в дистанционных системах управления копирующих манипуляторов и является усовершенствованием известного устройства по авт. св. № 1229028.
Цель изобретения - расширение функциональных возможностей за счет обеспечения перемещенир исполнительного органа по сложным траекториям.
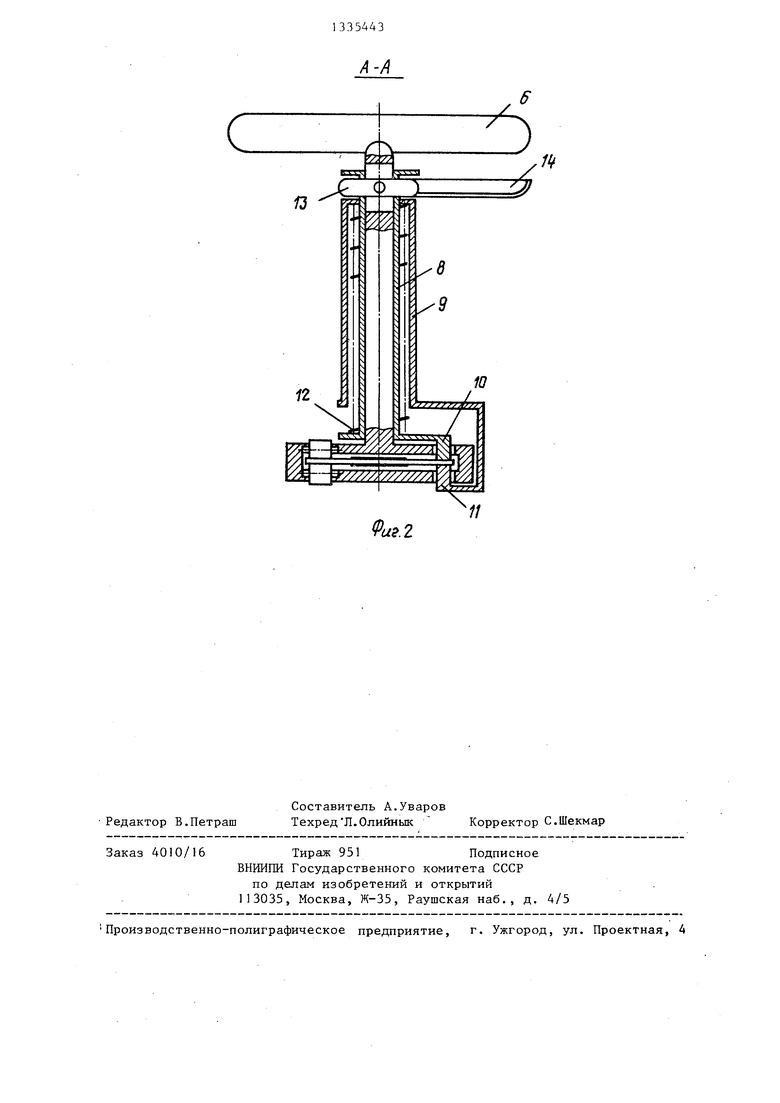
На фиг.1 показано задающее устройство с дополнительной подвижной кареткой и с дополнительной рукояткой управления; на фиг.2 - разрез А-А на фиг..
Задающее устройство состоит из основания 1, рукоятки 2 управления и упругого элемента 3 в виде плоской пружины, один конец которой жестко связан с основанием 1 ,. другой - с рукояткой 2 управления. На упругом элементе 3 расположены датчики-тензо- резисторы 4 на уровнях, соответствующих расположению шарнирных соедине- НИИ исполнительного органа манипуля- и размещена дополнительная подвижная каретка 5.
Каретка 5 выполнена в виде четырехосной тележки, на которой размещена дополнительная рукоятка 6 управления. С последней связано фиксирующее устройство 7, выполненное в виде телескопических штоков 8 и 9 с прижим10
Если нет воздействия со стороьгы оператора на рычаг 14, то под действием пружины 12 прижимные губки 0 и 11 телескопических штоков 8 и 9 прижимают упругий элемент 3, тем самым препятствуя свободному перемещению дополнительной каретки 5. В этом положении дополнитепьной каретки 5 Оператор двумя рукоятками 2 и 6 управления придает упругому элементу 3 необходимую форму, при этом исполнительный орган манипулятора принимает аналогичное положение.
При необходимости получения другого положения исполнительного органа манипулятора оператор поворачивает второй рычаг 14 дополнительной рукоятки 6 управления, рычаг 13 поворачивается на тот же угол, под его действием прижимные губки IО и 11 телескопических штоков 8 и 9 разжимаются. При этом оператор легко может переместить дополнительную каретку 5 по 25 упругому элементу 3 в новое положение, где он ее фиксирует опусканием рычага 14 и придает упругому элементу 3 требуемую форму.
15
20
30
Формула изобретения
I
Задающее устройство для исполнительного органа манипулятора по авт. св. № 1229028, отличающееся тем, что, с целью расшире- ными губками 10 и 1. Телескопические . ция функциональных возможностей за щтоки 8 и 9 кинематически связаны меж- счет обеспечения перемещений исполнн- ду собой посредством пружины 12 и ры- тельного органа по сложным траекто- чага 13, расположенного на дополнительной рукоятке 6 унравления. С осью
риям, на упругом элементе размещена дополнительная подвижная каретка с
рычага 13 жестко связан второй рычаг 14.
Устройство работает следующим образом.
Если нет воздействия со стороьгы оператора на рычаг 14, то под действием пружины 12 прижимные губки 0 и 11 телескопических штоков 8 и 9 прижимают упругий элемент 3, тем самым препятствуя свободному перемещению дополнительной каретки 5. В этом положении дополнитепьной каретки 5 Оператор двумя рукоятками 2 и 6 управления придает упругому элементу 3 необходимую форму, при этом исполнительный орган манипулятора принимает аналогичное положение.
При необходимости получения другого положения исполнительного органа манипулятора оператор поворачивает второй рычаг 14 дополнительной рукоятки 6 управления, рычаг 13 поворачивается на тот же угол, под его действием прижимные губки IО и 11 телескопических штоков 8 и 9 разжимаются. При этом оператор легко может переместить дополнительную каретку 5 по 5 упругому элементу 3 в новое положение, где он ее фиксирует опусканием рычага 14 и придает упругому элементу 3 требуемую форму.
5
0
30
Формула изобретения
I
Задающее устройство для исполнительного органа манипулятора по авт. св. № 1229028, отличающееся тем, что, с целью расшире ция функциональных возможностей за счет обеспечения перемещений исполнн тельного органа по сложным траекто-
риям, на упругом элементе размещена дополнительная подвижная каретка с
40 установленной на ней дополнительной рукояткой управления, имеющей рычаг, кинематически связан 1ый с фиксирующим устройством этой каретки.
в -9
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU514687A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| Задающий орган манипулятора | 1983 |
|
SU1088928A1 |
| Устройство для открывания и закрывания крышек люков железнодорожных полувагонов | 1989 |
|
SU1678677A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
Изобретение относится к атомной энергетике и может быть использовано в дистанционных системах управления копирующих манипуляторов. Целью изобретения является расширение функциональных возможностей за счет обеспечения перемещений исполнительного органа по сложным траекториям. Перемещая дополнительную подвижную каретку 5 за дополнительную рукоятку 6 управления в нужное положение, фиксируют последнюю на упругом элементе 3 фиксирующим устройством 7. Воздействуя на рукоятку 2 управления и дополнительную рукоятку 6 управления, придают упругому элементу 3 необходимую форму. При этом сигналы со сложнодеформированного упругого элемента 3, поступающие от .датчиков тензорезисторов 4, перемещают соответствующие шарнирные соединения ис- полнительного органа манипулятора. 2 ил. i (Л N) Фиг.1
Редактор В.Петраш
Составитель А.Уваров
Техред Л.Олийнык Корректор С.Шекмар
Заказ 4010/16
Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фа.г
| Задающее устройство для исполнительного органа манипулятора | 1982 |
|
SU1229028A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
