Изобретение относится к грузозахватным устройствам и может быть использовано в КОНСТРУК1Ц1ЯХ манипулято- ро.в и промышленных роботов.
Целью изобретения является повышение точности захвата деталей за счет регулирования и фиксадаи положения центра сферического шарнира захватного органа.
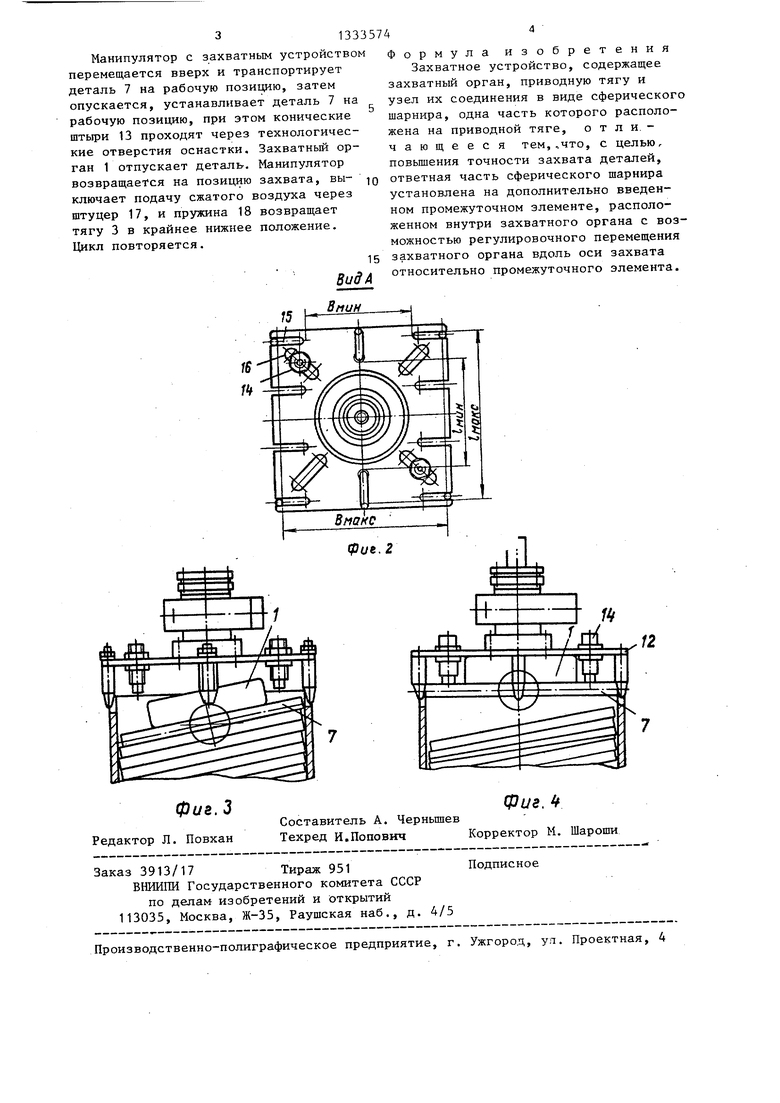
На фиг.1 приведено устройство, общий вид; на фиг.2 - вид А на фиг. 1 на фиг.З - положение захватного органа устройства перед захватом детали из магазинаi на фиг.4 - положение захватного органа устройства с деталью после захвата из магазина.
Захватное устройство содержит захватный орган 1, например электромагнит с рабочей поверхностью 2, тягу
3и узел их соединения, выполненный в виде сферического шарнира.
Одна часть шарнира расположена на тяге 3 и представляет собой полый . сферический сегмент 4. Ответная часть сферического шарнира образована на введенном в захватный орган устройства промежуточном элементе, состоящем из двух резьбовых втулок 5 и 6. Втулка 5 имеет внутреннюю сферичес кую поверхность, а втулка 6 - внутреннюю коническую поверхность. Резьбовое соединение втулок 5 и 6 с захватным органом 1 обеспечивает регуЛи- рование положения центра сферического ; шарнира и фиксацию его в центре пересечения горизонтальных осей симметрии захватываемой детали 7, проходящих через середину ее толщины, посредством втулки 5 и ограничение угла на- клона захватного органа 1 относительно вертикальной оси посредством втзш- ки 6.
В полости сферического сегмента
4установлен элемент точечного кон- такта с возможностью регулирования положения его точки контакта на вертикальной оси и фиксации ее в плоскости рабочей поверхности 2, выполнен ньм в виде резьбового конического упора 8 и контргайки 9. Тяга 3 выполнена в виде штока пневмоцилиндра.
Для закрепления устройства на исполнительном органе в верхней части тяги на корпусе 10 пневмоцилинд1 а ус- тановлен переходник 11 и дополнительно введенный в устройство узел механического ориентирования детали в процессе захвата, который состоит
из пластины 12, несущей конические штыри 13 и датчики 14 контроля положения детали. Последние установлены с возможностью регулирования и фиксации их положения в зависимости от габаритных размеров в диапазоне длины от 1„,„ до 1„с,1сс и ширины от Ьмин до . , а также конфигурации деталей, для чего в пластине 12.выполнены пазы 15 и 16. Штуцер 17 служит дл подачи сжатого воздуха в рабочую полость пневмоцилиндра и обеспечения вертикального перемещения тяги 3. Пружина 18 служит для возврата тяги 3 в исходное (крайнее нижнее) положение.
Устройство работает следующим образом.
После подачи очередной детали 7 на позицию захвата исполнительный орган, например манипулятор с захватным устройством, опускается. При этом захватный орган 1 под действием собственного веса взаимодействует своей рабочей поверхностью 2 с поверхностью детали, установленной наклонно, поворачиваясь вокруг центра сферического шарнира, образованного сферической внутренней поверхностью резьбовой втулки 5 и сферическим полым сегментом 4. В нижнем положении захватного устройства конический упор 8, установленньш в полости сегмента, опирается на плоскость детали а рабочая поверхность 2 устанавливается по плоскости детали. Захватный орган 1 захватывает деталь..Через штцер 17 в корпус 10 подается сжатьй воздух, при этом тяга 3 перемещается с захватным органом 1 плавно вверх, а захваченная деталь 7 своей торцово поверхностью начинает взаимодействовать со штырями 13, установленными своими образующими и 1линдрическими поверхностями по контуру ориентированого положения детали 7. В процессе перемещения деталь 7 посредством поворота захватного органа 1 вокруг ветикальной оси и сдвига относительно его рабочей поверхности 2 устанавливается в ориентированное горизонтальное положение. В конце перемещения захватный орган 1 взаимодействует с пластиной 12 и устанавливается горизонтально, а деталь 7 взаимодействуе с датчиками 14 контроля ориентированного положения детали.
31333574
анипулятор с захватным устройством Формула
Захватное у захватный орга узел их соедин шарнира, одна жена на привод чающеес повьшения точн ответная часть установлена на ном промежуточ женном внутри можностью регу захватного орг относительно п
перемещается вверх и транспортирует деталь 7 на рабочую позицию, затем опускается, устанавливает деталь 7 на рабочую позицию, при этом конические штыри 13 проходят через технологические отверстия оснастки. Захватньш орган 1 отпускает деталь. Манипулятор возвращается на позицию захвата, выключает подачу сжатого воздуха через штуцер 17, и пружина 18 возвращает тягу 3 в крайнее нижнее положение. Цикл повторяется.
Вид А Внин
изобретения Захватное устройство, содержащее захватный орган, приводную тягу и узел их соединения в виде сферического шарнира, одна часть которого расположена на приводной тяге, о т л и. - чающееся тем,,что, с целью, повьшения точности захвата деталей, ответная часть сферического шарнира установлена на дополнительно введенном промежуточном элементе, расположенном внутри захватного органа с возможностью регулировочного перемещения захватного органа вдоль оси захвата относительно промежуточного элемента.
tl /Д1 . .Г2
фиг.З
Редактор Л. Повхан
Фиг.
Составитель А. Черньшев
Техред И.Попович Корректор М. Шароши
Заказ 3913/17 Тираж 951
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, уп. Проектная, 4
Подписное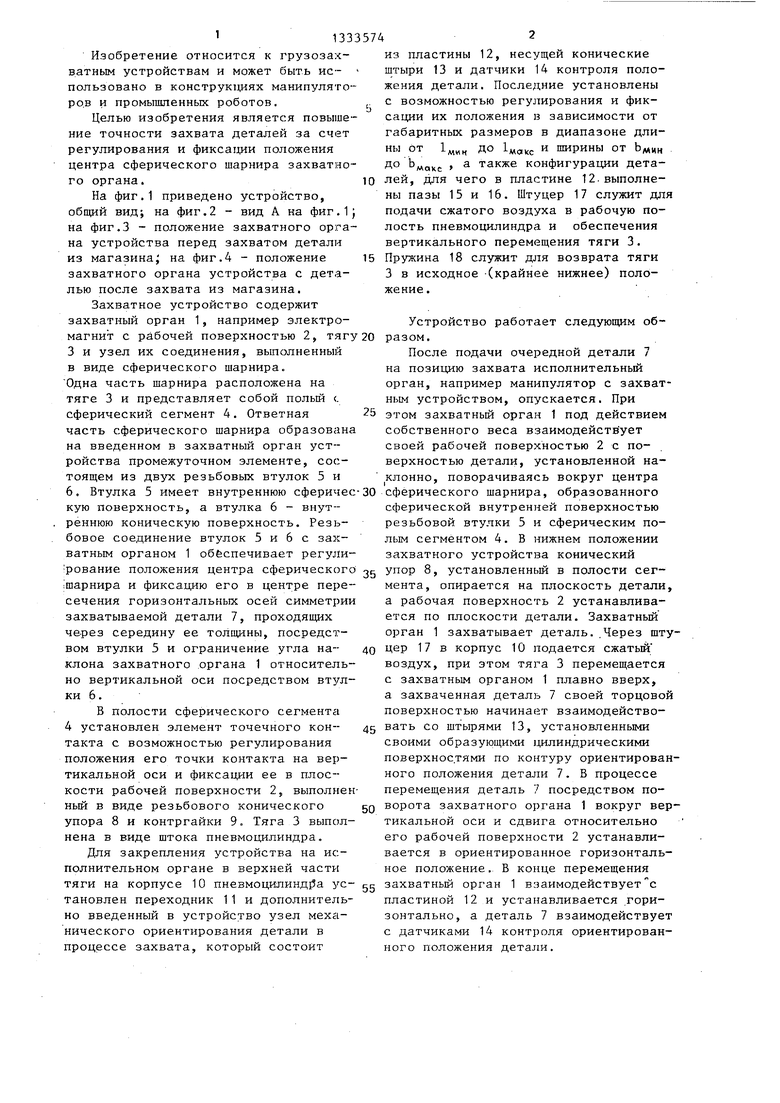
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1171310A1 |
| Загрузочный ротор | 1989 |
|
SU1602677A1 |
| Многооперационный сборочный центр | 1985 |
|
SU1271717A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Устройство для формовки выводов микросхемы и узел центровки микросхем для этого устройства | 2016 |
|
RU2644020C1 |
| Схват | 1983 |
|
SU1144878A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Загрузочное устройство | 1985 |
|
SU1256918A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
Изобретение относится к грузо- захватньм устройствам и может быть использовано в конструкциях манипуляторов и промьшшенных роботов. Целью изобретения является повьшение точности захвата деталей за счет регулирования и фиксации положения центра сферического шарнира захватного органа. Захватное устройство содержит захватный орган 1, например электромагнит с рабочей поверхностью 2, тягу 3 и узел их соединения, выполненный в виде сферического шарнира. Одна часть шарнира расположена на тяге 3 и представляет собой полый сферический сегмент 4. Ответная часть шарнира расположена на промежуточном звене, состоящем из двух резьбовых втулок 5 и 6. Резьбовое соединение втулок 5 и 6 с захватным органом 1 обеспечивает регулирование положения центра сферического шарнира относительно центра пересечения горизонтальных . осей симметрии захватываемой детали, проходящих через середину ее толщины. Тяга 3 выполнена в виде штока пневмоцилиндра привода захватного устройства. 4 ил. i (Л 10 00 оо со ел ; 13 8
| Захватное устройство | 1984 |
|
SU1171310A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
