Изобретение относится к автоматизации технологических процессов в лзашинострое- нии и может быть использовано для ориентации и нодачи деталей типа втулок из навала на позицию обработки или сборки.
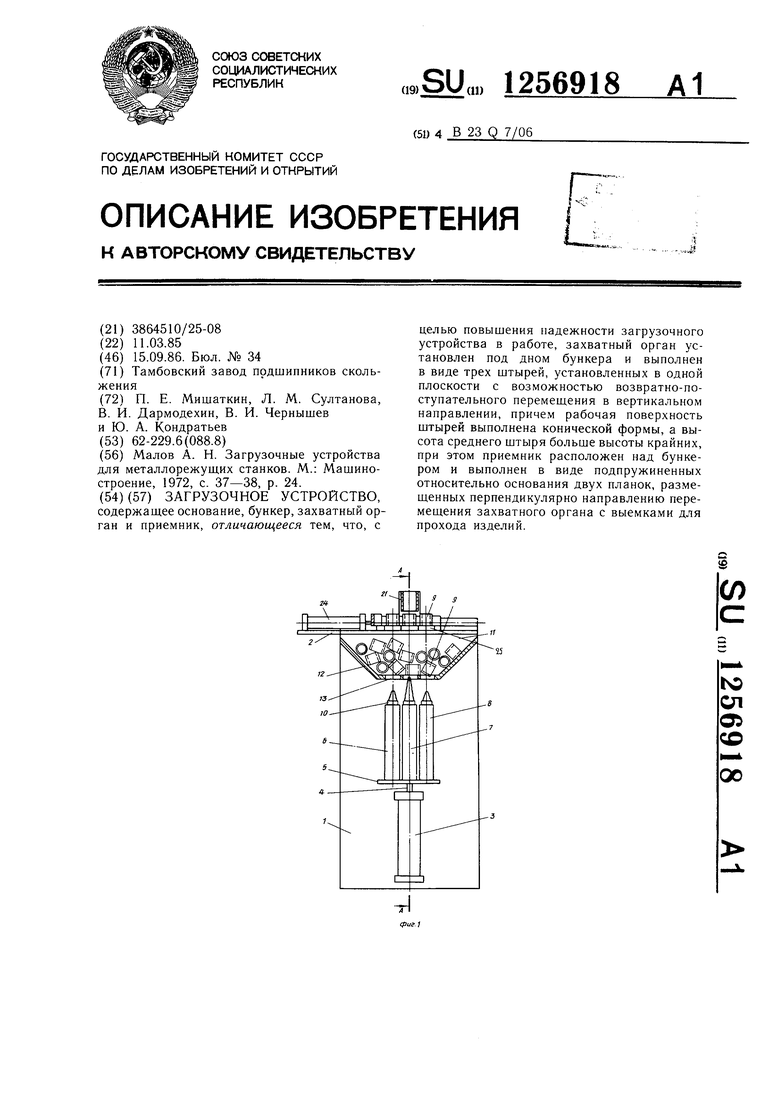
Целью изобретения является повышение надежности загрузочного устройства в работе при подаче деталей типа втулок в при- емпик путем принудительного съема их с захватных органов в приемнике без потери их ориентации.
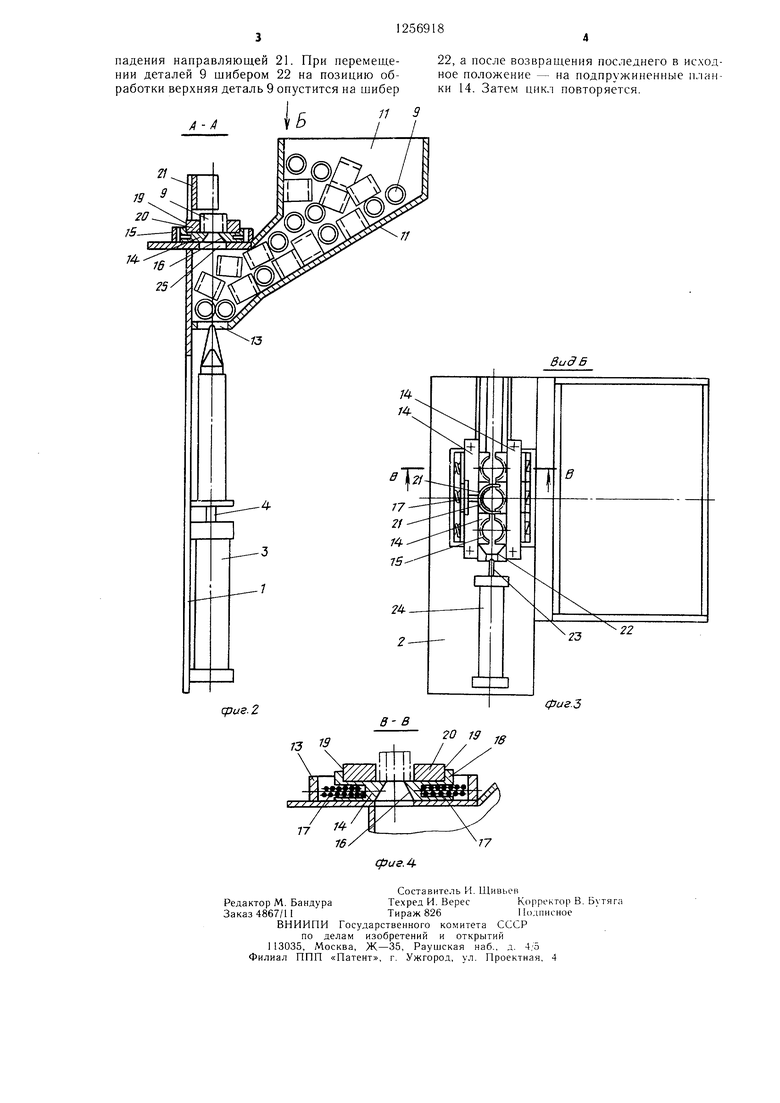
На фиг. 1 представлен предлагаемый механизм ориентации деталей, общий вид; на фиг. 2 - сечение А-А на фиг. 1; па фиг. 3 - вид Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 3.
Загрузочное устройство содержит оспова- пие, выполненное в виде вертика.1ьпой плиты I и горизонтальной плиты 2. На плите 1 установлен силовой цилиндр 3, на штоке 4 которого закреплен захватный орган, выполненный в виде планки 5, на которой в одной плоскости смонтированы три цилнпдрических штыря 6, 7 и 8 для захвата деталей 9 типа втулок (длиной ггримерно равной наружному диаметру).
Диаметр штырей 6, 7 и 8 выполнен меньше наружного диа.метра детали 9. Сверху они имеют головки цилиндрокопической формы со сферическими вершинами. Димаметр цили} дрической части головки выполнен меньше внутреннего диаметра детали 9, чтобы обеспечить свободное их надевание на головки. Сверху 1нтыри имеют кольцевые уступы 10 для оноры деталей 9, надетых на головки.
Длина головок п.ггырей 6 и 8 выполнена равной длине детали 9, а длина головки шты ря 7 выполнена равной длине двух деталей 9. Это сделано для того, чтобы при встрече штыря 7 с деталью 9, обращенной к нему цилиндрической поверхностью, обеспечить опрокидывание (поворот) и надевание ее на головку одного из соседних штырей 6-8.
Выше захватных орг анов на плите 1 установлен бункер П. Он имеет ковшеоб- разную нрямоугол1)11ого сечения форму. Загружается сверху деталями 9 навалом. В дне 12 бункера 11 выполнены отверстия 13 для прохода захватных органов с надетыми на них деталями 9 в бункер 11. Размеры (длина и ншрина) дна 12 бункера 11 выбраны такими, чтобы на нем могли разместиться одновременно не более трех деталей 9.
Над бункером 11 на горизонтальной плите 2 смонтирован приемник, выполненный в виде смонтированных на плите 2 двух ноднружиненных г ланок 14 с выемками 15 для прохода деталей 9, образующих отверстие менылего диаметра, чем деталь 9. Снизу выемки 15 имеют скосы 16 для захода и направления деталей 9 нри их подаче в них захватным органом.
Планки 14 подпружинены пружинами 17 и имеют выступы 18, служащие для ограничения передвижения их навстречу друг другу. Выступы 18 упираются в торцы 19, направляющие планки 20, образующие совместно с подпружиненными планками шток для приема деталей 9. Над направляющими планками 20 смонтирована направляющая 21,
Направляющая 21 предназначена для
удержания верхней детали 9 в случае надевания на головку штыря 7 двух деталей 9.
Она установлена на левой направляющей
планке соосно со штырем 7.
Между направляющими планками 20 установлен шибер 22, связанный со щтоком 23 силового цилиндра 24. В шибере 22 выполнено гнездо, которым он перемещает детали 9 на позицию сборки или обработки (не показано).
В горизонтальной плите 2 выполнены отверстия 25 соосно расположению штырей 6- 0 8 захватного органа и выемок 15, выполненных на подпружиненных планках 14, и смонтированы упоры 27 в виде П-об- разных планок для направления перемещения подпружиненных планок 14 и размещения пружин 17.
Загрузочное устройство работает следующим образом.
В бункер 11 навалом загружаются детали 9. Включается силовой цилиндр 3, шток 4 которого перемещает вверх планку 5 со
штырями 6-8. Последние, проходя через отверстия 13 в дне 12 бункера И, ворошат головками детали 9. Детали 9, надетые на головки штырей 6-8, перемещаются вместе с последними через отверстия 25 в горизонтальной нлите 2 и, действуя верхними торцами на скосы 16 выемок 15 нод- пружиненных планок 14, разводят их в стороны, сжимая пружины 17.
Как только детали 9 пройдут выемки 15, Q последние под действием пружин 17 заскочат под их нижний торец.
Силовой цилиндр 3 нереключается на обратный ход и возвращает штыри в исходное положение. При этом подпружиненные планки 14 под действием пружин 17 также 5 возвратятся в исходное положение, т. е. до упора выступов 18 в направляющие планки 20, а детали 9 останутся на верхних плоскостях подпружиненных планок 14 между направляющими планками 20.
0 Включается силовой цилиндр 24, который шибером 22 перемещает ориентированные детали 9 на позицию обработки. Силовой цилиндр 3 переключается на обратный ход и возвращает шибер 22 в исходное положение.
В том случае, если на штырь 7 были надеты две детали 9, то верхняя деталь 9, опираясь на нижнюю, будет удерживаться от
падения направляющей 21. При перемещении деталей 9 щибером 22 на позицию обработки верхняя деталь 9 опустится на шибер
22, а после возвращения последнего в исходное положение - на подпружиненные планки 14. Затем цикл повторяется.
А-А
W
77
77
Составитель И. Шивьсп
Редактор М. БандураТе.хред И. ВересКорректор В. Бутя га
Заказ 4867/1 1Тираж 82611одписиое
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб.. д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
фиг.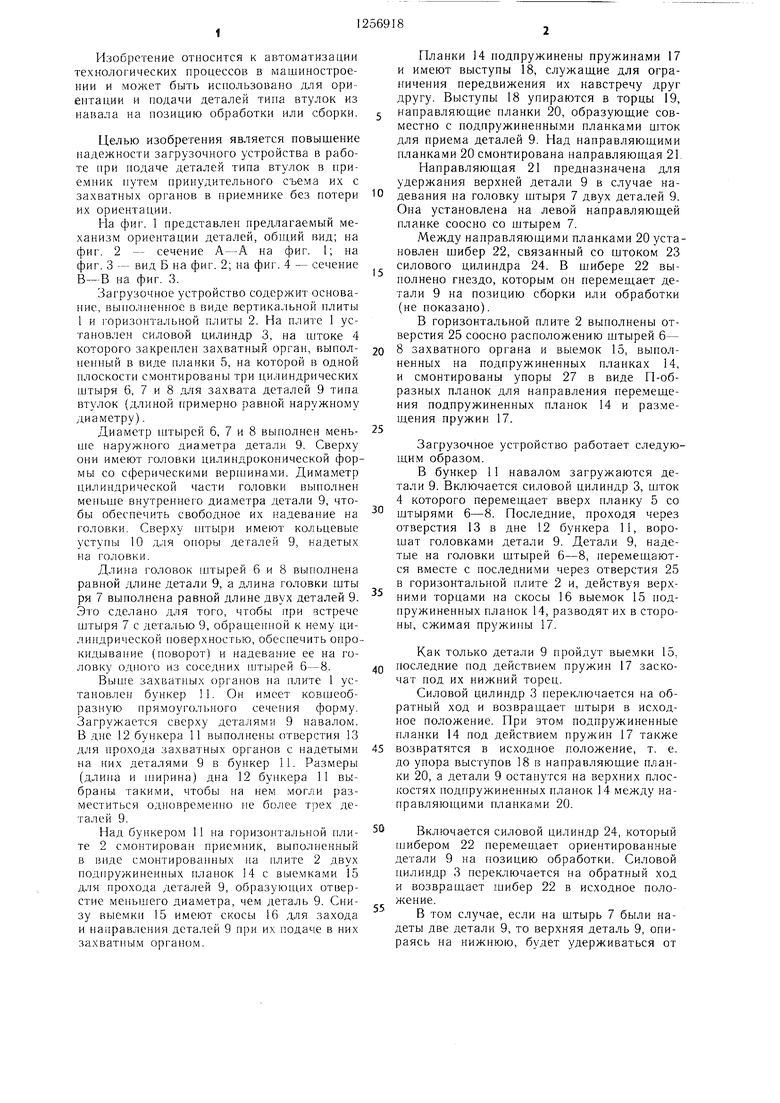
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| СТАНОК ДЛЯ УДАЛЕНИЯ ОБЛОЯ ФОРМОВЫХ РЕЗИНОВЫХИЗДЕЛИЙ | 1967 |
|
SU205269A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Устройство для сборки деталей запрессовкой | 1987 |
|
SU1581557A1 |
| Автомат для завинчивания шпилек | 1985 |
|
SU1355438A1 |
| Автомат для сборки трубного пакета радиатора | 1981 |
|
SU996162A1 |
| Установка для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1442300A1 |
| Устройство для поштучной подачи плодов | 1988 |
|
SU1644884A1 |
| Автоматическая линия для индукционной термической обработки плоских деталей | 1981 |
|
SU1018983A1 |
| Малов А | |||
| Н | |||
| Загрузочные устройства для металлорежуш.их станков | |||
| М.; Машиностроение, 1972, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
