Изобретение относится к машиностроению и может быть использовано в промышленных роботах.
Цель изобретения - упрощение конструкции за счет сокращения количества приводов при плоскопараллельном перемещении платформы.
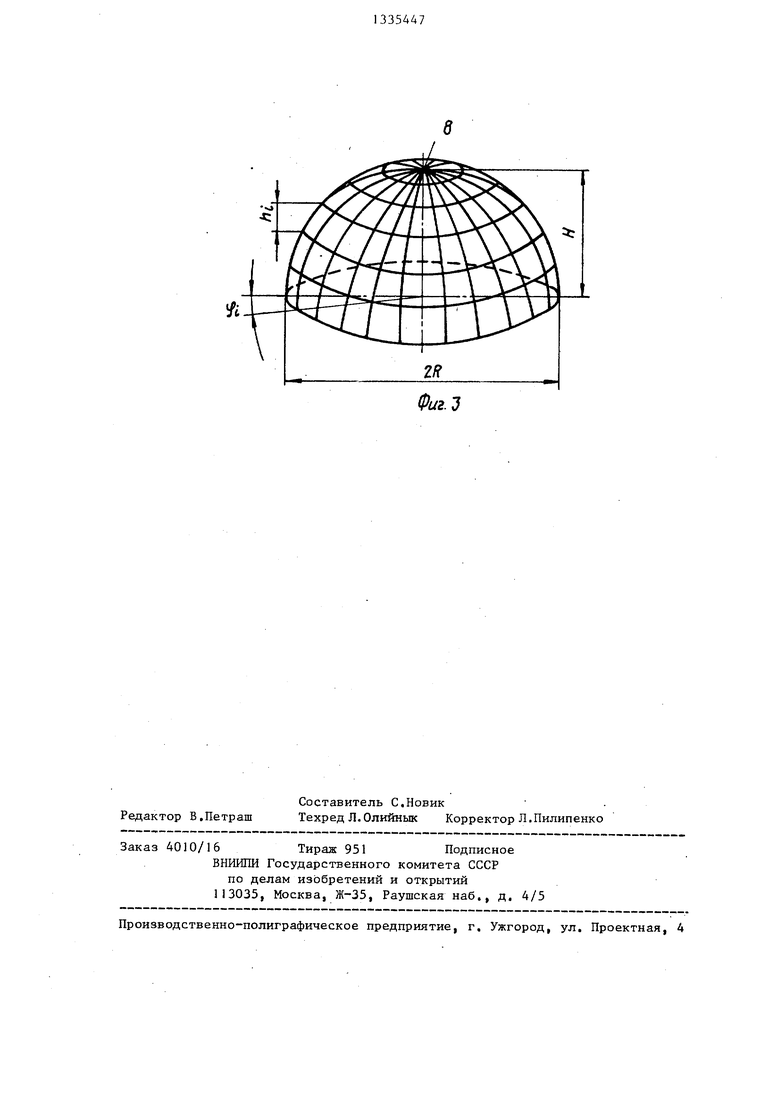
На фиг.1 показана кинематическая схема модуля промышленного робота; на фиг.2 - то же, при вьщвинутом штоке силового цилиндра; на фиг.З - рабочая зона.
Формула изобретения Модуль промышленного робота, соМодуль промышленного робота состоит из основания 1, подвижной платфор- 15 держащий основание, подвижную относимы 2, четырех элементов 3 стержнево- тельно него платформу, элементы стерж го типа, шарнирно связанных с основанием и платформой, поворотного диска 4 со следящим приводом 5 и основного следящего привода 6, выполненного в 20 виде силового цилиндра, корпус 7 которого шарнирно связан с геометрическим центром 8 платформы 2, а шток 9 - с периферией диска 4, Отработка угловых if. и линейных L. перемещений выходных элементов приводов отслеживается датчиками 10 и 11.
Модуль работает следу1«щим образом
невого типа, шарнирно связанные с основанием и подвижной платформой, и основной следящий привод, отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества приводов при плоскопараллельном перемещении платформы, основание снабжено поворотным диском 25 с дополнительным индивидуальным следя щим приводом, а основной следящий при
вод выполнен в виде силового цилиндра, корпус которого шарнирно связан с геометрическим центром подвижной
При подаче рабочего тела в силовод выполнен в виде силового цилиндра, корпус которого шарнирно связан с геометрическим центром подвижной
вой цилиндр и вьщвижении его штока 9 зо платформы, а шток - с периферией диска на величину L- происходит увеличе- основания.
133.5ДА72
ние расстояния L между шарнирами крепления этого цилиндра, что приводит к смещению геометрического центра 8 платформы 2 на величины R. и h.. При полном выдвижении штока 9 центр платформы смещается на величины R и Н, Поворот диска 4 на угол Lf. обеспечивает поворот платформы 2 на соответ- ствующий угол.
Формула изобретения Модуль промышленного робота, содержащий основание, подвижную относительно него платформу, элементы стерж
держащий основание, подвижную относительно него платформу, элементы стерж
невого типа, шарнирно связанные с основанием и подвижной платформой, и основной следящий привод, отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества приводов при плоскопараллельном перемещении платформы, основание снабжено поворотным диском с дополнительным индивидуальным следящим приводом, а основной следящий придержащий основание, подвижную относительно него платформу, элементы стерж
вод выполнен в виде силового цилиндра, корпус которого шарнирно связан с геометрическим центром подвижной
Редактор В.Петраш
Составитель С,Новик
Техред Л.Олийнык Корректор Л.Пилипенко
Заказ 4010/16 Тираж 951 Подписное ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
fc.J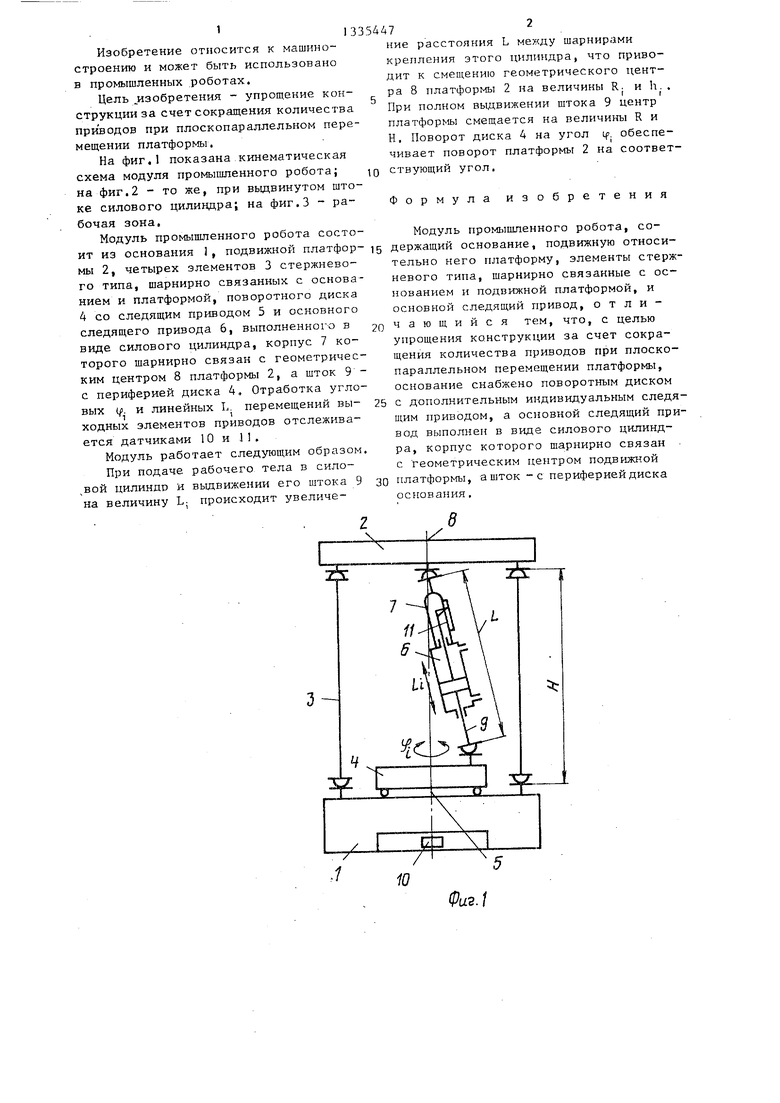
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2004 |
|
RU2263571C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2005 |
|
RU2297974C1 |
| Промышленный робот | 1983 |
|
SU1142270A1 |
| Промышленный робот | 1985 |
|
SU1281402A1 |
| Промышленный робот | 1988 |
|
SU1563965A1 |
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Промышленный робот | 1985 |
|
SU1293013A1 |
| Устройство для переноса заготовок | 1983 |
|
SU1100030A1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах. Цель изобретения - упрощение конструкции за счет сокращения количества приводов при плоскопараллельном перемещении платформы. При подаче рабочего тела в силовой цилиндр и выдвижении его штока 9 на величину L . происходит увеличение расстояния L между шарнирами крепления этого цилиндра, что приводит к смещению геометрического центра 8 платформы 2 на величины R; и h.. Поворот диска 4 на основании 1 на угол 1/. обеспечивает поворот платформы 2 на соответствующий угол. Отработка угловых if. и линейных 1 L. перемещений отслеживается датчиками 10 и 11. 3 ил.
| Устройство для перемещения исполнительного органа | 1983 |
|
SU1142271A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
