.цилиндров 1 о привода захватов с закрепленными на штоках кулачками 11. Платформа 6 со смонтированными на ней руками 4 с захватами. 5 установлена на колонне 2 с возможностью вращения вокруг нее.Разжим захватов 5 осуществляется цилиндрами 10,
1
Изобретение относится к области машиностроения и может быть использовано для автоматизации производственных процессов, связанных с обработкой штучных изделий.
Целью изобретения является повышение производительности робота за счет сокращения холостых ходов.
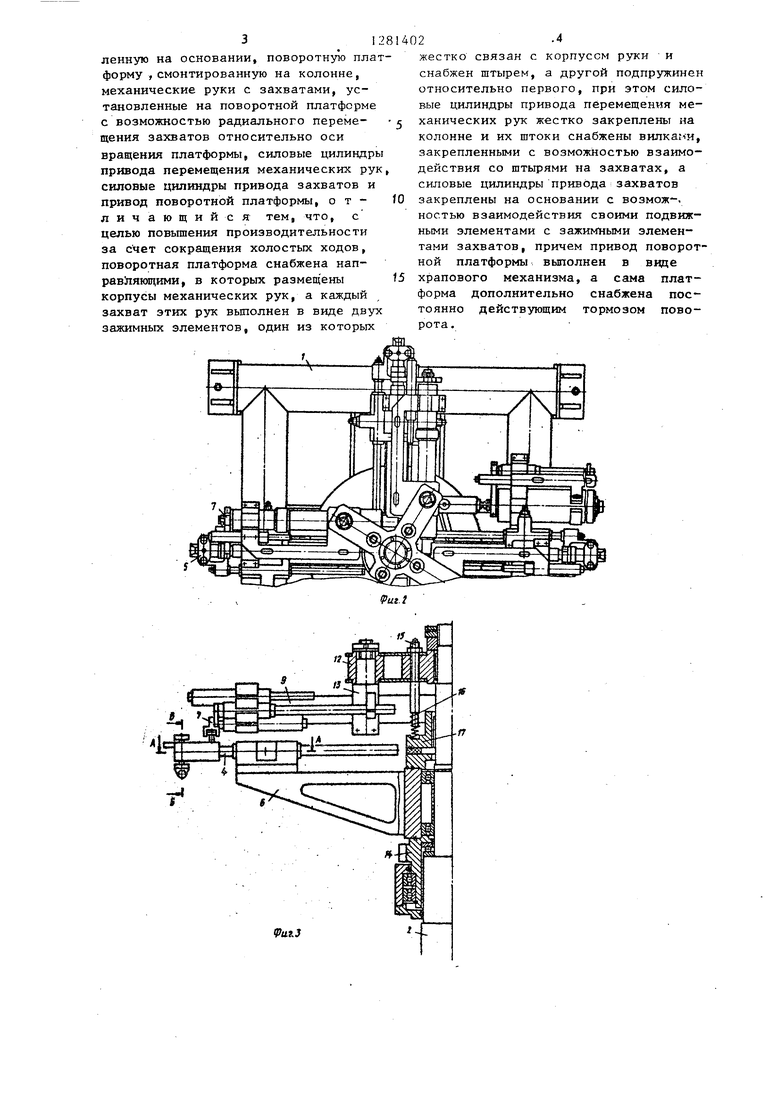
На фиг,1 показан робот, общий вид; на фиг, 2 - то же, вид сверху; на фиг.З - крепление силовых цилиндров привода перемещения механических рук и платформы на колоннеj а также рук на платформе; на фиг,4 - сечение А-А на фиг.З; на фиг,5,- сечение Б-Б на фиг.3,
Промышленный робот состоит из основания 1, колонны 2, привода 3 поворотной платформы, механических рук 4, захватов 5, поворотной платформы 6 в вилок 7, штырей 8 силовых цилиндров 9 привода перемещения механических рук, силовых цилиндров 10 привода захватов с закрепленными на их штоках кулачках 11,
На колонне 2 (фиг,3) неподвижно закреплена крестовина 12, на которой при помощи хомутов 13 закреплены цилиндры 9,- на штоках которых закрелены вилки 7,
Платформа 6 жестко соединена с храповым колесом 14 привода 3 пово- ротной платформы (водило и собачка храпового механизма не показаны), На крестовине 12 установлены винты 15, взаимодействующие через пружину 16 с колодкой ПОСТОЯННО действующего тормоза 17,
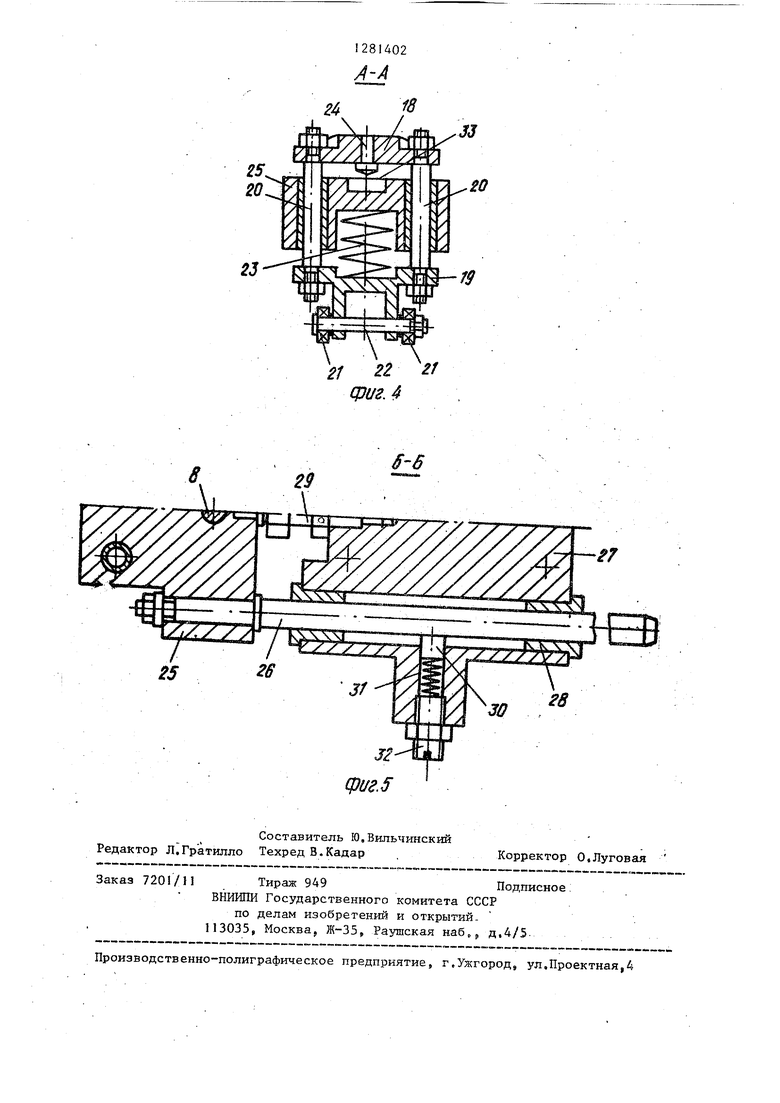
Захват (фиг,4) состоит из травер 18 и 19, колонок 20, роликов 21, закрепленных на оси 22, пружины 23 и прижима 24, Эти детали смонтированы на зажимном элементе 25, жестко
установленными на позициях загрузки и выгрузки. Радиальное перемещение рук 4 производится цилиндрами 9, жестко заг репленнымя на колоннах 2, штоки которых снабжены вилками 7, взаимодействующими штырями 8 на захватах, 5 ил,
5
0
5
0
5
0
связанном с двумя скалками 26, смонтированными в направляющих платформы 6р выполненных в виде основания 27 с втулками 28, В основании 27 размещен регулируемьй упор 29,
Рука снабжена двумя тормозами, состоящими из вкладьш1а 30, пружины 31 и винта 32, На элементе 25 закреплен штырь 8. Заготовка 33 прижимается прижимом 24 к элементу 25,
Робот работает следующим образом,
Цилиндр 9 через вилку 7, закрепленную на его штоке, и штырь 8, установленный на элементе 25, перемещает в радиальном направлении руку А, На позиции загрузки и выгрузки, когда рука 4 находится в крайнем вьщ- винутом положении, привод 10 поднимает вверх кулачок 11, который через ролики 21, колонки 20 траверсы 19 и 18 поднимает прижим 24, Этим самым освобождается заготовка, находящаяся в гнезде элемента 25, При этом пружина 23 сжимается. Когда кулачок 11 приводом 10 перемещается вниз, пружина, разжимаясь, через траверсы 18 и 19, колонки 20 и прижим 24 зажимает заготовку.
Поворот платформы 6 происходит, когда руки 4 сведены к центру, и осуществляется механизмом 3 поворота через храповое колесо 14, соединенное с платформой 6, При этом штырь, 8 выходит из зацепления с вилкой 7 цилиндра 9 привода руки на данной позиции и входит в зацепление с вилкой 7 цилиндра 9 перемещения руки на следующей позиции и т,д.
Формула изобретен и-я
Промыпшенный робот, содержащий основание, колонну, жестко закрепленную на основании, поворотную платформу , смонтированную на колонне, механические руки с захватами, установленные на поворотной платформе с возможностью радиального переме- щения захватов относительно оси вращения платформы, силовые цилиндры привода перемещения механических рук силовые цилиндры привода захватов и привод поворотной платформы, о т - личающийся тем, что, с целью повышения производительности за счет сокращения холостых ходов, поворотная платформа снабжена нап- рав ющимн, в которых размещ ены корпусы механических рук, а каждый захват этих рук вьшолнен в виде двух зажимных элементов, один из которых
жестко связан с корпусом руки и снабжен штырем, а другой подпружинен относительно первого, при этом силовые цилиндры привода перемещения механических рук жестко закреплены на колонне и их штоки снабжены вилкани, закрепленными с возможностью взаимодействия со штырями на захватах, а силовые цилиндры привода захватов закреплены на основании с возмож-. ностью взаимодействия своими подвижными элементами с зажимными элементами захватов, причем привод поворотной платформы выполнен в вице храпового механизма, а сама плат- Форма дополнительно снабжена постоянно действующим тормозом поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1563965A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Робот | 1988 |
|
SU1538994A1 |
| Манипулирующее устройство | 1985 |
|
SU1301633A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Стенд для испытания роботов | 1985 |
|
SU1281404A1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
| Манипулятор | 1985 |
|
SU1315299A1 |
| Промышленный робот | 1984 |
|
SU1301528A1 |
Изобретение относится к области машиностроения и.может быть использовано для автоматизации процессов, связанных с обработкой штучных изделий. Прго енение изобретения позволяет повысить производительность робота. Промьшшенный робот состоиТ из основания Г, колонны 2,мех&низма . поворота 3j рук 14, пружинньпс захватов 5, платформы 6, вилок 7, штырей 8, силовых цилиндров 9 привода перемещения механических рук, силовых W Фиг. i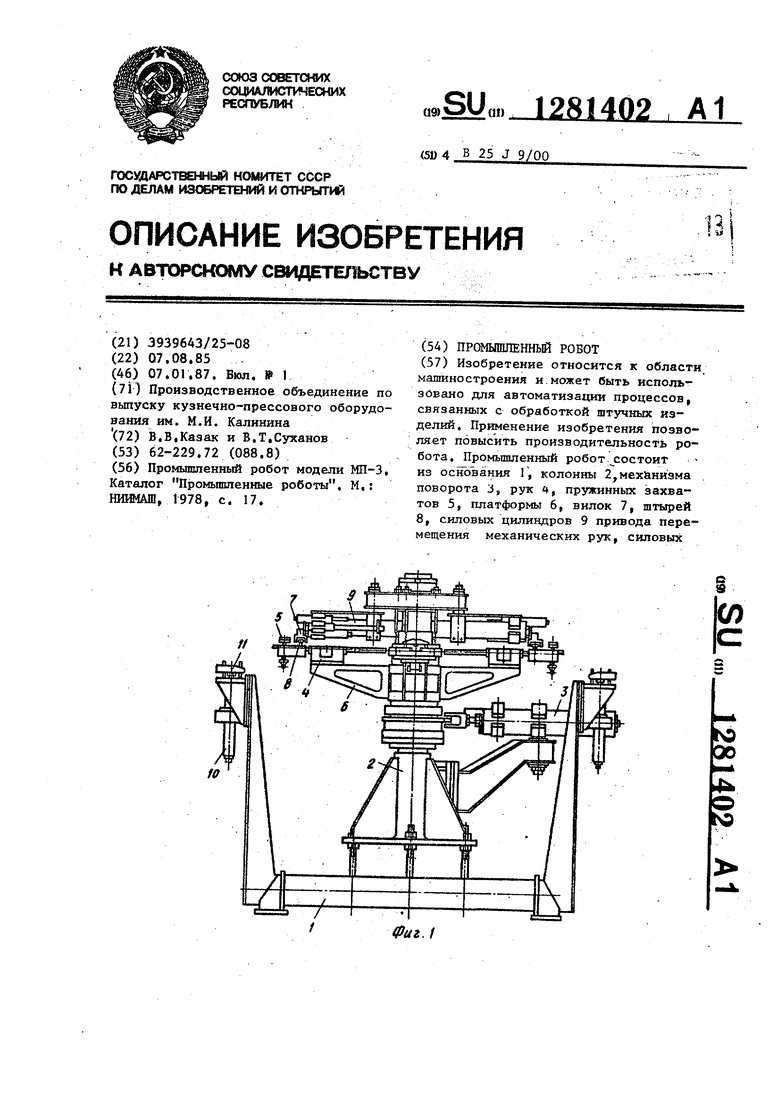
VuiS
1281402 /JJ
ff-6
Составитель Ю.Вильчинский Редактор Л.Гратилло Техред В.Кадар
Заказ 7201/И Тираж 949Подписное.
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий- 113035, Москва, , Раушская наб„р д.4/5.
Производственно-полиграфическое предприятие, г.Ужгород ул,Проектная,4
Корректор О,Луговая
| Промьшшенный робот модели МП-З | |||
| Каталог Промьшшеншле роботы | |||
| М.: НИШШП, 1978, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
