Изобретение относится к машиностроению и может быть использовано при создании автоматических манипуляторов (AM) и промышленных роботов (ПР).
Известен промышленный робот, содер жащий основание и размещенные на нем следяш,ие электроприводы с безлюфтовыми передачами, а также поворотную колонну, на которой смонтирована многозвенная рука и уравновешиваюш,ий механизм 1.
Недостатками этой конструкции промышленного робота являются непосредственное восприятие передачами привода внешних усилий, возникающих при различных видах обработки (например, клепке), а также ограниченная жесткость конструкции руки при воздействии на нее знакопеременных нагрузок, что приводит к ускоренному износу передач, потере точности и стабильности позиционирования робота. Для увеличения общей жесткости многозвенной конструкции руки робота, передачи привода должнь выполняться массивными, что приводит к увеличению приведенного момента инерции привода, увеличению времени переходных процессов и ухудшению его динамических характеристик. Это в конечном итоге уменьшает долговечность механизмов промышленного робота, увеличивает его массу, ухудшает точностные характеристики и снижает производительность.
Цель изобретения - повышение точности и улучшение динамических характеристик.
Указанная цель достигается тем, что промышленный робот, содержащий основание и размещенные на нем следящие электроприводы с безлюфтовыми передачами, а также поворотную колонку, на которой смонтирована многозвенная рука, уравновешивающий механизм и систему автоматического управления снабжен телескопическими устройствами, штанга которых смонтирована в гильзе с возможностью фиксации друг относительно друга фиксаторами, при этом телескопические устройства щарнирно соединены с основанием, колонной и со звеньями руки, образуя силовые треугольники с переменными геометрическими параметрами.
Использование телескопических устройств с фиксаторами положения штанг позволяет существенно увеличить жесткость многозвенной конструкции руки промышленного робота, .значительно уменьшив при этом общую массу промышленного робота, который может быть выполнен в виде переносной конструкции. За счет уменьшения подвижных масс промышленного робота улучшаются динамические характеристики приводов, что позволяет интенсифицировать их переходные процессы, увеличить скорость перемещения подвижных звеньев робота и его произв.одительность. Разгрузка передач приводов телескопическими устройствами увеличивает долговечность работы передач, улучшает стабильность точностных характеристик робота и устойчивость положения звеньев руки робота при позиционировании.
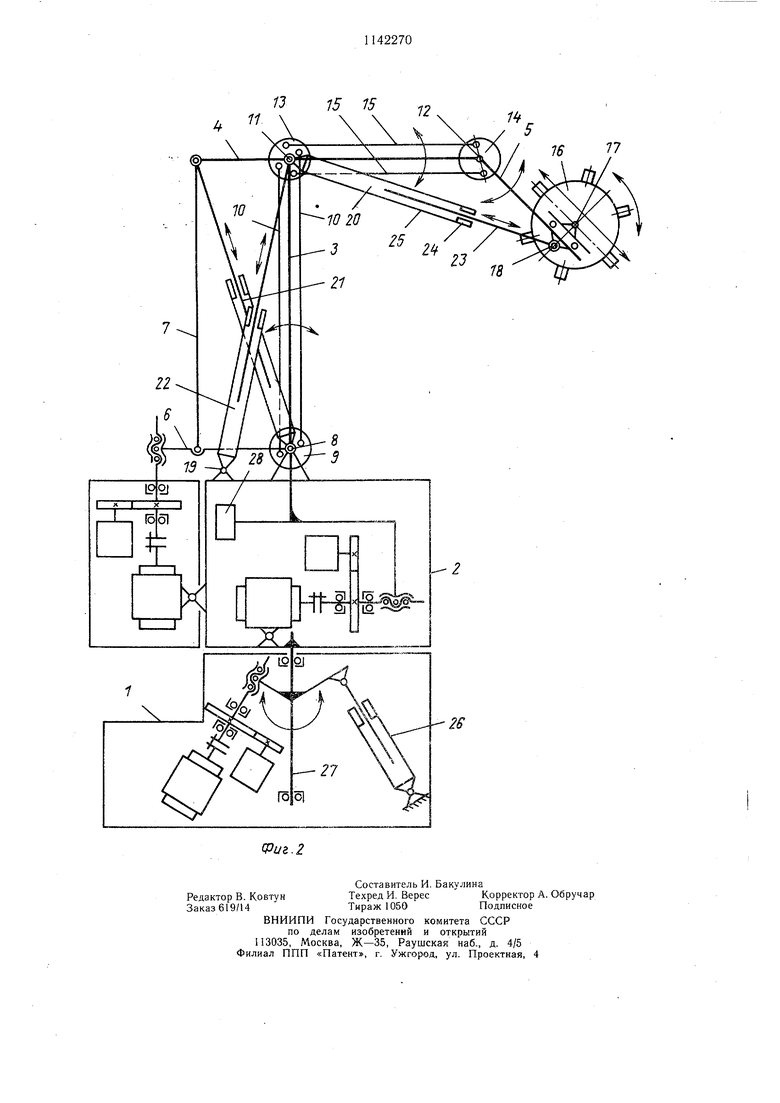
На фиг. 1 изображена общая конструкция промышленного робота; на фиг. 2 - ки-нематическая схема промышленного робота.
Промышленный робот содержит основание 1 с размещенной на нем поворотной колонной 2. На поворотной колонне 2 смонтирована рука, состоящая из звеньев 3, 4 и 5, которые снабжены безлюфтовыми шариковинтовыми передачами с датчиками положения и следящими электроприводами. Звенья 3 и 4 совместно с рычагами 6 и 7 образуют параллелограмм. На поворотной колонне 2 смонтированы ось 8 со звеном 3 и диском 9, на котором щарнирно закреплены тяги 10. На осях 11 и 12 установлены диски 13 и 14 с шарнирно закрепленными тягами 15. На звене 5 смонтирована многоинструментальная головка 16 с возможностью вращения на оси 17 и плоскопараллельного перемещения по направляющим. Звенья 3, 4 и 5 посредством шарнирных опор 18 и 19 соединены телескопическими устройствами 20, 21 и 22. Телескопическое устройство содержит цилиндрическую штангу 23 с возможностью свободного перемещения в фиксаторе 24, смонтированном в гильзе 25, при незафиксированных положениях телескопического устройства. При зажиме фиксатором 24 штанги 23 образуется замкнутый силовой треугольник из звень,ев 4 и 5 и телескопического устройства 20. Аналогичные телескопические устройства 21, 22 и 26 при зажиме фиксаторами штанг образуют силовые треугольники из следующих звеньев: 3-4-21, 2-3-22 и 1-ось 27 поворотной колонны 2-телескопическое устройство 26. В основании 1 размещен уравновешивающий груз 28. Для запуска робота в работу оператор на пульте управления переводит тумблер в положение «Автомат и нажимает кнопку «Автомат. С этого момента весь цикл выполнения технологических и вспомогательных команд производится по записанной при обучении промышленного робота программе без участия оператора. Отработка перемещений звеньев. 3, 4 и 5 руки промышленного робота и поворот колонны 2 может производиться как одновременно всеми электроприводами, так и последовательно каждым в отдельности.
Отработка заданных углов поворота звеньев 3, 4 и 5 контролируется датчиками
положения, которые при достижении заданных углов поворота соответствующими звеньями промышленного робота, дают команды через систему автоматического управления одновременно на сброс напряжения на обмотках двигателей и на включение фиксаторов телескопических устройств 20, 21, 22 и 26. При этом фиксаторы жестко схватывают штанги телескопических устройств, образуя замкнутые силовые треугольники с переменными геометрическими параметрами, которые воспринимают нагрузки, возникающие при механической обработке (сверлении и клепке). После окончания обработки автоматически производится отвод инструмента и переход робота на следующую позицию для выполнения следующих операций. Все операции повторяются до окончания полной обработки изделия, после чего робот отключается, подавая при этом звуковой и световой сигналы окончания полного цикла работы.
Промышленный робот может быть использован для выполнения следующих
технологических операций: сверления и зенкования отверстий в различных изделиях; установки заклепки в отверстие и образование замыкающей головки (расклепывание); сварки и покраски изделий, транспортировки инструмента в пространстве.
Предложенная конструкция промышленного робота с телескопическими устройствами позволяет воспринимать динамические нагрузки, возникающие при клепке, без
снижения точности позиционирования конечного звена робота, несущего рабочий инструмент, за счет разгрузки прецизионных безлюфтовых кинематических передач приводов. Кроме того, исключаются заклинивание и поломка инструмента (например, сверла) при обработке за счет упругих деформаций нежесткой многозвенной руки робота. Телескопические устройства позволяют при сохранении массы робота значительно увеличить жесткость его руки, что существенно при исполнении робота переносным вариантом, необходимым для работы в заKpbiTbix объемах, например, внутри фюзеляжа самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1569222A1 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| Автоматизированная линия для штамповки деталей из листового материала | 1987 |
|
SU1505639A1 |
| Манипуляционное устройство для промышленных роботов | 1989 |
|
SU1641608A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Захватная головка | 1986 |
|
SU1390018A1 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| УСТРОЙСТВО, ПРЕПЯТСТВУЮЩЕЕ СКОЛЬЖЕНИЮ ОПОРНОЙ ЛАПЫ, И САМОХОДНАЯ МАШИНА | 2013 |
|
RU2610895C2 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Механизм поворота промышленного робота | 1983 |
|
SU1119839A1 |
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий основание и размеш,еннь(е на нем следящие электроприводы с безлюфтовыми передачами, а также поворотную ко« / лонну, на которой смонтирована многозвенная рука, уравновешивающий механизм и систему автоматического управления, отличающийся тем, что, с целью повышения точности и улучшения динамических характеристик, он снабжен телескопическими устройствами, штанга которых смонтирована в гильзе с возможностью фиксации друг относительно друга фиксаторами, при этом телескопические устройства шарнирно соединены соответственно с основанием, колонной и со звеньями руки, образуя силовые треугольники с переменными геометрическими параметрами. 25 23 гч- 12 ,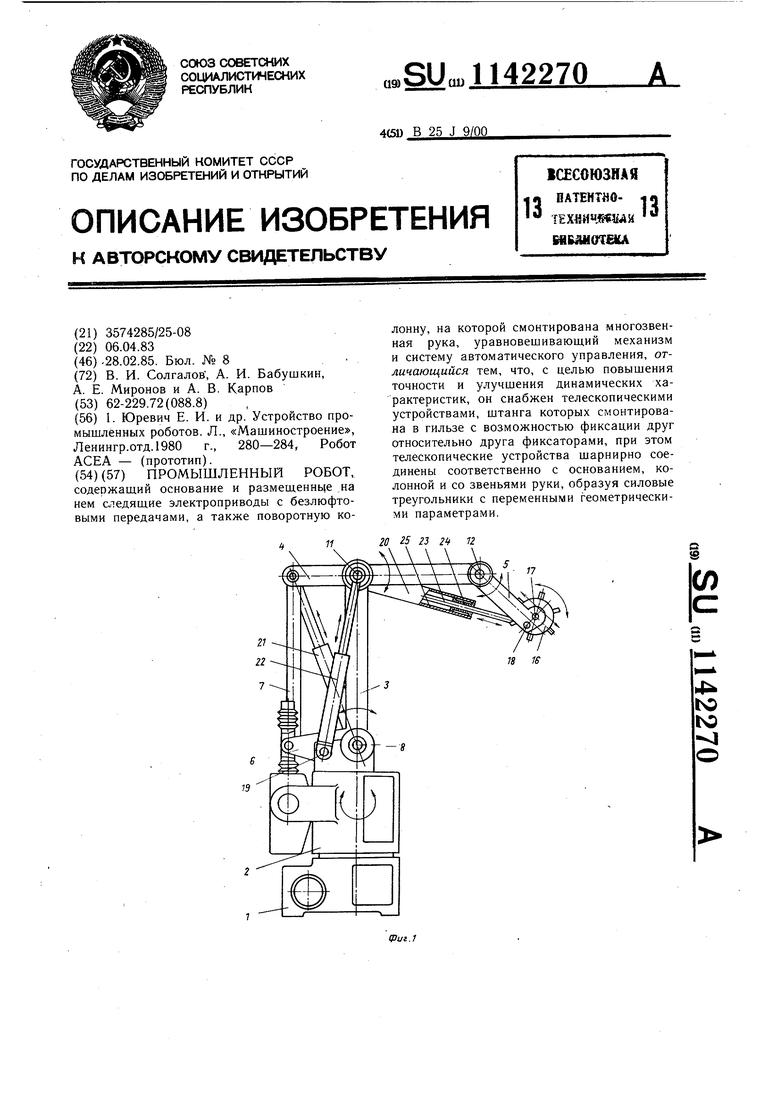
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л., «Машиностроение, Ленингр.отд.1980 г., 280-284, Робот АСЕА - (прототип). | |||
