10
Изобретение относится к машиностроению и может быть использовано для автоматизации вспомогательных операций загрузки-разгрузки технологического оборудования.
Целью изобретения является упрондение конструкции за счет сокращения количества силовых цилиндров привода.
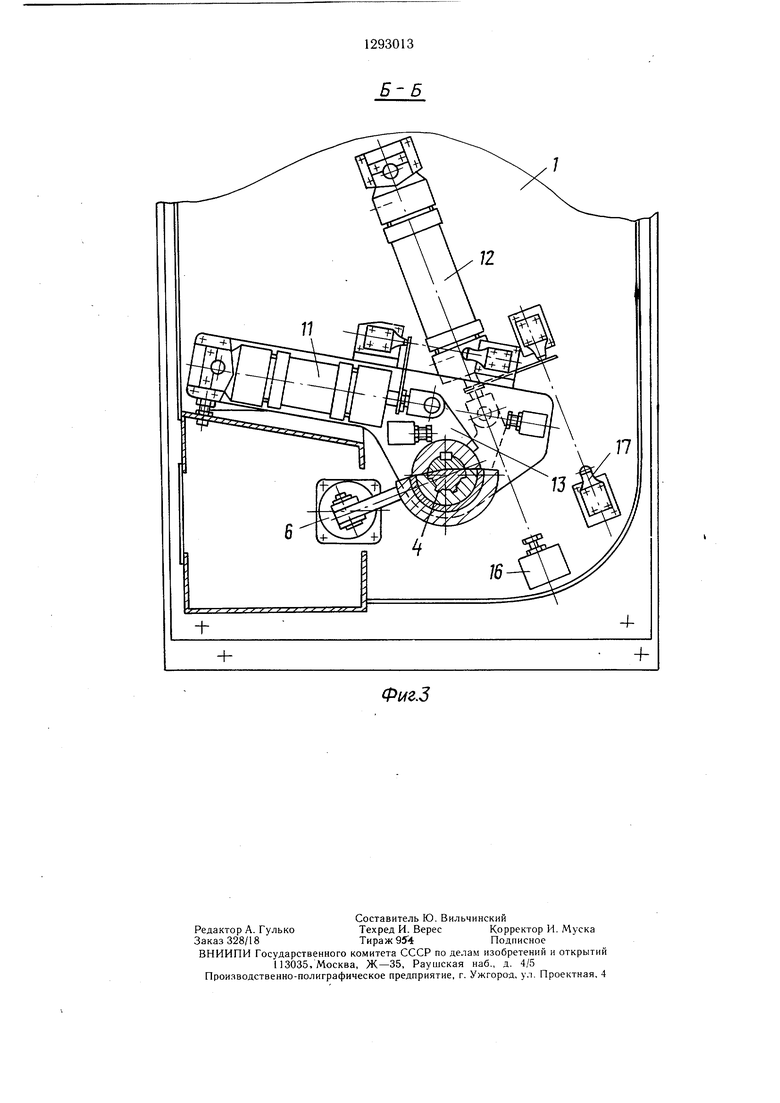
На фиг. 1 изображен робот, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Промышленный робот состоит из основания 1, на котором посредством подшипников 2 и 3 смонтирован вал 4 с механической рукой 5 и механизмы ее подъема и поворота. Вал 4 состоит из двух частей, имею- jj ш,их шлицевое соединение. Механизм подъе- ма содержит силовой цилиндр 6, который шарнирно связан с основанием 1 и шток которого шарнирно соединен с проушиной 7 буксы 8, обеспечиваюш,ей соединение частей вала 4.
Механизм поворота вала 4 состоит из втулок 9 и 10 и двух силовых цилиндров 11 и 12. Втулка 9 жестко закреплена на валу 4 и снабжена рычагом 13. Втулка 10 установПри включении силового цилиндра 12 через рычаг 15, втулку 10, ее опорный элемент 14, силовой цилиндр 11, проушину 13 и втулку 9 поворачивается вал 4 с механической рукой 5. При включении силового цилиндра 11 происходит дополнительный поворот вала 4. Угол поворота вала 4 регулируется упорами 16. Положение подвижных элементов силовых цилиндров определяется датчиками 17.
Включением силовых цилиндров 6, 11 и 12 в определенной последовательности достигается требуемая циклограмма работы устройства с обеспечением нескольких точек позиционирования руки по углу поворота. Формула изобретения
Промышленный робот, содержащий основание, на котором с возможностью поворота вокруг своей оси смонтирован вал с механической рукой, механизм ее поворота и подъема и приводы от силовых цилиндров, 20 отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества силовых цилиндров при сохранении количества точек позиционирования, механизм поворота механической руки выполнен в виде
лена на валу 4 с возможностью поворота 25 втулок, жестко связанных соответотносительно его оси и снабжена опорным элементом 14 и рычагом 15. Силовой цилиндр 11 шарнирно связан корпусом с опорным элементом 14, а штоком - с рычагом 13. Силовой цилиндр 12 шарнирно свяствующими рычагами, первая из которых жестко установлена на валу механической руки, а вторая установлена на этом же валу с возможностью поворота относительно его оси и снабжена опорным элементом, при
зан корпусом с основанием 1, а штоком -30 этом корпус и подвижный элемент одного из
с рычагом 15. На основании 1 и опорномсиловых цилиндров шарнирно связаны соотэлементе 14 размещены упоры 16 и датчи-ветственно с упомянутым опорным элеменки 17.том и с рычагом первой втулки, а корпус и
Работа производится следующим обра-подвижный элемент второго - с основанизом.ем и с рычагом второй втулки.
j
При включении силового цилиндра 12 через рычаг 15, втулку 10, ее опорный элемент 14, силовой цилиндр 11, проушину 13 и втулку 9 поворачивается вал 4 с механической рукой 5. При включении силового цилиндра 11 происходит дополнительный поворот вала 4. Угол поворота вала 4 регулируется упорами 16. Положение подвижных элементов силовых цилиндров определяется датчиками 17.
Включением силовых цилиндров 6, 11 и 12 в определенной последовательности достигается требуемая циклограмма работы устройства с обеспечением нескольких точек позиционирования руки по углу поворота. Формула изобретения
Промышленный робот, содержащий основание, на котором с возможностью поворота вокруг своей оси смонтирован вал с механической рукой, механизм ее поворота и подъема и приводы от силовых цилиндров, 0 отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества силовых цилиндров при сохранении количества точек позиционирования, механизм поворота механической руки выполнен в виде
втулок, жестко связанных соответствующими рычагами, первая из которых жестко установлена на валу механической руки, а вторая установлена на этом же валу с возможностью поворота относительно его оси и снабжена опорным элементом, при
Фиг.2
Б-Б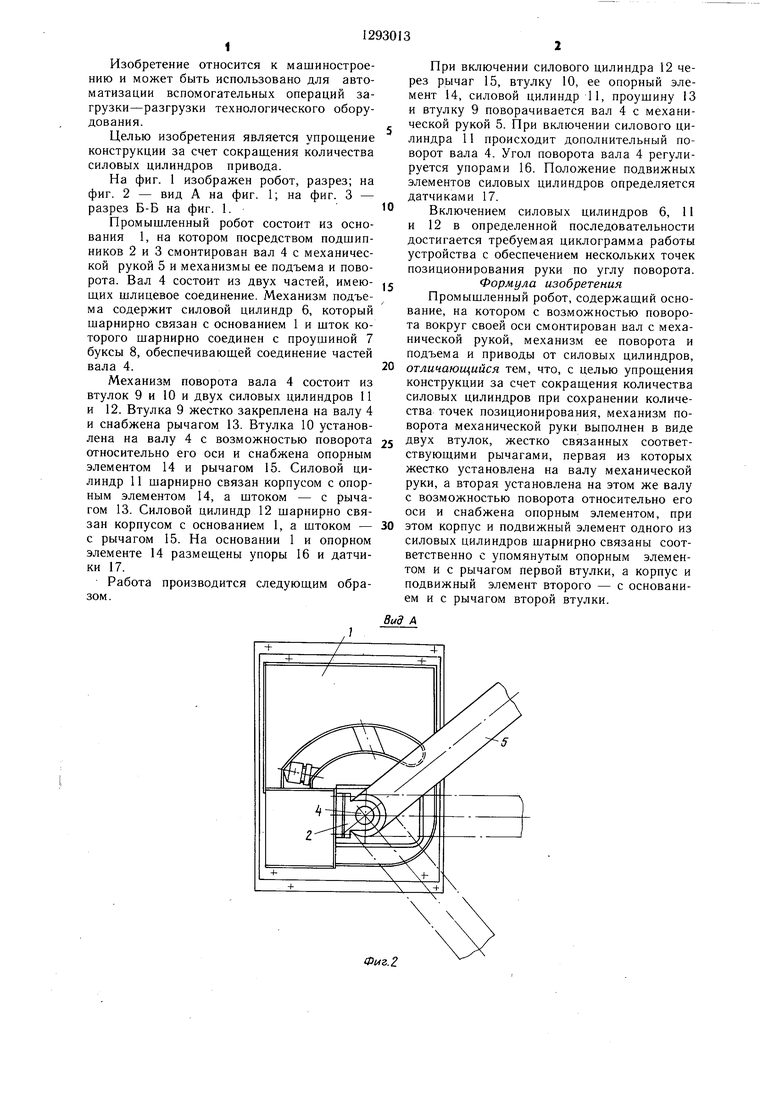
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1988 |
|
SU1576305A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Промышленный робот | 1980 |
|
SU880713A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
Изобретение относится к области машиностроения и предназначено для загрузки- разгрузки технологического оборудования. Цель изобретения - упрош,ение конструкции робота за счет сокраш,ения количества силовых цилиндров привода. Устройство содержит основание 1, вал 4 с механической рукой 5, механизм подъема механической руки в виде силового цилиндра 6, шток которого через проушину 7 связан с валом 4, и механизм поворота вала 4, состоящий из втулок 9 fi 10, первая из которых жестко связана с валом 4, а вторая - подвижно, и двух силовых цилиндров II и 12, первый из которых шарнирно связан с втулкой 9 и опорным элементом 14 втулки 10, а второй шарнирно связан с основанием 1 и втулкой 10. Включением цилиндров 11 и 12 в различной последовательности можно получить несколько точек позиционирования по углу поворота руки 5. 3 ил. ш (Л го со оо со фиг.1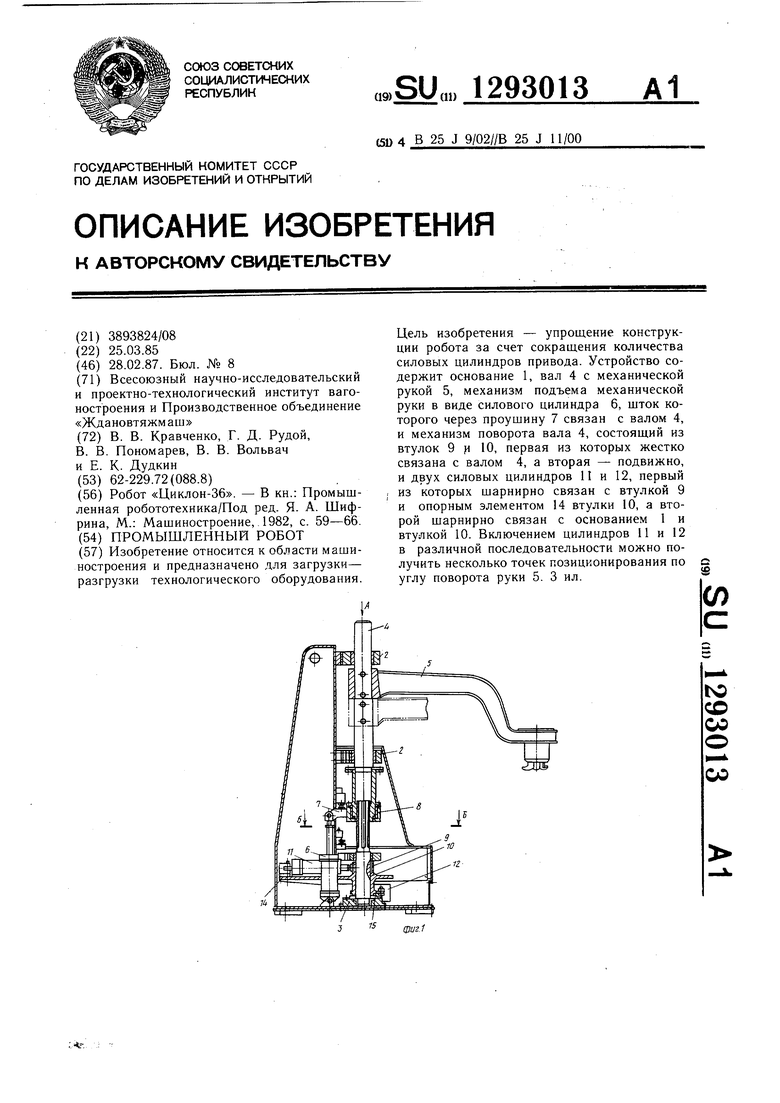
Фиг.З
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| - В кн.: Промышленная робототехника/Под ред | |||
| Я | |||
| А | |||
| Шиф- рина, М.: Машиностроение, 1982, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
