Изобретение относится к системам автоматического управления и может быть использовано для сигнализации о допустимых погодных условиях при заходе на посадку летательных аппаратов.
Цель изобретения повышение вероятности безаварийной посадки летательного аппарата в различных погодных условиях.
На чертеже представлена структурная схема системы сигнализации об условиях захода на посадку летательного аппарата.
Предлагаемая система сигнализации содержит сигнализатор 1 отказов первого радиовысотомера, сигнализатор 2 отказов второго радиовысотомера, сигнализатор 3 отказа автомата тяги, сигнализатор 4 режима "Курс", сигнализатор 5 режима "Глиссада", первую схему И 6, первую схему ИЛИ 7, вторую схему И 8, сигнализатор 9 "Первая категория", сигнализатор 10 отказов первого курсового радиоприемника, сигнализатор 11 отказов второго курсового радиоприемника, сигнализатор 12 отсутствия резервов авиагоризонта, сигнализатор 13 отсутствия резерва продольного канала автопилота, сигнализатор 14 отсутствия резерва бокового канала автопилота, сигнализатор 15 отсутствия резерва вычислителей захода на посадку, сигнализатор 16 отсутствия резерва вычислителей выравнивания, первую схему НЕ 17, вторую схему НЕ 18, вторую схему ИЛИ 19, третью схему И 20, сигнализатор 21 "Вторая категория", сигнализатор 22 посадочного положения самолетной механизации, четвертую схему И 23 и сигнализатор 24 "Третья категория".
Система сигнализации работает следующим образом.
При включении режима автоматического захода на посадку включаются сигнализаторы 4 режима "Курс" и 5 режима "Глиссада". Из сигнализаторов 4 и 5 сигналы UБ и Uп поступают соответственно на входы второй 8, третьей 20 и четвертой 23 схем И.
На третий вход второй схемы И 8 поступает сигнал с выхода первой схемы ИЛИ 7, на входы которой поступают сигналы при отказах, вызывающих обрабатывание сигнализатора 3 отказа автомата тяги UАТ, или сигнализатора 12 отсутствия резерва авиагоризонтов UАТ, или одновременного срабатывания (∧) двух сигнализаторов отказа первого 1 и второго 2 радиовысотомеров U U
U .
.
Возникновение этих отказов приводит к невозможности выполнения безопасного захода на посадку в условиях вертикальной видимости менее, чем 60 м, или горизонтальной видимости менее, чем 800 м, что соответствует погодным условиям первой категории ИКАО и вызывает появление сигнала на выходе второй схемы И 8 и срабатывание сигнализатора 9 "Первая категория", который выдает информацию об ограничении возможности захода на посадку в погодных условиях хуже, чем первая категория ИКАО, в соответствии со следующим выражением:
UI= UБ ∧ Uп∧ [UАТ∨ UАГ∨ (U U
U )]
)]
На первый вход третьей схемы И 20 поступает сигнал с выхода многовходовой логической схемы 19 ИЛИ, на входы которой поступают сигналы, возникающие при отказах, вызывающих срабатывание одного из следующих сигнализаторов:
U от сигнализатора первого отказа первого радиовысотомера;
от сигнализатора первого отказа первого радиовысотомера;
U от сигнализатора второго отказа второго радиовысотомера;
от сигнализатора второго отказа второго радиовысотомера;
U от сигнализатора 10 отказа первого курсового радиоприемника;
от сигнализатора 10 отказа первого курсового радиоприемника;
U от сигнализатора 11 отказа второго курсового радиоприемника;
от сигнализатора 11 отказа второго курсового радиоприемника;
Uт от сигнализатора 13 отсутствия резерва продольного канала автопилота;
Uкр от сигнализатора 14 отсутствия резерва бокового канала автопилота;
Uвз от сигнализатора 15 отсутствия резерва вычислителей захода на посадку;
Uвв от сигнализатора 16 отсутствия резерва вычислителей выравнивания.
Возникновение этих отказов приводит к невозможности выполнения безопасного захода на посадку в погодных условиях вертикальной видимости менее, чем 30 м, или горизонтальной видимости менее, чем 400 м, что соответствует условиям второй категории ИКАО, в связи с чем на выходе третьей схемы И 20 формируется сигнал UII, что вызывает срабатывание сигнализатора 21 "Вторая категория". Сигнализатор 21 выдает информацию об ограничении возможности захода на посадку в погодных условиях хуже, чем вторая категория ИКАО в соответствии со следующим выражением:
UII= UБ ∧ Uп∧ UI∧(U U
U U
U U
U Uт∨ Uкр∨ Uвз∨ Uвв).
Uт∨ Uкр∨ Uвз∨ Uвв).
Подключение на четвертый вход третьей схемы И 20 сигнала через схему НЕ 17 обеспечивает невозможность включения сигнализатора 21 "Вторая категория" при срабатывании сигнализатора 9 "Первая категория".
При полной исправности бортового оборудования после установки самолетной механизации (закрылков, предкрылков, шасси и т.п.) в посадочное положение появляется сигнал Uмех, срабатывает сигнализатор 22 и на выходе четвертой схемы И 23 формируется сигнал
UIII= UБ∧ Uп∧ Uмех∧  UII
UII
Сигнал UIII поступает на сигнализатор 24 "Третья категория", обеспечивая информацию экипажу о возможности безопасного захода на посадку в погодных условиях третьей категории ИКАО.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИГНАЛИЗАТОР ОТКАЗОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1985 |
|
SU1312916A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
Изобретение относится к системам автоматического управления и может быть использовано для сигнализации о допустимых погодных условиях при заходе на посадку летательных аппаратов. Цель изобретения - повышение вероятности безаварийной посадки летательного аппарата. Система содержит ряд сигнализаторов, дающих сведения о состоянии основных узлов и систем летательного аппарата. В зависимости от сочетания сигналов сигнализаторов с помощью логических схем И 6, 7, 8, 23, схемы ИЛИ 19, схем НЕ 17, 18 срабатывает один из сигнализаторов 9, 21 или 24, информируя о возможности захода на посадку в погодных условиях, первый, второй или третий категории ИК АО. 1 ил.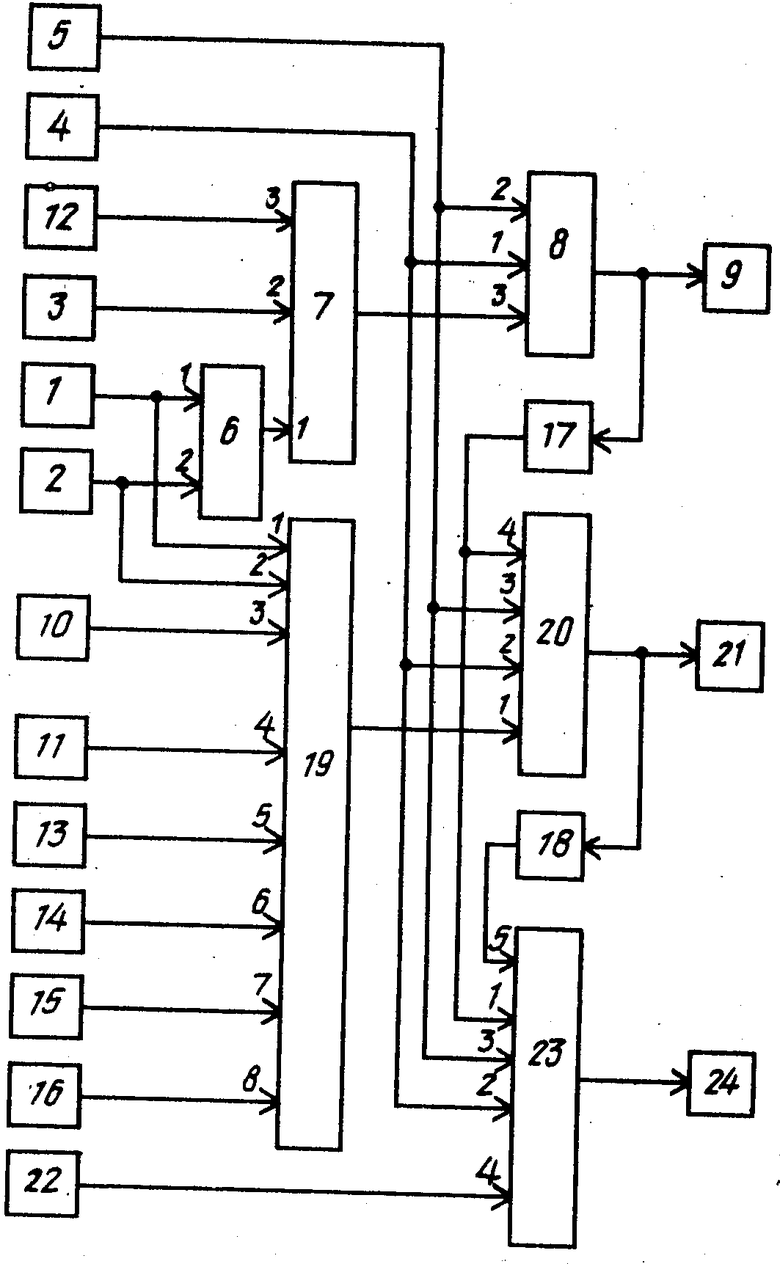
СИСТЕМА СИГНАЛИЗАЦИИ ОБ УСЛОВИЯХ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая последовательно соединенные первую схему И, первую схему ИЛИ, последовательно соединенные вторую схему И, первый индикатор, а также сигнализаторы отказов, первого и второго радиовысотомеров, сигнализатор отказов автомата тяги, сигнализаторы режимов "Курс" и "Глиссада", при этом выходы сигнализаторов отказов первого и второго радиовысотомеров подключены соответственно к первому и второму входам первой схемы И, выход сигнализатора отказа автомата тяги соединен с вторым входом первой схемы ИЛИ, а выходы сигнализаторов режимов "Курс" и "Глиссада" подключены соответственно к первому и второму входам второй схемы И, отличающаяся тем, что, с целью повышения вероятности безаварийной посадки летательного аппарата, в нее введены последовательно соединенные вторая схема ИЛИ, третья схема И, второй индикатор, последовательно соединенные первая схема НЕ, четвертая схема И, третий индикатор, а также вторая схема НЕ, сигнализаторы отказов первого и второго курсового радиоприемников, сигнализатор отсутствия резервов авиагоризонта, сигнализаторы отсутствия резерва продольного и бокового каналов автопилота, сигнализаторы отсутствия резерва вычислителей захода на посадку и выравнивания, сигнализатор посадочного положения самолетной механизации, при этом выход сигнализатора отсутствия резервов авиагоризонта подключен к третьему входу первой схемы ИЛИ, выход которой соединен с третьим входом второй схемы И, выход которой подключен к входу схемы НЕ, а выходы сигнализаторов режимов "Курс" и "Глиссада" подключены соответственно к второму и третьему входам третьей и четвертой схем И, четвертый вход последней из которых соединен с выходом сигнализатора посадочного положения самолетной механизации, а пятый вход соединен с выходом второй схемы НЕ, вход которой подключен к выходу третьей схемы И, четвертый вход которой соединен с выходом первой схемы НЕ, причем выходы сигнализаторов отказов первого и второго радиовысотомеров, сигнализаторов отказов первого и второго курсового радиоприемников, сигнализаторов отсутствия резервов продольного и бокового каналов автопилота, сигнализаторов отсутствия резервов вычислителей захода на посадку и выравнивания соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами второй схемы ИЛИ.
| Способ крашения тканей | 1922 |
|
SU62A1 |
