iB
со оо сю tc
N5
1-1:(()б|)етеиис отиосигся к машиносгрое- ник) и может iicii().ib3OBiiTbCH и тормо.чных устройствах ра; :1ич11ых Mcxamt.nioii.
Целью и:)обрете)1ия является y. i 4iiieHne условий эксп. 1уатации путем уменыпения усилия управ.тения и обеспечения фиксации тормозиогч) устройства во включенном но.к жении.
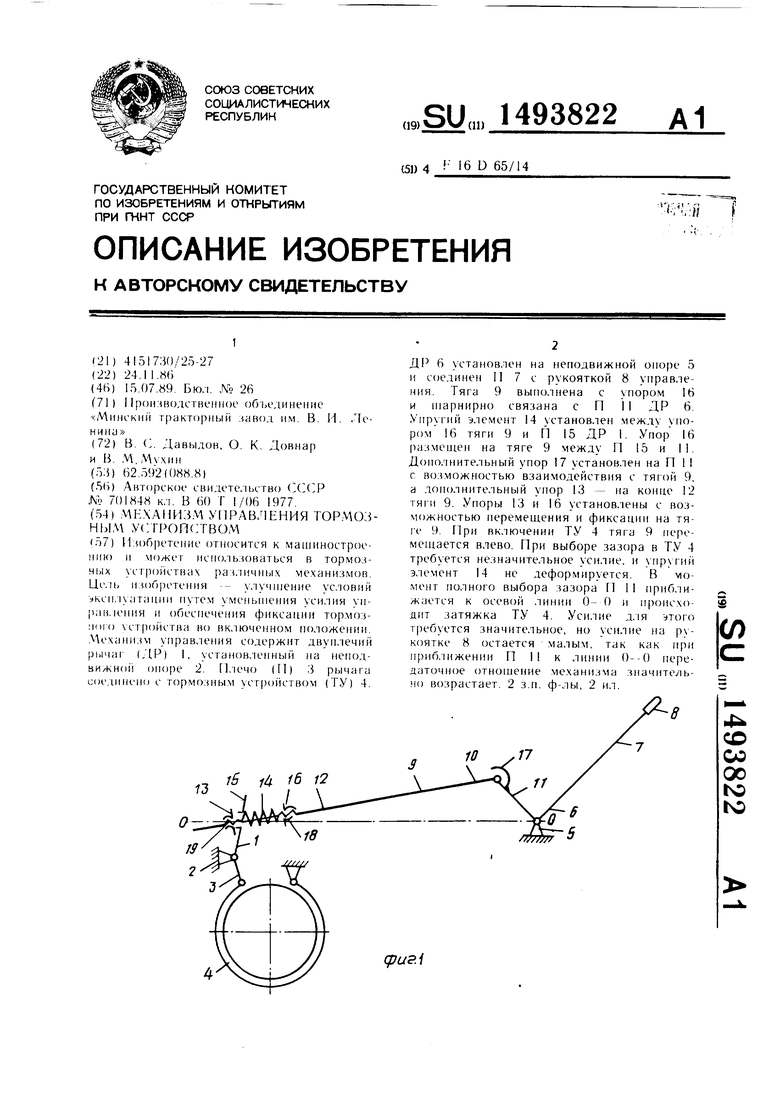
На фи1 . I и;)ображена схема ii)e;i- лагаемого механизма управления Ei выключенном положении тормозного устройства; на фиг. 2то же, во включешюм
положении тормозпо1Ч) уст)()11ства.
ЛАеханизм управ.тения тормозным устройством солержпт двуп.течий рычаг 1. установ. 1енн1 1Й на неподвижной опоре 2 п соединенный п.течом . 5 с тс рмозным устройством 4, например, ,1енточным тормозом. На неподвижной опоре 5 установ.чен двуп.течий 1)ычаг Н, соединенный илечом 7 с рукоятко) М ун)авления. Тяга 9 |иарнир- но связана концом К) с нлечом II рычага (). Другой конен 12 тяги 9 подпружинен в сторону упора 13 уп)угим элементом 14, установ, 1енным между п.течом 15 двуплечего рычага 1 и упором 16. Упор 1в на тяге 9 размещен между плечами II и 15 соответстЕК нно 1)ыча- гов t) и 1. Угмовой поворот конца К) тяг и 9 относите.тьно н.леча I 1 )ычага (i ограничен упором 17, установленным на рычаге 6. Упоры 13 и 16 усгаЕювлены на тя1 е 9 с возможностью смешения и фиксации относительно конца 12 тяги 9 за счет, например, вьпюлиения сопряженных участков 18 и 19 соответственно на упорах If) и 13 п конце 12 тя1и 9 резьбовыми.
ЛАеханизм уирав.тения Т()С)М()ЗН1)1М уст- ройстЕИ)м работает с,1едуюшим образом.
Л.1Я вк. почения тормозног о усгройсгва ручка 8 управ.1еипя из вык. 1юченного положения (фиг. 1) перемешаегсн B.ieBo. . :)то вызывает iiepeMeinetine тяги 9, которая через упор 16 и упругий :(лемент 14 поворачивает двуп.течий рычаг 1 относите.тьно неподвижно опоры 2 д. 1Я выбора зазора в тормозе 4. Усилие для выбора зазора в тормозе 4 при утом т1 )ебует- ся незначительное и упругий :1лемеит 12 не деформируется, а так как передаточное отноц ение между рыча1 ом В и уп|)у- гим : лементом 14 в момент выбора за- .зора уменьшенное (определяется кратчай- П111МИ расстояниями между цент)ом ненод- впжной опоры 5 н направ.тепием перемещения тяги 9 и рычага 6|, то п ход рычага 6 для выб()а зазора в то|)мозе 4 небольшой. В момент полного выбора зазора в TOj5MO3e 4 плечо 1 1 рыча а Н и тяга 9 приближаются к положению.
показанному на фиг. 1 и 2 осевой линией О -О, происходит затяжка тормоза 4. Усилие для этого требуется значительное, упругий элемент 12 при этом деформи- руетси, и усилие через двуплечий рычаг 1 передается на тормоз 4. Однако усилие на рукоятке 8 управления для этого продолжает оставаться незначительным, так как при приближении тяги 9 и плеча 1 1 рычага 6 к линии 0-0 передаточное от
ношение механизма значительно возрастает.
После перехода тягой 9 и плечом I I линии 0-0 дальнейшее перемещение упомянутых элементов происходит за счет разжатия упругого элемента 14, которое
ллится до ограничения относительно1-о перемещения тяги 9 и плеча 11 упором 17, после чего обеспечивается фиксация механизма во включенном положении. Для выключения тор.моза 4 описанные действия производятся в обратном порядке, при этом
для обеспечепия зазора в тормозе поворот рычага I осуществляется за счет воздействия на него упора 13. При износе тормозного устройства 4 исходное положение элементов механизма устанавливает
ся пе|)емеп1ением резьбовьгх упоров 13 и 16 относите.тьно конца 12 тяг и 9.
Форм1/.ш чзооретенин
. .Аеханизм управления тормозным уст- ройством, содержащий первый двуплечий рычаг, установленный на одной неподвижной опоре и соединенный иервьз1м н.1ечом с тормозным устройством, второй двуплечий рычаг, установлеипый на другой неподвижной опоре и соединенный первым п, 1ечом с )укояткой управления, тягу с упором, шарнирио связанную со вторым п.течом BTOpoi o двуп.чечего рычага, и упру- | ии элемент, устаи(Л5ленный между упором тя1 и и BT(jpbiM плечом первого двуг1. 1ече- Г() |)ычага, отличающийся тем, что, с целью у.тучшения эксплуатациоиньгх качеств путем уменыпенпя усилия управления и обеспечения фиксации T(jpMO3Horo устройства во вк. 1юченном положении, он снабжен дополнительным упором, установленным на втором плече второго рычага с возможностью взаимодействия с тягой, а основной упор установлен на тяге, между вторыми n. ie- чами двуплечих рычагов.
2.ЛАеханизм по п. 1 отличающийся тем, что он снабжен третьим упором,
размешенным на конце тяги со стороны BTcjporo гглеча первого двуплечего рычага, противоположного упругому элементу.
3.Механизм по пп. 1 и 2, отличающийся тем, что упоры на тяге установлены с возможностью переме це И1Я и фиксации.
/ 16
18 /
/7
JI /W ff/ /
сриг.г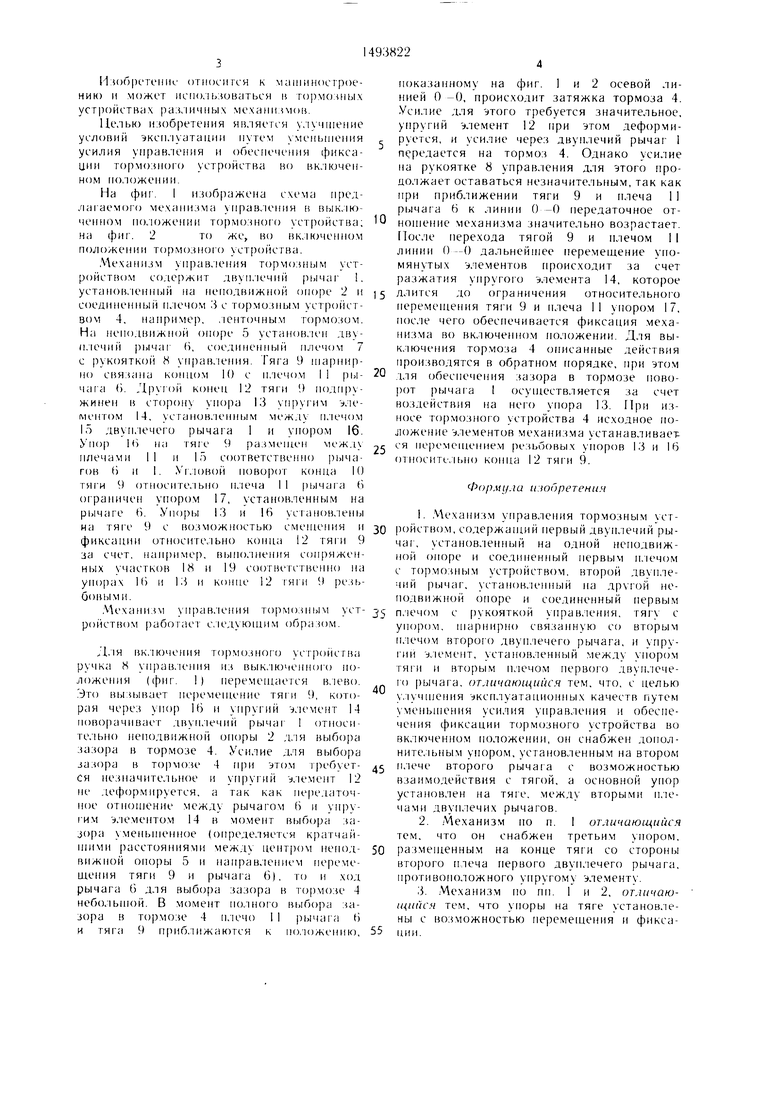
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводной механизм тормоза | 1979 |
|
SU898174A1 |
| Ленточный тормоз | 1985 |
|
SU1339335A1 |
| Ступенчатая коробка передач транспортного средства с переключением передач для разрыва потока мощности | 1988 |
|
SU1518157A2 |
| Дозатор сыпучих кормов | 1987 |
|
SU1419635A1 |
| Механизм управления тормозными устройствами | 1980 |
|
SU964305A1 |
| Упоровоспринимающее устройство | 1984 |
|
SU1258768A1 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2000 |
|
RU2191711C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ ПОДЪЕМА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570504C1 |
| ОДНООБОРОТНАЯ МУФТА | 1970 |
|
SU268808A1 |
| Ленточный тормоз | 1979 |
|
SU846873A1 |
Изобретение относится к машиностроению и может использоваться в тормозных устройствах различных механизмов. Цель изобретения - улучшение условий эксплуатации путем уменьшения усилия управления и обеспечения фиксации тормозного устройства во включенном положении. Механизм управления содержит двуплечий рычаг (ДР) 1, установленный на неподвижной опоре 2. Плечо (П) 3 рычага соединено с тормозным устройством (ТУ) 4. ДР 6 установлен на неподвижной опоре 5 и соединен П 7 с рукояткой управления 8. Тяга 9 выполнена с упором 16 и шарнирно связана с П 11 ДР 6. Упругий элемент 14 установлен между упором 16 тяги 9 и П 15 ДР 1. Упор 16 размещен на тяге 9 между П 15 и 11. Дополнительный упор 17 установлен на П 11 с возможностью взаимодействия с тягой 9, а дополнительный упор 13 - на конце 12 тяги 9. Упоры 13 и 16 установлены с возможностью перемещения и фиксации на тяге 9. При включении ТУ 4 тяга 9 перемещается влево. При выборе зазора в ТУ 4 требуется незначительное усилие, упругий элемент 14 не деформируется. В момент полного выбора зазора П 11 приближается к осевой линии 0-0 и происходит затяжка ТУ 4. Усилие для этого требуется значительное, но усилие на рукоятке 8 остается малым, так как при приближении П 11 к линии 0-0 передаточное отношение механизма значительно возрастает. 2 з.п.ф-лы, 2 ил.