Изобретение относится к машиностроению, а именно к транспортным манипуляторам для обслуживания металлорежущих станков,
Целью изобретения является повышение производительности за снет сокращения времени подачи заготовок под захватное устройство робота.
На фиг,1 изображен транспортный робот, вид спереди; на фиг,2 - то же вид сверху.
Транспортный робот содержит основание 1 и основной механизм его перемещения по рельсовому пути, включающий катки 2 и привод перемещения (не показан). На основании 1 смонтированы исполнительный орган с двумя захватными устройствами 3 и платформа, вьтолненная в виде двухсекционного шагового конвейера с подвижными 4 и неподвижными 5 направляющими. Секции шагового конвейера размещены симметрично относительно оси исполнительного органа и позволяют производить перекладку заготовок со ста- - ционарных (внешних) накопителей и подавать заготовки к захватным устройствам 3, причем расстояние между осями заготовок 6 в захватных устройствах 3 равно шагу конвейера.
Исполнительный орган выполнен в виде двух телескопических модулей подъема 7 и выдвижения 8, при зтом на последнем смонтированы два захватных устройства 3, На основании 1 расположен дополнительный механизм его продольного перемещения, включающими силовой цилиндр 9 с ходом, равным шагу конвейера. При зтом для стопо- рения основания 1 использован силовой цилиндр 10 со штырем 11, входящим в гнездо, вьшолненное в фундаменте.
Число гнезд в фундаменте, которые служат для точной остановки робота, определяется гнездом у станка плюс два гнезда, соответствующие позиции приема заготовок из накопителя заго- товок, а также позиции перекладки обработанных заготовок в выходной накопитель. Таким образом, минимальное количество гнезд равно трем,
Транспортный робот работает следующим образом.
Предварительно транспортный робот подъезжает к накопителю заготовок, стопорится силовым цилиндром 10 и
штырем 11, после чего с помощью левой секции шагового конвейера транспортного робота (фиг.1) производится загрузка этой секции необходимым количеством заготовок (максимальное количество заготовок соответствует числу позиции секций). Эта загрузка вьтол- няется самим шаговым конвейером. Затем транспортный робот следует к одному из станков в порядке, определяемом технологическим процессом обработки. Здесь левое захватное устройство 3, опускаясь за счет телескопического модуля 7 подъема, захватывает заготовку 6 (фиг.1). Затем с помощью телескопических модулей подъема 7 и вьщвижения 8 правое захватное устройство 3 (фиг.1) выводится над рабочей зоной станка, которое при опускании захватьшает обработанную заготовку. Далее включением силового цилиндра 9 производится подвод левого захватного устройства 3 с заготовкой
6 к . После ее укладки на станок исполнительный орган с находящейся в его правом захватном устройстве 3 обработанной заготовкой переносится на правую (фиг.1) секцию шагового
конвейера. Таким образом, производится последовательная разгрузка левой секции шагового конвейера и загрузка правой. После заполнения правой секции шагового конвейера транспортный робот перемещается к выходному накопителю, стопорится у этого накопителя, затем производится перегрузка обра ботанных заготовок в этот нако- питель поштучно с помощью правой секции шагового конвейера.
Формула изобретения
Транспортный робот, содержащий основание, установленный на нем исполнительный орган с захватными устройствами, платформу и основной механизм перемещения основания, о т- личающийся тем, что, с целью увеличения производительности за
счет сокращения времени подачи изделий под захватное устройство, он снабжен дополнительным механизмом перемещения основания, а платформа выполнена в виде двухсекционного шагового конвейера, секции которого смонтированы на основании симметрично относительно оси исполнительного органаJ при этом расстояние между
313410184
осями захватных устройств и шаг пере-. . нительного механизма перемещения рав- мещения основания посредством допол- ны шагу конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1987 |
|
SU1433760A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Транспортный робот | 1988 |
|
SU1541047A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Комплекс плоскошлифовальный автоматический для двухсторонней обработки деталей | 1983 |
|
SU1183361A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Транспортное устройство автоматической линии | 1978 |
|
SU918028A2 |
| Накопитель-перегрузчик | 1989 |
|
SU1731587A1 |
| РАСПИЛОВОЧНЫЙ СТАНОК | 1993 |
|
RU2046712C1 |

Изобретение относится к машиностроению, а именно к транспортным манипуляторам для обслуживания металлорежущих станков. Целью изобретения является повьииение производительное-, ти за счет сокращения времени подачи заготовок под захватное устройство. Это достигается тем, что платформа, установленная на основании 1 транспортного робота, выполнена в виде двухсекционного шагового конвейера, на левой секции которого размещены заготовки, а на правой - обработанные изделия. Кроме того, замена обработанного изделия на следующую заготовку осуществляется с помощью дополнительного механизма продольного перемещения, перемещающего основание на шаг, равный шагу конвейера и расстоянию между захватными устройствами 3. 2 ил. & сл со 4 00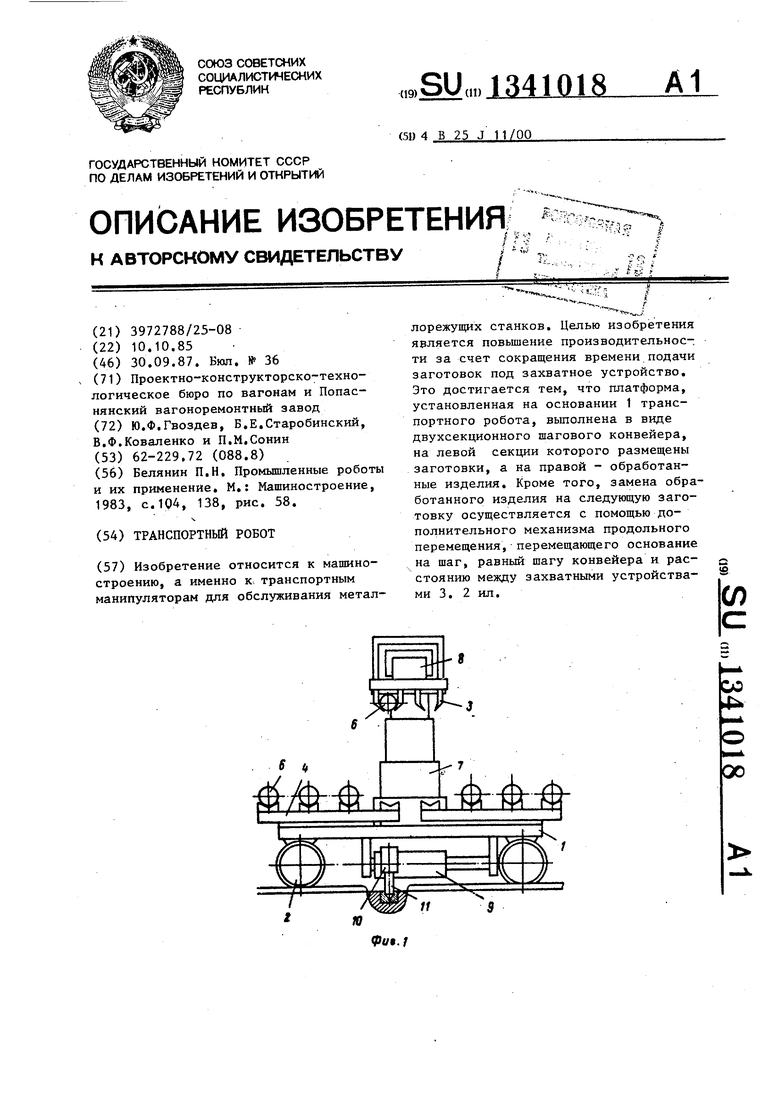
Редактор Е.Копча
Составитель А.Ширяева
Техред И.Верес Корректор Л. Патай
Заказ 1815/1 Тираж 908Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ш ш и
ЧРиг.2
| Белянин П.Н | |||
| Промышленные роботы и их применение | |||
| М,: Машиностроение, 1983, С.10А, 138, рис | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| ч | |||
