двух силовых цилиндров, шток 4 каждо- 25 доватллъность движений элементов при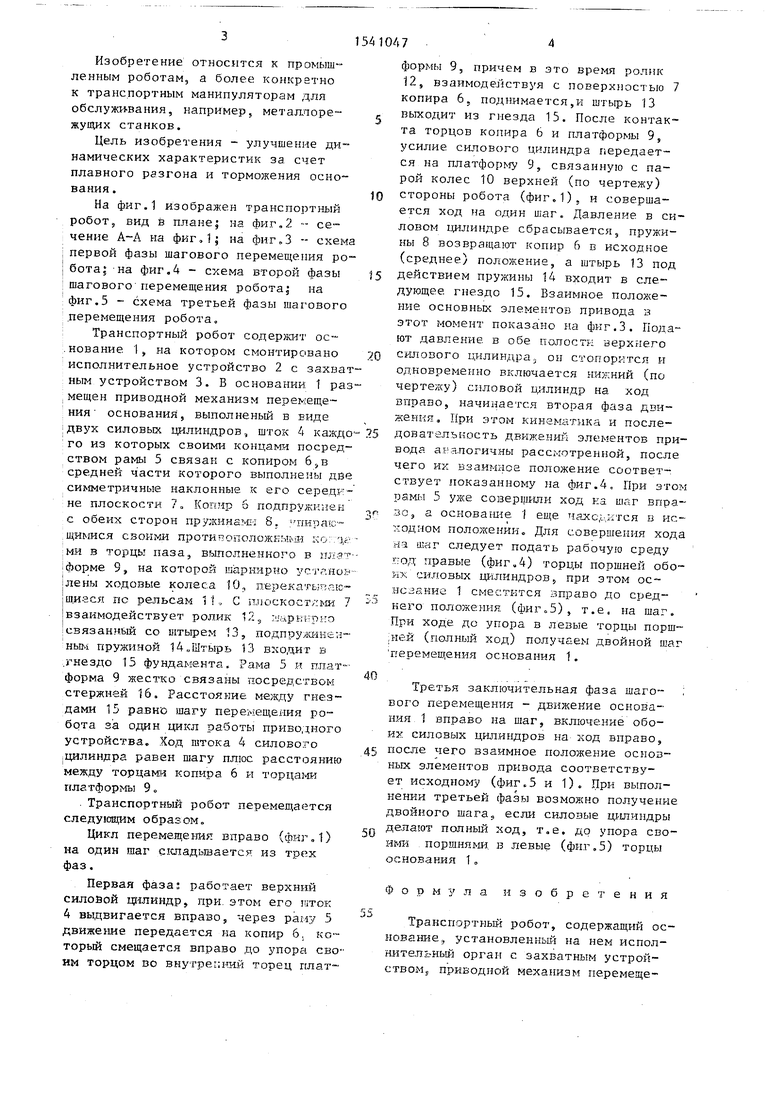
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для нанесения покрытия на изделия | 1990 |
|
SU1776449A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2076840C1 |
| Устройство для переноса заготовок | 1987 |
|
SU1375386A1 |
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| Линия для штамповки деталей из листового материала | 1985 |
|
SU1282946A1 |
| Устройство для поштучной выдачи заготовок | 1984 |
|
SU1196224A1 |
| Транспортная система | 1986 |
|
SU1379175A1 |
| Устройство для разделения прутковогоМАТЕРиАлА HA зАгОТОВКи | 1978 |
|
SU841804A1 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Стенд для динамических и обкаточных испытаний колесно-моторных блоков локомотивов | 1982 |
|
SU1133491A1 |
Изобретение относится к промышленным работам, а более конкретно к транспортным манипуляторам для обслуживания металлорежущих станков. Целью изобретения является улучшение динамических характеристик за счет плавного разгона и торможения основания. Для этого в основании размещен приводной механизм перемещения основания, выполненный в виде двух силовых цилиндров, шток каждого из которых своими концами посредством рамы связан с копиром 6, в средней части которого выполнены две симметричные наклонные к его середине плоскости 7. Копир 6 подпружинен с обеих сторон пружинами 8, упирающимися в платформу 9, на которой шарнирно установлены ходовые колеса, перекатывающиеся по рельсам. С плоскостями 7 взаимодействует ролик 12, шарнирно связанный со штырем 13, подпружиненным пружиной 14. Причем штырь 13 входит в гнездо 15 фундамента. 5 ил.
го из которых своими концами посредством рамы 5 связан с копиром 6,в средней части которого выполнены две симметричные наклонные к его серец - не плоскости 7. Ког чр Ь подпружклек с обеих сторон пружинам-, 8, тшпак.
ЩИМИСЯ СВОИМИ ПрОТИ ОиОЛОЖК -..И ЯО ).ми в торць паза, выполненного в гъ-эт- йорме 9, на которой парнирпо yrjvHo1 лены ходовые колеса 10, лерека гь с шигс5; по рельсам М , С плоско г/ ми 7 1 взаимодействует ролик 1/., ч .pt.i то связанный со штырем 13, подптэужик н- ным пружиной 14„Штырь И входит в гнездо 15 фундамента. Рама 5 и платформа 9 жестко связаны аосрсрсгвом стержней 16. Расстояние между гнездами 15 равно шагу перемещения робота за один цикл работы приводного устройства. Код штока 4 силово -о цилиндра равен шагу плюс расстоянию между торцами копира 6 и торцами платформы 9
Транспортный робот перемещается следующим образом.
Цикл переметения вправо (фиг.1) на один шаг складываете из трех фаз.
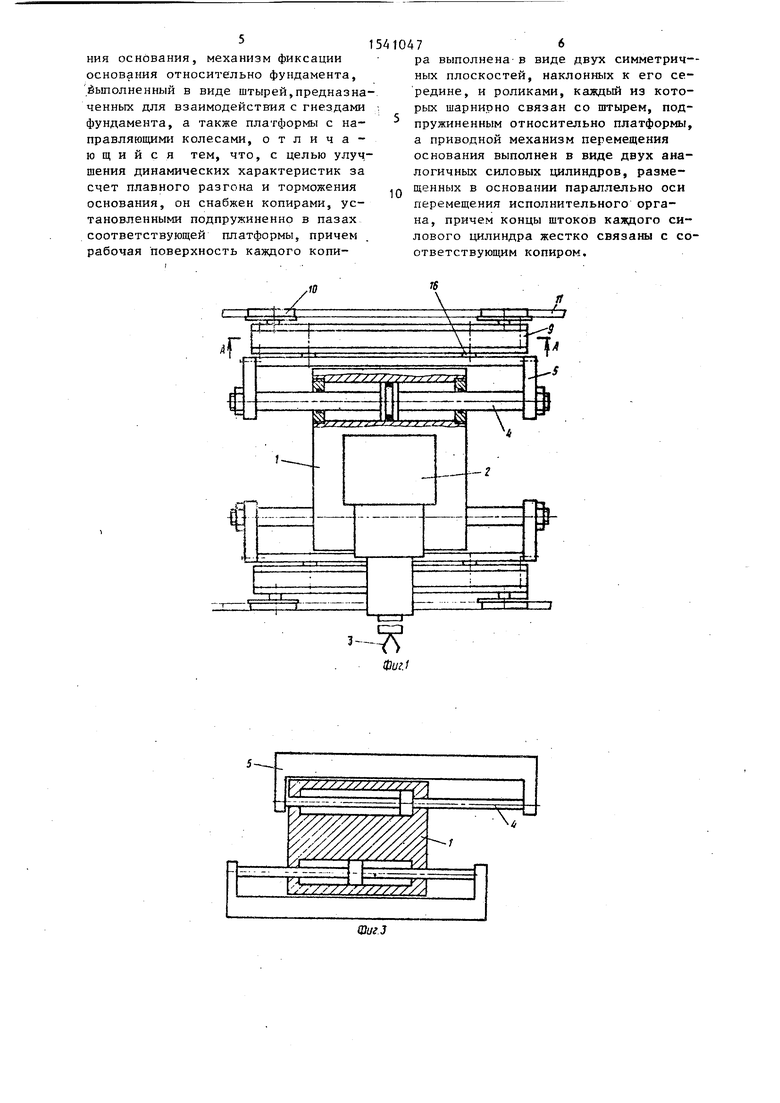
Первая фаза; работает верхний силовой цилиндр, при этом его ьток 4 выдвигается вправо, через panv 5 движение передается на копир 6, который смещается вправо до упора своим торцом во внутренним торец платвода а; чпогичны рассмотренной, после чего их взаимлса положение соответствует показанному на фиг.4„ При этом рамп 5 уже совершили ход на ш; г впрэ jo, а основание I еще .гея в иг- одном положении. Для совершения хода -i i ii-ar следует подать рабочую среду т, чравые (фиг.4) торцы поршней обо- iv сигговых цилиндров, при этом ос ис-зскио 1 сместится вправо до среднего положения (фиг.З), т.е. на шаг. При ходе до упора в левые торцы поршней (полный ход) получаем двойной шаг перемещения основания 1.
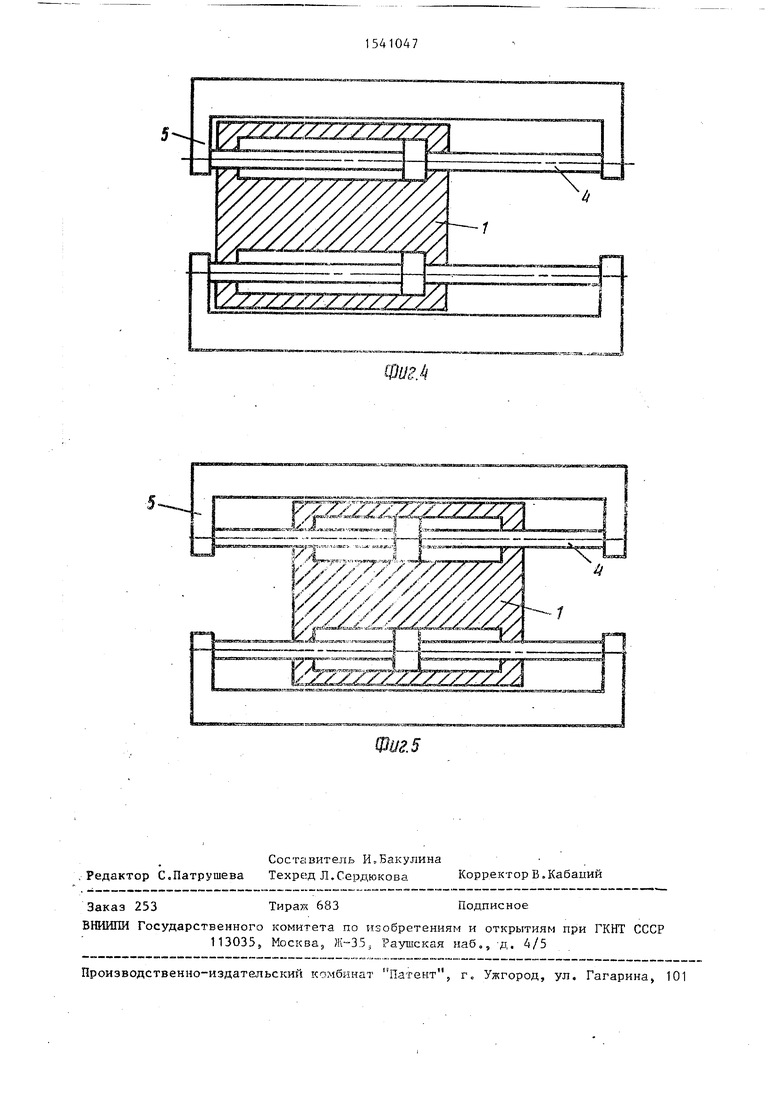
Третья заключительная фаза шагового перемещения - движение основания 1 вправо на шаг, включение обо- иу силовых цилиндров на ход вправо, после чего взаимное положение основных элементов привода соответствует исходному (фиг.5 и 1). При выполнении третьей фазы возможно получение двойного шага., если силовые цилиндры делают полный ход, т.е. до упора своими поршнями в левые (фиг.5) торцы основания 1„
Формула изобретения
Транспортный робот, содержащий основание, установленный на нем исполнительный орган с захватным устройством,, приводной механизм перемеще1У / jf ///////////// I. ТТ и 77 .т
X
Ой/г.4
| Транспортный робот | 1985 |
|
SU1341018A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
