00 со со
О5
Изобретение относится к машиностроению и может быть использовано для двухсторонней обработки деталей типа шатунов на станках непрерывного действия.
Цель изобретения - повышение производительности и упрощение конструкции комплекса путем обеспечения двухсторонней автоматической обработки на одном станке, сокращения количества промышленных роботов и ликвидации межстаночного транспорта.
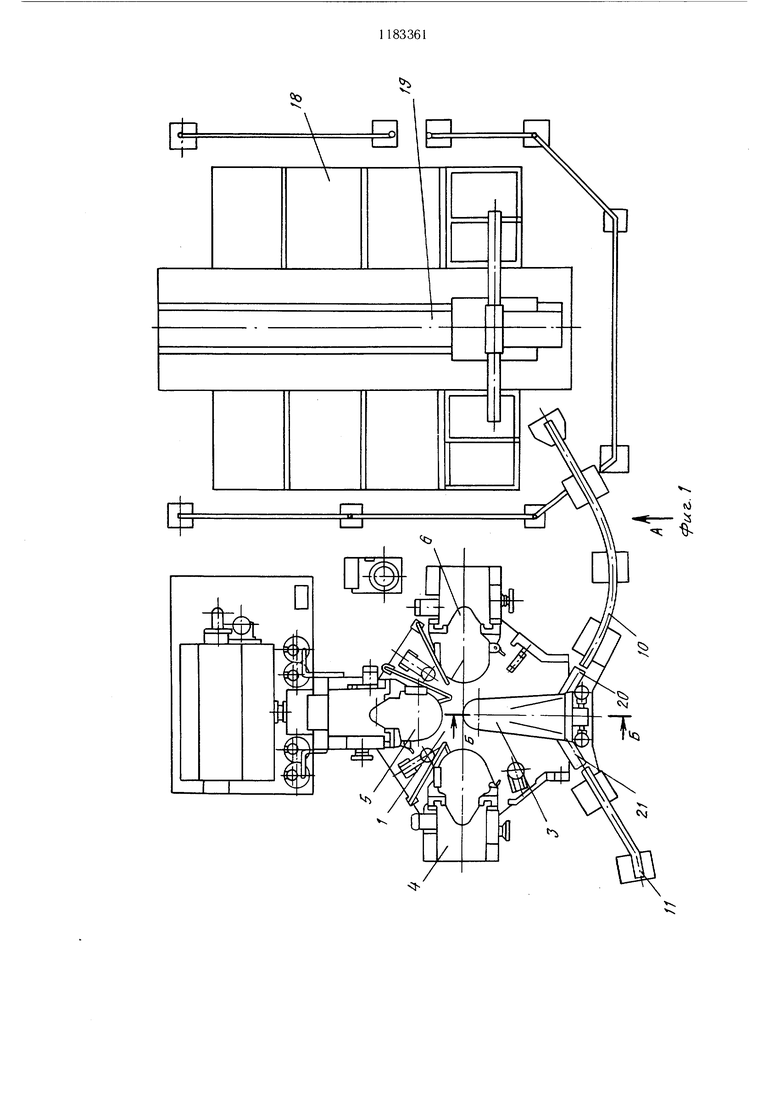
На фиг. 1 изображен предлагаемый комплекс, план; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - схема работы захватов промышленного робота в зависимости от положения баз приспособления под захватами.
Комплекс состоит из плоскошлифовального станка 1 непрерывного действия, оснащенного трехзахватным промышленным роботом 3, приспособления 2 для закрепления деталей. Станок 1, например трехшпиндельный, содержит три шлифовальные бабки 4-6 со шлифовальными кругами для обработки изделий, расположенных на столе 7, имеющем установчные базы - «низкие 8 (загрузочная позиция) и «высокие 9 (разгрузочная позиция), причем «низкие базы 8 служат для укладки заготовок, а «высокие базы 9 - для укладки заготовок, обработанных с одной стороны. В зонах загрузки и разгрузки расположены соответственно подводящее 10 и отводящее 11 транспортные устройства. Промышленный робот 3 выполнен с тремя захватами: правый захват 12 предназначен для загрузки станка 1, т. е. укладки заготовок на «низкую базу 8, средний захват 13 - для снятия заготовок с низкой базы 8, поворотаее на 180° и укладки ее на «высокую базу 9, левый захват 14 - для выгрузки детали со станка 1, т. е. снятия ее с «высокой базы 9.
Таким образом, правый захват 12 взаимодействует с «низкой базой 8, а левый захват 14 - с «высокой базой 9, средний захват 13 оснащен устройством 15 для поворота детали на 180° вокруг горизонтальной оси.
Захваты 12-14 смонтированы на общем подвижном основании 16. Привод их вертикального перемещения выполнен в виде одного двигателя, например гидроцилиндра 17, который взаимодействует с основанием 16.
Комплекс содержит также накопитель 18 и робот 19. К станку 1 крепятся кантователи 20 и 21 соответственно загрузки и разгрузки.
Комплекс работает следующим образом. Робот 19 берет из накопителя 18 пакет деталей (5 шт.) и переносит их в подводящее транспортное устройство 10. Затем детали (по одной) попадают на кантователь
0 10 загрузки. Затем детали (по одной) попадают на кантователь 20 загрузки, который подает детали в правый захват 12 промышленного робота 3, При работе станка 1 часть заготовок находится в зоне обработки, а другая часть - в зоне загрузки - выгрузки.
Робот 3 совершает из верхнего исходного положения движение вверх-вниз во время каждого полуцикла (за время цикла принято время, соответствующее интервалу между выдачей каждого следующего готового изде0 ЛИЯ из станка), при этом каждый раз, когда захваты 12-14 взаимодействуют с деталями, находящимися на базах 8 и 9 приспособления 2, робот 3 следует за столом 7 с его скоростью, а после съема деталей с баз или после установки их на базы он воз5 вращается в исходное положение.
При подходе «низкой базы 8 в позицию, находящуюся под средним захватом 13, и следующей за ней «высокой базы 9 под левый захват 14 основание 16 с захватами 12-14 движется вниз, работают только левый 14 и средний 13 захваты: левый захват 14 снимает готовую деталь с «высокой базы 9 и укладывает ее в кантователь 21 разгрузки, а средний захват 13 снимает заготовку, обработанную с одной стороны, и во время подъема робота 3 поворачивает ее на 180°, т. е. обработанной стороной вниз. В это время в верхнем положении в правый захват 12 подается заготовка из транспортного подводящего устройства 10.
0 Во время следующего полуцикла, т. е. при подходе «высокой базы 9, с которой только что была снята готовая деталь, под средний захват 13 робота 3, а «низкой базы 8, с которой средний захват 13 снял заготовку, обработанную с одной стороны, под правый
5 захват 12, работают только средний захват 13 и правый захват 12 робота 3. При этом средний захват 13 укладывает повернутую на 180° деталь на «высокую базу 9, а правый захват 12 кладет заготовку на «низкую базу 8 и т. д.
в-в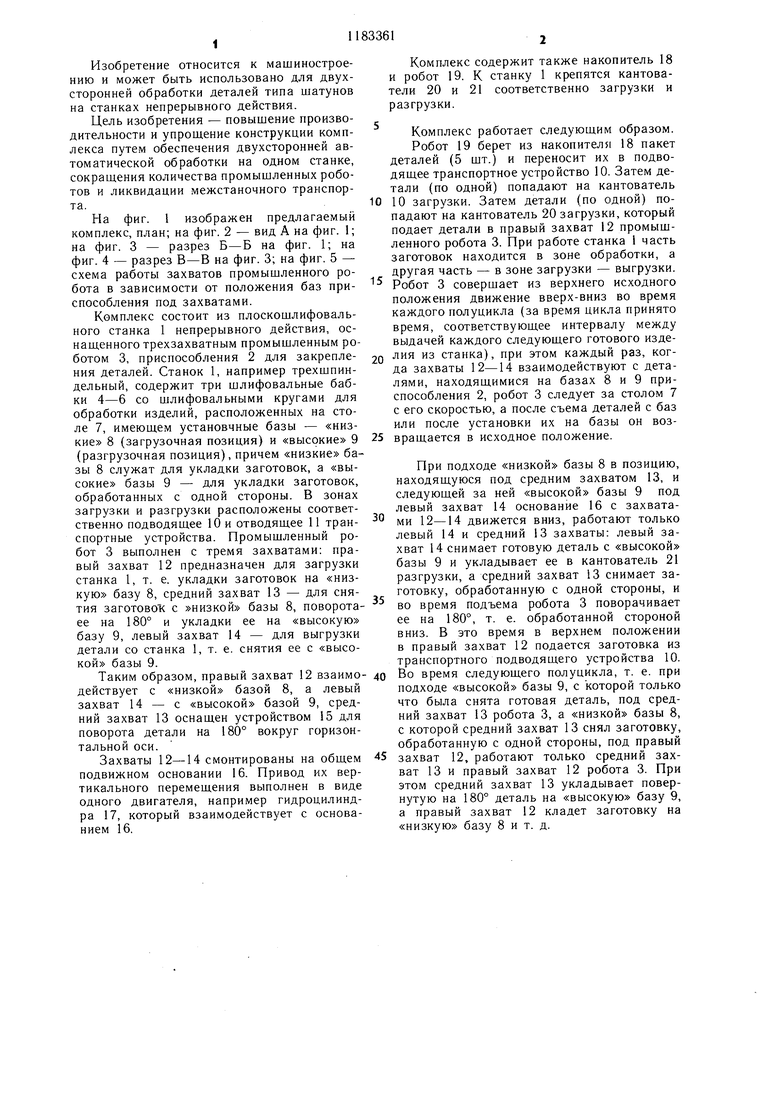
| название | год | авторы | номер документа |
|---|---|---|---|
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Гибкая производственная система для обработки деталей типа валов | 1986 |
|
SU1371868A1 |
| Роботизированный комплекс | 1990 |
|
SU1764952A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Манипулятор плоскошлифовального станка | 1990 |
|
SU1764986A1 |
| Транспортный робот | 1985 |
|
SU1341018A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Манипулирующее устройство | 1983 |
|
SU1146194A2 |
| Автоматическая линия механической обработки | 1983 |
|
SU1191260A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |


КОМПЛЕКС ПЛОСКОШЛИФОВАЛЬНЫЙ АВТОМАТИЧЕСКИЙ ДЛЯ ДВУХСТОРОННЕЙ ОБРАБОТКИ ДЕТАЛЕЙ типа шатунов, содержащий станок непрерывного действия, включающий поворотный стол, на котором радиально размещены установочные технологические базы, промышленный робот, содержащий основание и захватные устройства, и транспортную систему, состоящую из проводящего и отводящего транспортных устройств, отличающийся тем, что, с целью повыщения производительности и упрощения комплекса, он снабжен двумя кантователями, каждый из которых установлен с возможностью взаимодействия с промышленным роботом, причем один кантователь установлен с возможностью взаимодействия с подводящим транспортным устройством, а другой - с отводящим транспортным устройством, смежные технологические базы установлены на разных уровнях, а промышленный робот выполнен с тремя захватными устройствами, смонтированными на основании, при этом среднее захватное устройство снабжено меi ханизмом ротации и установлено с возможностью взаимодействия со смежными техно(Л логическими базами, а каждое крайнее захватное устройство установлено с возможностью взаимодействия с одной из смежных технологических баз.
гУп
8
Фиг. 5
| Предохранительное приспособление для многоступенчатых коробок скоростей самодвижущихся экипажей | 1927 |
|
SU10036A1 |
| Settimo, Torino, 11 (Jtaly), 1956. | |||
