Изобретение относится к подъемно-транспортному оборудованию.
Цель изобретения - повышение надежности путем исключения перекоса грузоподъемной платформы и рычагов в системах.
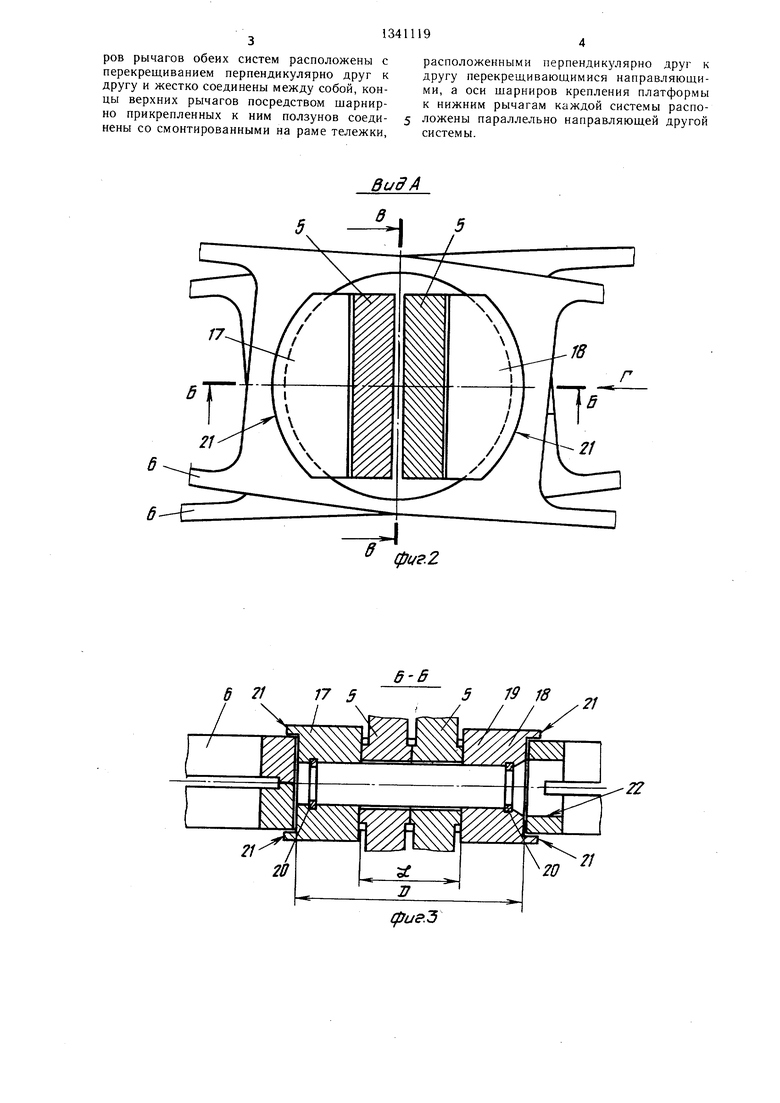
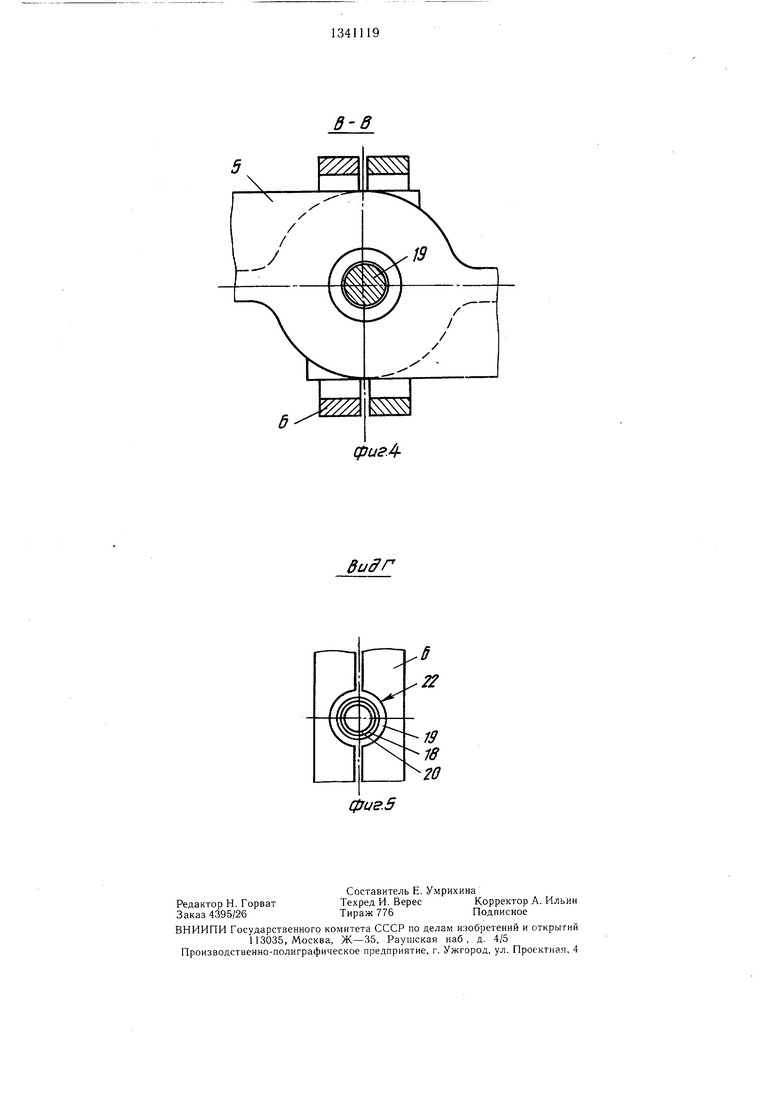
На фиг. 1 схематически изображен кран- штабелер, общий вид; на фиг. 2 - вид А на фиг. 1, (центральный шарнирный узел); на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - вид Г на фиг. 2.
Кран-штабелер содержит приводную тележку 1, перемещаюш.уюся по рельсовым путям 2, грузоподъемную платформу 3 с расположенным на ней.захватом 4 для грузов. Тележка 1 соединена с грузоподъемной платформой 3 двумя расположенными перпендикулярно друг другу шарнирно-ры- чажными системами 5 и 6 типа нюрнбергские ножницы с центральными 7 и боковыми ося- . ми 8-10. Верхние оси 9 боковых шарниров снабжены ползунами 11 с возможностью перемеш,ения по направляющим 12 приводной тележки 1. В нижней части систем на концах нижних рычагов 13, не связанных с другими рычагами систем, закреплена платформа 3 посредством шарниров, оси 14 которых расположены параллельно соответствующим осям направляющих другой системы. Подъем и опускание грузоподъемной платформы 3 осуществляется канатом 15 грузоподъе.много механизма 16.
Центральная ось 7 шарнира состоит из двух сегментов 17 и 18, диаметр которых равен диаметру центрального отверстия рычага рычажной системы 6. Между сегментами на оси 19 размещены с возможностью поворота рычаги рычажной системы 5.
Рычаги рычажной системы 6 охватыванэт снаружи сегменты 17 и 18, которые являются осью вращения для них, геометрическая ось которой расположена под прямым углом к оси 19. Стопорные кольца 20 фиксируют положение сегментов 17 и 18 относительно оси 19 (выдерживается постоянным расстоянием между сегментами Ьи диаметр D).
Буртики 21 фиксируют положение осей 7 относительно рычагов рычажной системы 6. Для осуществления сборки центральной оси 7 в каждой паре рычагов рычажной системы 6 предусмотрено отверстие 22, через которое заводится ось 19 и стопорное кольцо 20 в отверстия сегментов 17 и 18.
Кран-штабелер работает следующим образом.
В исходном положении приводная тележка 1 крана-штабелера неподвижна, грузоподъемная платформа 3 с грузом на захвате 4 находится в нижнем положении. При подъеме груза канат 15, наматываясь
на барабан грузоподъемного механизма 16, поднимает грузоподъемную платформу 3, которая через оси 14 шарниров и рычаги 13 воздействует на оси 10 шарниров, кото- рые вместе с нижними концами рычагов систем 5 и 6 расходятся в стороны от оси колонны. Так как рычажные системы 5 и 6 кинематически связаны между собой с помощью центральных осей 7, то аналогично
д осям 10 изменяют свое положение в пространстве (расходятся) и боковые оси 8, и верхние оси 9, ползуны 11 которых перемещаются вдоль направляющих 12, в результате чего рычажные системы 5 и 6 складываются синхронно и платформа 3 с грузом
5 поднимается без раскачивания и перекоса. Аналогично происходит синхронное раздвигание рычагов рычажных систем 5 и 6 при опускании груза, когда оси 8-10 боковых шарниров сходятся к оси колонны.
0 Инерционные нагрузки, возникающие при разгоне, торможении и прохождении криволинейных участков пути и действующие горизонтально (перпендикулярно оси рычажных систем), можно представить в
5 виде двух составляюп1их, действующих в плоскостях подвижности рычагов, где системы 5 и 6 имеют максимальную жесткость. Такое приложение нагрузки не вызывает искривление оси рычажной системы типа норнбергские ножницы и складывание или
0 раздвигание ее рычагов, т.е. под действием инерционных нагрузок перекос грузонесу- щей платформы 3 и искривление оси колонны также не происходит.
Предложенная конструкция крана исключает перекос грузонесущей платформы
5 с грузом и искривление оси колонны при подъеме и опускании груза и в процессе транспортирования последнего за счет выполнения рычагов систем кинематически взаимосвязанными друг с другом в районе
0 центральных щарниров.
Формула изобретения
Кран-штабелер, содержащий приводную тележку, колонну, выполненную в виде расположенных в вертикальных плоскостях одной и другой систем, соединенных между собой посредством центральных и боковых шарниров с образованием нюрнбергских ножниц рычагов и связанную верхними рычагами с рамой тележки, грузоподъемную платформу с захватом для грузов, шар- нирно прикрепленную к нижним рычагам систем и привод под ьема грузоподъемной платформы, размещенный на раме и связанный посредством гибких органов с ней.
отличающийся тем, что, с целью повышении надежности путем исключения перекоса грузоподъемной платформы и рычагов в системах, оси поворота центральных шарни13411194
ров рычагов обеих систем расположены срасположенными перпендикулярно друг к
перекрещиванием перпендикулярно друг к
другу перекрещивающимися направляющидругу и жестко соединены между собой, кон-ми, а оси щарниров крепления платформы
цы верхних рычагов посредством шарнирк нижним рычагам каждой системы распоно прикрепленных к ним ползунов соеди- 5 ложены параллельно направляющей другой йены со смонтированными на раме тележки,системы.
другу перекрещивающимися направляющими, а оси щарниров крепления платформы
к нижним рычагам каждой системы распоBuff А
фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-штабелер | 1976 |
|
SU593990A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Устройство для подъема и установки груза | 1979 |
|
SU861282A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Тележка - штабелер Калюжного В.В. | 1989 |
|
SU1676902A1 |
| Стеллажный кран-штабелер | 1986 |
|
SU1402521A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Стеллажный кран-штабелер | 1981 |
|
SU984944A1 |
| Подъемник | 1987 |
|
SU1472427A1 |
| ГРУЗОВАЯ ПЛАТФОРМА КРАНА-ШТАБЕЛЕРА | 1972 |
|
SU332025A1 |
Изобретение относится к нодъемно- транспортному оборудованию и может быть использовано в конструкциях кранов-шта- белеров для точного перемещения грузов, которые хранятся в специальной таре или на поддонах, в стеллажах или штабелях. Цель изобретения - повышение надежности путем исключения перекоса грузоподъемной платформы и рычагов в системах. Кран- штабелер содержит приводную тележку 1, грузоподъемную платформу 3 с захватом 4, которые соединены между собой колонной, выполненной в виде двух расположенных перпендикулярно одна другой систем 5 и 6 рычагов типа нюрнбергские ножницы с боковыми и центральными шарнирами. Оси 7 врашения центральных шарниров систем выполнены жестко связанными между собой и перпендикулярно одна другой, благодаря чему обеспечивается синхронное складывание или раздвигание рычагов систем при подъеме или опускании груза грузоподъемным механизмом 16. Это исключает перекос грузоподъемной платформы 3 с грузом. 5 ил. 16 (Л с со 4; со
сриеЗ
фиг.4duffr
фие.В
| Кран-штабелер | 1976 |
|
SU593990A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
