Изобретение относится к транспортным средствам, в частности, к ручным грузоподъемным тележкам для подъема, штабелирования и транспортировки штучных грузов.
Цель изобретения - повышение эксплуатационных качеств.
На фиг. 1 показана тележка-штабелер, вид сбоку, в рабочем положении с поджатыми грузоподъемными вилами к стойкам; на фиг, 2 - узел соединения горизонтальной рамы с вертикальной стойкой; на фиг. 3 - узел крепления грузоподъемных вил с подвижной рамкой; на фиг. 4 - тележка в сложенном положении; на фиг. 5 - конструкция каретки тележки; на фиг. 6 - схема, показывающая конструкцию механизма подъеме и опускания грузоподъемных вил; на фиг. 7 - тележка-штабелер с частично поднятой кареткой и частично выдвинутыми грузоподъемными вилами, общий вид.
Тележка-штабелер состоит из вертикальных стоек 1, к которым с помощью поворотных шарниров 2 прикреплена горизонтально расположенная рама 3,.несущая неповоротные 4 и поворотные 5 колеса. На вертикальных стойках 1 расположена подвижная каретка, состоящая из двух рамок; подвижной 6 и неподвижной 7, которые связанымежду собой перекрещивающимися рычагами 8, образующими нюрнбергские ножницы. К нижней части подвижной рамки 6 прикреплены с помощью пальца 9 грузоподъемные вилы 10. В нижней части вертикальных стоек 1 со стороны поворотных колес 5 расположен рычаг 11 управления тележкой, который прикреплен к стойкам 1 с помощью шарнира 12. Это основные узлы, из которых состоит тележка.
В нижней части стоек 1 на шарнире 13 закреплена защелка 14, нормальное положение которой (фиг. 1 и 2) обеспечивается пружиной 15. При нажатии на защелку (направление давления показано стрелкой) пружина 15 сжимается и защелка 14 утапливается внутрь стоек 1, при этом освобождается шарнир 2, что позволяет осуществить поворот горизонтальной рамы 7 в направлении по часовой стрелке и расположить раму 3 в вертикальной плоскости, параллельно стойкам 1. Пом возврате рамы 3 в исходное положение, ее вращают в противоположном направлении до упора 16 (он препятствует опрокидыванию стоек 1 в направлении по часовой стрелке) и, когда рама займет горизонтальное положение, пружина 15 вытолкнет защелку 14, зафиксировав шарнир 2 и обеспечив жесткость соединения рамы 3 со стойками 1.
Аналогично выполнен механизм поворота грузоподъемных вил 10. Они прикреплены к подвижной рамке 6 с помощью пальца 9 и имеют возможность поворачиваться в вертикальной плоскости. Защелка к а вилах 10 отсутствует, так как в ней нет необходимости: рабочая часть вил 10 (на фиг. 3 слева) имеет большую массу, поэтому аилы 10 всегда будут располагаться под соб0 ственным весом в горизонтальной плоскости. Между пальцем 9 и задней торцовой стенкой 17 вил 10 размещена пружина 18 растяжения, а в боковых поверхностях вил 10, со стороны их рабочего участка, имеются
5 пазы 19 для прохода пальца 9. При нажатии на зилы со стороны рабочего (переднего) торца (направление давления на фиг. 3 обозначено двойной стрелкой), пружина 18 растягивается, вилы 10 откатываются на0 зад, перемещая паз 19 относительно пальца 9.
Это позволяет смягчить удар вил 10 о транспортируемый груз, в случае упора вил 10 в последний при подъезде тележки. При
5 складывании рамы 3 и вил 10 тележка принимает плоский вид, при этом, опуская каретку вниз до упора в торец рамы 3, предотвращается самопроизвольное раскладывание тележки ; вилы 10 не позволяют
0 вращаться раме 3 (для этого вилы 10 должны повернуться по часовой стрелке, что невозможно, так как они упираются в рамку 6), а рзму 3, в свою очередь, фиксируют вилы 10, не позволяя ей вращаться по часовой стрел5 ке (задняя часть вил 10 опирается в раму 3). Таким образом, имея возможность поворота вил 10 и рамы 3, тележка может компактно собираться в плоскую неразборную конструкцию, удобную при хранении и при
0 транспортировании ручным способом; поворотные колеса 5 выступают за габариты стоек 1. Это позволяет тележку транспортировать, поддерживая ее только за один край, а второй край.оперев на колеса 5, ка5 тать по грунту.
Каретка тележки состоит из подвижной 6 и неподвижной 7 рамок, которые связаны между собой рычажным механизмом из перекрывающихся рычагов 8. Один из рычагов
0 8 на неподвижной рамке 7 имеет возможность перемещаться относительно паза 20 (и соответствующий рычаг 8, взаимодействующий с подвижной рамкой 6 с пазом 21) и связан с приводом его перемещения, вы5 полненным в виде троса 22, огибающего блок 23 и связанного свободным концом с втулкой 24, в которой имеется отверстие 25. S соответствии с формой втулки 24 в приводном рычаге 11 тележки имеется углубле- ние 26, форма и размеры которого
соответствуют втулке 24. При вертикальном расположении приводного рычага 11 отверстия 25 и 27, имеющиеся в углублении 26, совпадают и в образовавшийся сквозной канал устанавливают съемный фиксатор 28. При отводе рычага 11 от стоек 1 происходит натяжение троса 22, что вызывает поворот рычагов 8 и выдвижение грузоподъемных вил 10 (направление движения приводного рычага 11 на фиг. 5 показано стрелкой). Возврат вил 10 в исходное положение производится установкой втулки 24 на прежнее место и с помощью возвратной пружины 29. При выдвижении вил 10 за центр тяжести тележки, ее опрокидывание исключается, так как грузчик, прикладывая усилие к рыча-. гу 11, создает собственной массой противовес. Разумеется, при выдвижении вил 10 колеса 4 и 5 тележки фиксируются тормозом, что предупреждает возможную инерционную откатку тележки.
Привод подъема и опускания тележки выполнен следующим образом (фиг. 6). По обе стороны от приводного рычага 11 имеются намоточные барабаны 30, с одной стороны - храповое колесо 31, между которым и барабаном 30 имеется рычажная муфта 32, приводимая в движение рычагом 33. Необходимость муфты 32 поясняется тем, что в период выдвижения вил 10 необходимо отсоединить храповое колесо 31 от барабана и движением того же рычаге 11 воздействовать на перекрещивающиеся рычаги 8, при этом положение вил 10 по высоте не должно изменяться. Храповое колесо 31 входит в зацепление с защелкой 34 (собачка), расположенной на рычаге 11 и откидывающейся при повороте рычага 35, связанного с ней через тягу 36. При повороте (нажатии) рычага 35 вилы 10 с кареткой под собственным весом опускаются вниз.
Дальнейшая сущность изобретения поясняется совместно с принципом работы предложенной тележки-штабелера. Тележку в сложенном положении (фиг. 4) транспортируют к месту эксплуатации. Далее ее располагают в горизонтальной плоскости таким образом, чтобы вилы 10 и рама 3 оказались сверху, Перемещая каретку вдоль направляющих, высвобождают раму 3 и поворачивают ее з направлении по часовой стрелке до тех пор, пока защелки 14 не зафиксируют ее относительно стоек 1. Затем тележку поднимают и опирают на колеса 4 и 5. Вилы 10 при этом откинутся и займут горизонтальное положение под собственным весом. Тележка в таком виде готова к эксплуатации (фиг. 1). Затем грузчик подводит тележку к штабелю груза. С помощью рычага 33 фиксируют муфтой 32 храповое колесо 31 с барабаном 30 и, совершая возвратные движения рычагом 11, осуществляет подъем каретки с вилами 10 путем намотки троса 37 на барабаны 30. Одни концы тросов 37 связаны с барабанами 30. а вторые через блоки 38, закрепленные на поперечном элементе 39, - с кареткой. Подняв таким образом вилы 10 до требуемого уровня, тележку перемещают в направлении транспортируемого груза. При этом, если высота расположения вил не соответствует уровню просвета под грузом, вилы 10 упрутся в него, но удара и повреждения не произойдет, так как вилы
10 переместятся по пазам 19 в противоположном направлении. В этом случае изменяют высоту расположения вил 10 до совмещения их с просветом. При этом пружины 18 возвратят вилы з исходное положэние и дальнейшим перемещением тележки в направлении к грузу расположат вилы 10 под грузом. Дальнейшим движением рычага 11 поднимают груз и транспортируют его к месту назначения. Если раму 3 с
колесами 4 и 5 невозможно завести под опору груза, то после выбора уровня вил 10 рычаг 11 устанавливают в вертикальное положение и соединяют его со втулкой 24 посредством фиксатора 28. После этого рычаг
11 отклоняют от стоек 1, тем самым натягивают трос 22, приводя з действие рычажный механизм, с помощью которого происходит выдвижение вил вперед под груз. Зафиксировав вилы 10 в таком положении вращением рычзгз 11 производится подъем груза, после чего рычаги 8 возвращают в исходное положение, перемещая груз к стойкам 1. и тележку с грузом транспортируют к месту назначения. Опускание вил 10 производится путем нажатия на рычаг 35, при этом через тягу 36 защелка 34 освободит храповое колесо 31, и вилы 10 под собственным весом и весом каретки опускаются вниз. Складывание телех ки в походное положение производится в обратном порядке, описанном вначале.
Формула изобретения Тележка-штабелер, содержащая вертикальные стойки, установленные на горизон- тально расположенной раме, которая связана с опорными колесами, размещенную на вертикальных стойках каретку, выполненную с возможностью сертикального
перемещения и связанную с приводом посредством рычага управления, расположенный ка каретке грузозахватный механизм, выполненный с возможностью перемещения в горизонтальном направлении и снабженный приводом, отличающаяся тем.
что. с целью повышения эксплуатационных качеств, рама шарнирно соединена с вертикальными стойками с возможностью поворота в вертикальном направлении, причем на стойках установлены упоры и фиксаторы, обеспечивающие горизонтальное положение рамы, при этом привод каретки выполнен в виде двух тросов, одними концами соединенных с кареткой, а другими концами связанными с барабанами механизма подъема, которые выполнены с возможностью взаимодействия через муфту с храповым колесом, которое выполнено с возможностью взаимодействия с защелкой, установленной на рычаге управления, причем грузозахватный механизм выполнен в виде вил, которые одними концами шарнирно связаны с подвижной в горизонтальном направлении рамкой и подпружинены относительно нее а на боковых поверхностях вил выполнены
продольные пазы, в которых расположены пальцы подвижной рамки, при этом привод перемещения грузозахватного механизма выполнен в виде шарнирно соединенных между собой концами и средними частями
рычагов, одни из которых одними концами шарнирно связаны с кареткой, причем часть из последних подпружинены относительно каретки и выполнены с возможностью пере мещения в вертикальном направлении и соединения с помощью гибкого элемента е рычагом управления.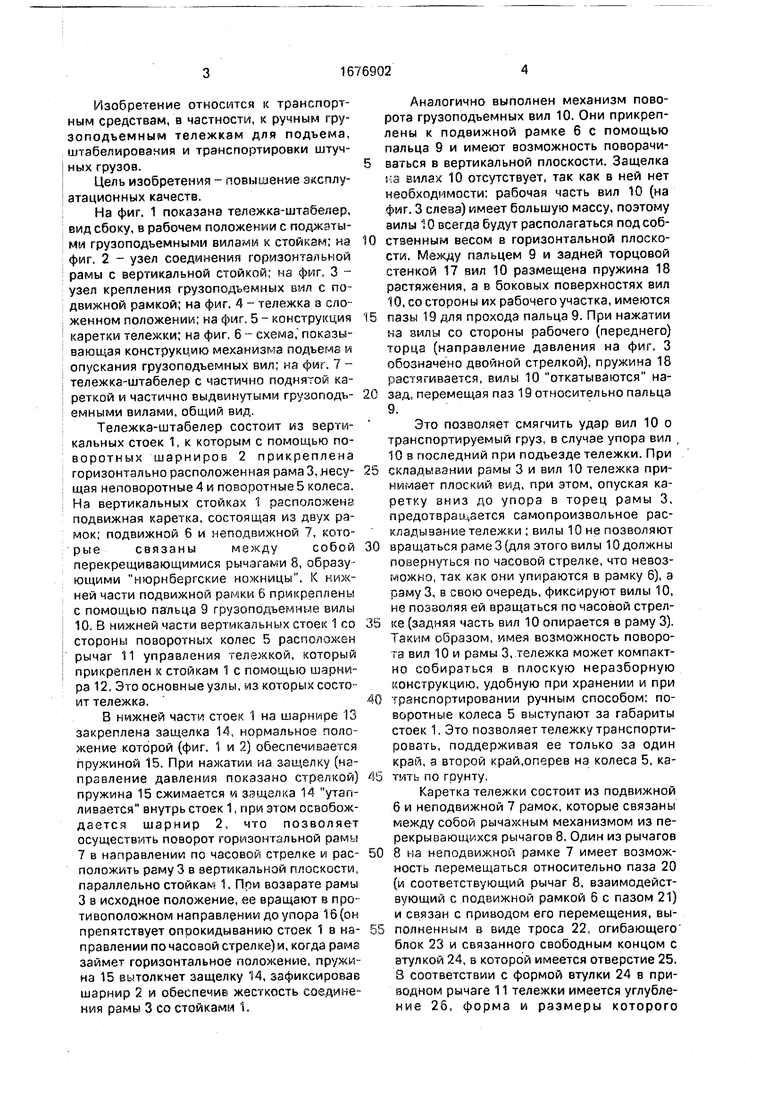

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Высотный кран-штабелер | 1979 |
|
SU844518A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU426938A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU787314A1 |
| Тележка для транспортирования штучных грузов | 1982 |
|
SU1017572A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Склад для хранения штучных грузов | 1984 |
|
SU1211174A1 |
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Ручная тележка-штабелер | 1985 |
|
SU1324905A1 |



Изобретение относится к транспортным средствам, в частности к ручным грузоподъемным тележкам для подъема, штабелирования и транспортировки штучных грузов. Цель изобретения - повышение эксплуатационных качеств. Тележка-штабелер содержит вертикальные стойки 1, шарнирно соединенные с горизонтально расположенной рамой 3. Рама 3 может быть повернута в вертикальной плоскости. На стойках 1 установлена каретка, перемещаемая с помощью механизма подъема. Привод механизма подъема осуществляется от рычага управления 11. На каретке расположен привод грузозахватного механизма, выполненного в виде вил 10. Вилы 10 могут быть повернуты в вертикальной плоскости. Перемещение вил в горизонтальной плоскости осуществляется посредством шарнирно соединенных рычагов 8. Привод рычагов 8 осуществляется от рычага 11. 7 ил. Л fe Os XI Os Ю О ГО ж Риг1
Фиг. 2
| Авторское свидетельство СССР № 1158488, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
