Изобретение относится к швейному оборудованию, а именно к швейным полуавтоматам, и может быть использовано для обработки по контуру швейных изделий или отдельных деталей.
Целью изобретения является повышение точности обработки деталей по заданному контуру.
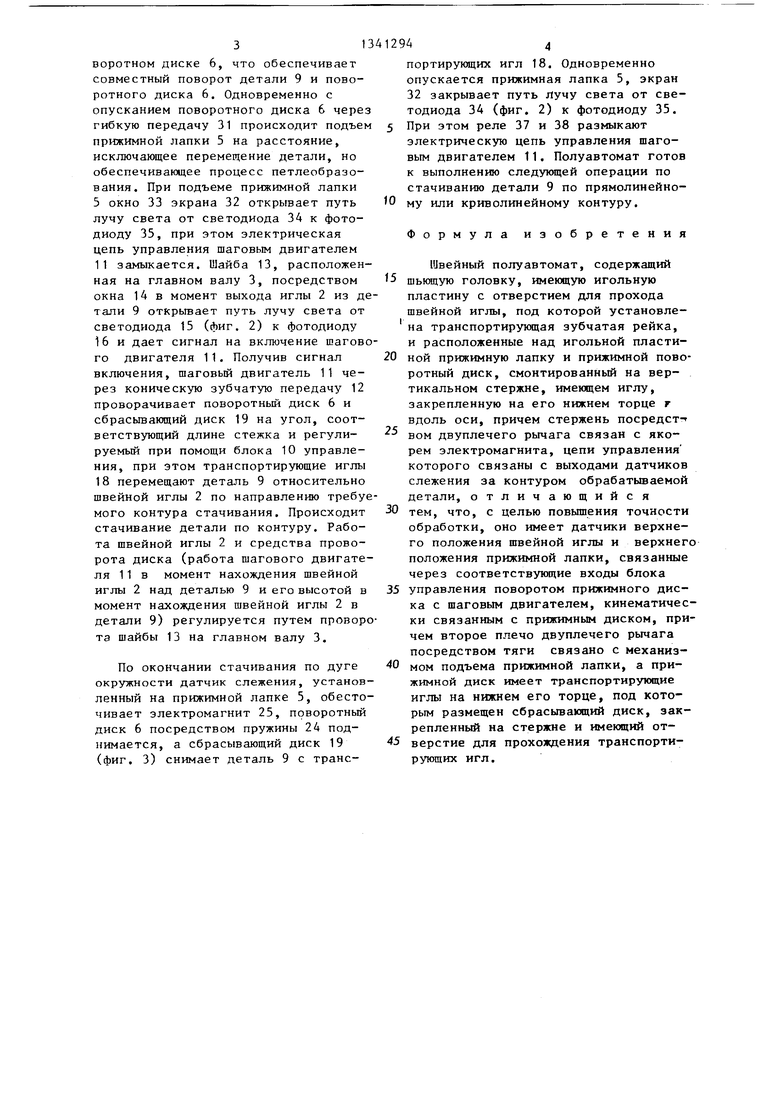
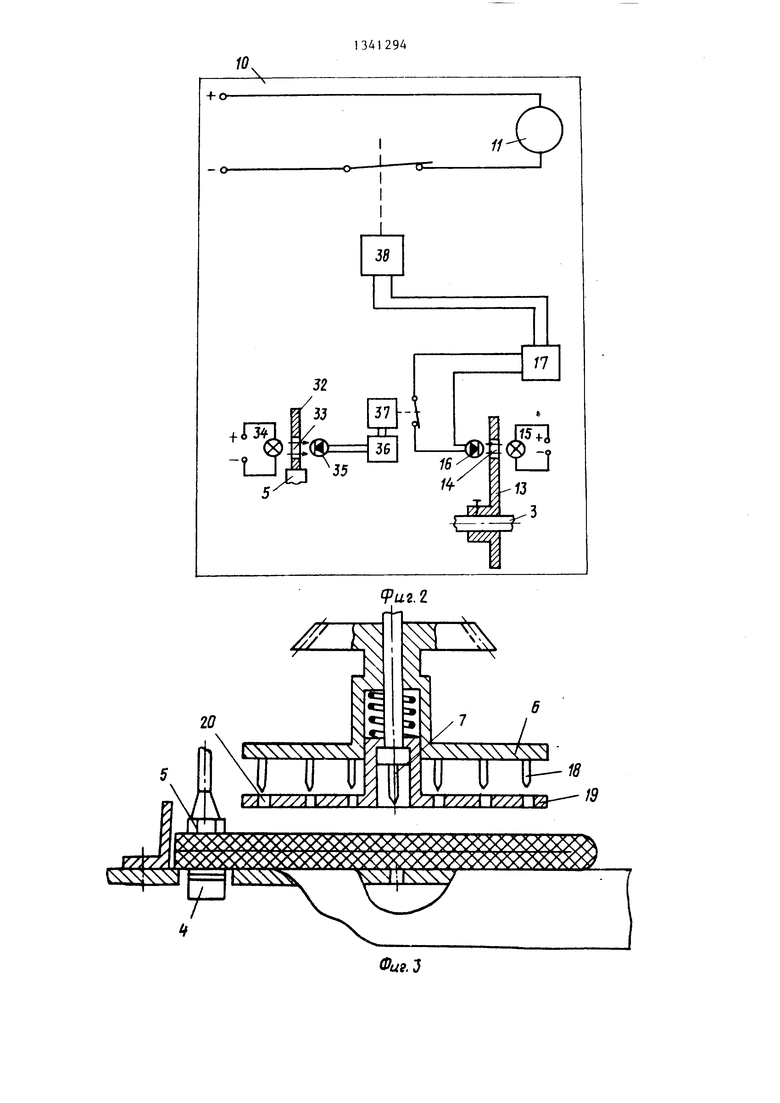
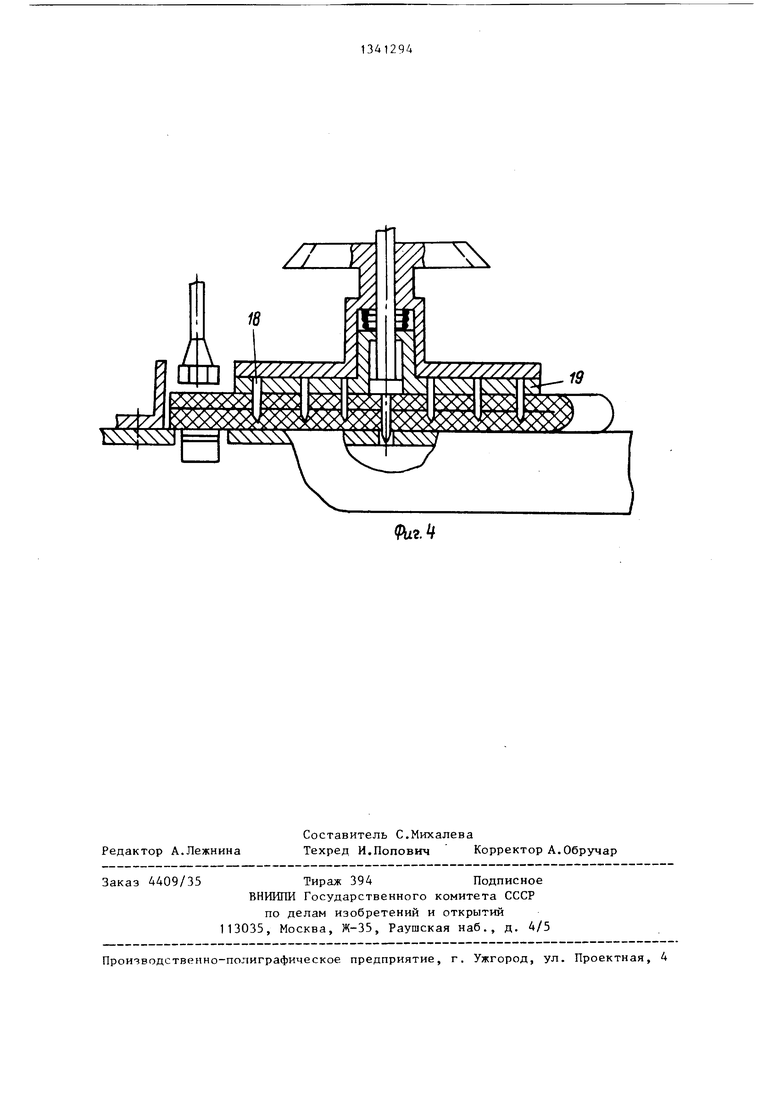
На фиг. 1 изображен швейный полуавтомат, общий вид; на фиг. 2 - принципиальная электрическая схема блока управления поворотом прижимного ,дис- ка, на фиг. 3 и 4 - положение механизмов при стачивании деталей по прямолинейному контуру и по дуге окружности соответственно.
Швейный полуавтомат содержит шьющую головку (фиг. 1), имеющую игольную пластину 1 с отверстием для прохода швейной иглы 2, главный вал 3, транспортирующую зубчатую рейку 4, прижимную лапку 5, подпружиненный прижимной поворотный диск 6 с фиксирующей иглой 7 и направители 8 прямолинейного перемещения детали.
Для проворота диска 6 на требуемую длину стежка в момент нахояСдения игл 2 над деталью 9 устройство содержит электрически связанные между собой блок 10 управления поворотом прижимного диска 6 и шаговый двигатель 11. При этом шаговый двигатель 11 кинематически связан посредством конической зубчатой передачи 12 с поворотным диском 6. Датчик верхнего положения иглы установлен на главном валу 3 и выполнен в виде шайбы 13 с окном 1А, открывающим путь лучу света от светодиода 15 к фотодиоду 16, Для усиления сигнала от- фотодиода 16 предназначен усилитель 17 мощ ности (фиг. 2).
Для проворота детали 9 совместно с поворотным прижимным диском 6 на нижнем торце последнего выполнены транспортирующие иглы 18. Для сбрасывания детали 9 с транспортирующих игл 18 при подъеме диска 6 служит подпружиненный сбрасывающий диск 19, расположенный под поворотным диском 6 и имеющий отверстия 20 для прохождения транспортир гищих игл 18.
Поворотный диск 6 кинематически соединен посредством вертикального стержня 21, двуплечего рычага 22, тяги 23 и пружины 24 с индивидуальным приводом 25, обеспечивающим опускание и подъем диска 6. При опус
5
0
кании диска 6 обеспечивается его ввод в контакт с деталью 9, а при подъеме диск 6 выводится из контакта с деталью 9. Индивидуальный привод 25 выполнен в виде электромагнита, цепи управления которого связаны с выходами датчиков слежения за контуром обрабатываемой детали 9.
Датчики слежения установлена- на прижимной лапке 5 и выполнены в виде, соответственно светодиода 26 - фотодиода 27 и светодиода 28 - фотодиода 29 и через усилитель 30 подключены в цепь управления индивидуальным приводом 25.
Для исключения перемещения детали 9 транспортирующей рейкой 4 в момент ввода диска 6 в контакт с деталью 9 служит гибкая передача 31, соединенная с одной стороны с двуплечим рычагом 22, а с другой стороны - с прижимной лапкой 5.
Для исключения вращения диска 6 в
5 нерабочем положении (крайнее верхнее) служит датчик верхнего положения прижимной лапки 5, выполненный в виде установленного на стержне при жимной лапки 5 экрана 32 с окном 33,
0 открывающим путь лучу света от светодиода 34 к фотодиоду 35 в момент подъема лапки 5, т.е. в момент перемещения детали 9 диском 6 по дуге окружности требуемого контура стачивания.
Блок 10 управления содержит усилитель 36, выход которого соединен с контактным реле 37, а также реле 38 для подключения шагового двигателя 1 1 .
Полуавтомат работает следующим образом.
При стачивании детали 9 (фиг.1) по прямолинейному контуру электро- 5 магнит 25 обесточен, а поворотный диск 6 находится в крайнем верхнем (исходном) положении (фиг. 3). Экран 32 закрывает путь лучу света от светодиода 34 (фиг. 2) к фотодиоду 35 и электрическая цепь управления шаговым двигателем 11 разомкнута. При поступлении сигнала на индивидуальный привод 25 от датчика слежения, установленного на прижимной лапке 5, поворотный диск 6 посредс твом звеньев 23, 22 и 21 опускается. Транспортирующие иглы 18 (фиг. 4) проходят через отверстия 20 сбрасывающего диска 19 и фиксируют деталъ 9 на по5
0
0
5
31
воротном диске 6, что обеспечивает совместный поворот детали 9 и поворотного диска 6. Одновременно с опусканием поворотного диска 6 через гибкую передачу 31 происходит подъем прижимной лапки 5 на расстояние, исключающее перемещение детали, но обеспечивающее процесс петлеобразования. При подъеме прижимной лапки 5 окно 33 экрана 32 открывает путь лучу света от светодиода 34 к фотодиоду 35, при этом электрическая цепь управления шаговым двигателем 11 замыкается. Шайба 13, расположенная на главном валу 3, посредством окна 14 в момент выхода иглы 2 из детали 9 открывает путь лучу света от светодиода 15 (фиг. 2) к фотодиоду 16 и дает сигнал на включение шагового двигателя 11. Получив сигнал включения, шаговый двигатель 11 через коническую зубчатую передачу 12 проворачивает поворотный диск 6 и сбрасывающий диск 19 на угол, соответствующий длине стежка и регулируемый при помощи блока 10 управления, при этом транспортирующие иглы 18 перемещают деталь 9 относительно швейной иглы 2 по направлению требуемого контура стачивания. Происходит стачивание детали по контуру. Работа швейной иглы 2 и средства прово- рота диска (работа шагового двигателя 11 в момент нахождения швейной иглы 2 над деталью 9 и его высотой в момент нахождения швейной иглы 2 в детали 9) регулируется путем проворо та шайбы 13 на главном валу 3.
По окончании стачивания по дуге окружности датчик слежения, установленный на прижимной лапке 5, обесточивает электромагнит 25, поворотный диск 6 посредством пружины 24 поднимается, а сбрасывающий диск 19 (фиг. 3) снимает деталь 9 с транспортирующих игл 18. Одновременно опускается прижимная лапка 5, экран 32 закрывает путь лучу света от светодиода 34 (фиг. 2) к фотодиоду 35. При этом реле 37 и 38 размыкают электрическую цепь управления шаговым двигателем 11. Полуавтомат готов к выполнению следующей операции по стачиванию детали 9 по прямолинейному или криволинейному контуру.
Формула изобретения
Швейный полуавтомат, содержащий шьющую головку, имеющую игольную пластину с отверстием для прохода швейной иглы, под которой установлена транспортирующая зубчатая рейка, и расположенные над игольной пластиной прижимную лапку и прижимной поворотный диск, смонтированный на вертикальном стержне, имеющем иглу, закрепленную на его нижнем торце г вдоль оси, причем стержень посредст-т вом двуплечего рычага связан с якорем электромагнита, цепи управления которого связаны с выходами датчиков слежения за контуром обрабатьшаемой детали, отличающийся тем, что, с целью повышения точности обработки, оно имеет датчики верхнего положения швейной иглы и верхнего положения прижимной лапки, связанные через соответствующие входы блока управления поворотом прижимного диска с шаговым двигателем, кинематически связанным с прижимным диском, причем второе плечо двуплечего рычага посредством тяги связано с механизмом подъема прижимной лапки, а прижимной диск имеет транспортирующие иглы на нижнем его торце, под которым размещен сбрасывающий диск, закрепленный на стержне и имеющий отверстие для прохождения транспортирующих игл.
4-0
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат | 1983 |
|
SU1112075A1 |
| Устройство для управления швейной машиной | 1984 |
|
SU1201374A1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
| Устройство для автоматической подачи и ориентирования плоских заготовок верха обуви на швейной машине | 1990 |
|
SU1759967A1 |
| Устройство для перемещения стачиваемых деталей на швейной машине | 1981 |
|
SU1032061A1 |
| Полуавтомат для стачивания мелких деталей швейных изделий, например манжет мужских сорочек | 1961 |
|
SU144721A1 |
| Механизм петлителя швейного полуавтомата для обработки деталей по замкнутому контуру | 1985 |
|
SU1293258A1 |
| Швейный полуавтомат | 1978 |
|
SU848496A1 |
| Устройство для перемещения деталей по заданному контуру на швейной машине | 1986 |
|
SU1406257A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1969 |
|
SU237577A1 |
Изобретение относится к швейному оборудованию, а именно к швейным полуавтоматам, предназначенным для обработки по контуру швейных изделий или отдельных деталей. Целью изобрезг 31 тения является повышение точности обработки деталей по заданному контуру. Швейный полуавтомат содержит швейную головку, подпружиненный прижимной поворотный диск 6, направите- ли 8 прямолинейного перемещения детали 9, датчики верхнего положения- иглы 2 и верхнего положения прижимной лапки 5, связанные с блоком управления поворотом прижимного диска 6. При этом диск 6 имеет транспорти- рукяцие иглы 18 на нижнем его торце для поворота детали 9 совместно с диском 6, кинематически связанным с шаговым двигателем 11, подключенным к соответствукнцим входам блока управления. 4 ил. г ko Фиг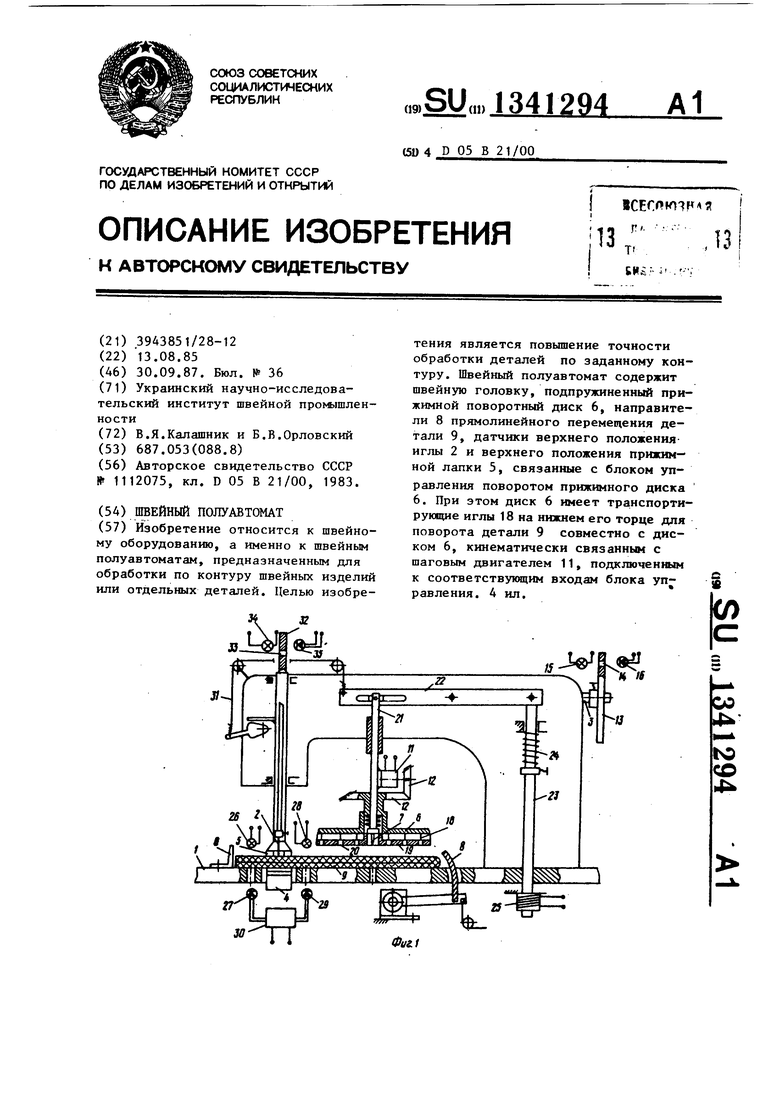
32
(
36
/5 .
W
Фаг. 2
/
Й/гЛ
Р7
// //.
Редактор А.Лежнина
Составитель С.Михалева
Техред И.Попович Корректор А.Обручар
4409/35
Тираж 394Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Швейный полуавтомат | 1983 |
|
SU1112075A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
