11
IlgoRpoTGHHc относится к оборудо- I .iiiii; ;iii ; ijMiiTH3 iponanHi)i.4 т pa испорти п- илкпщгге ubin.ix систем и гибких |(чстт1О1пп.1Х комплексах мехаиическо1 г П;laGo тки де талой .
И юбрртоиия - упеличепие б1л- стродрйствия и попышеиие точности ЦП и .и1с ииронаиу1Я автоматическо; транспортной тележки.
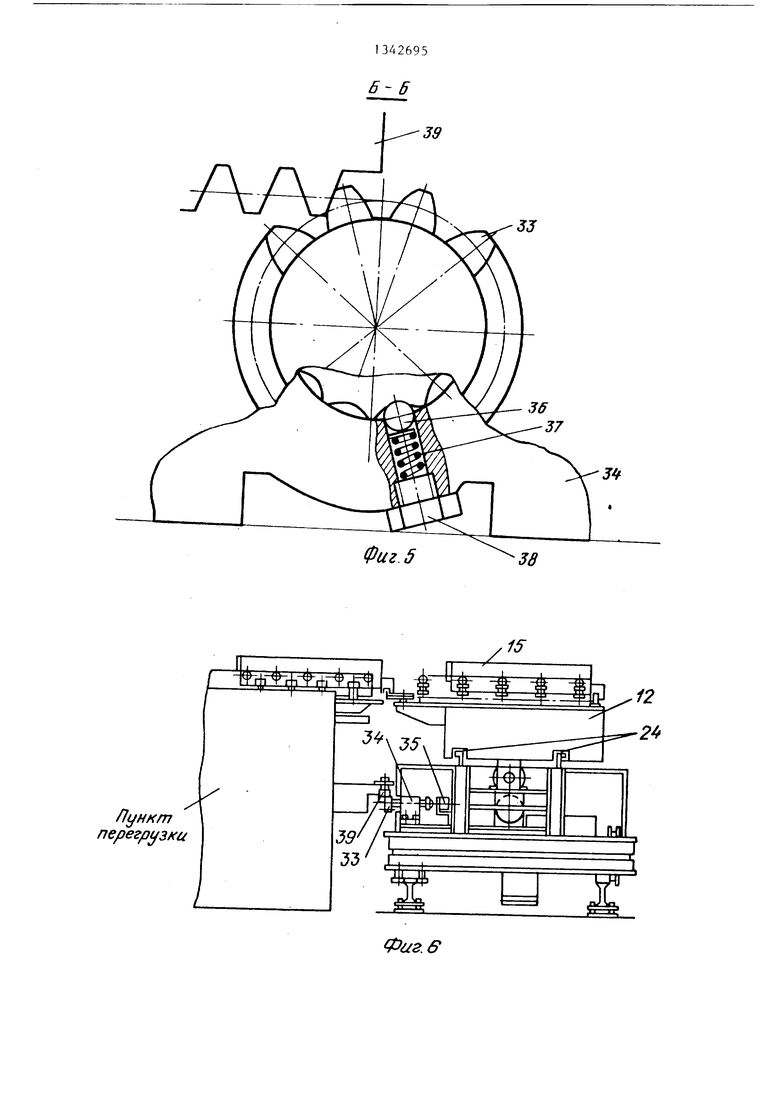
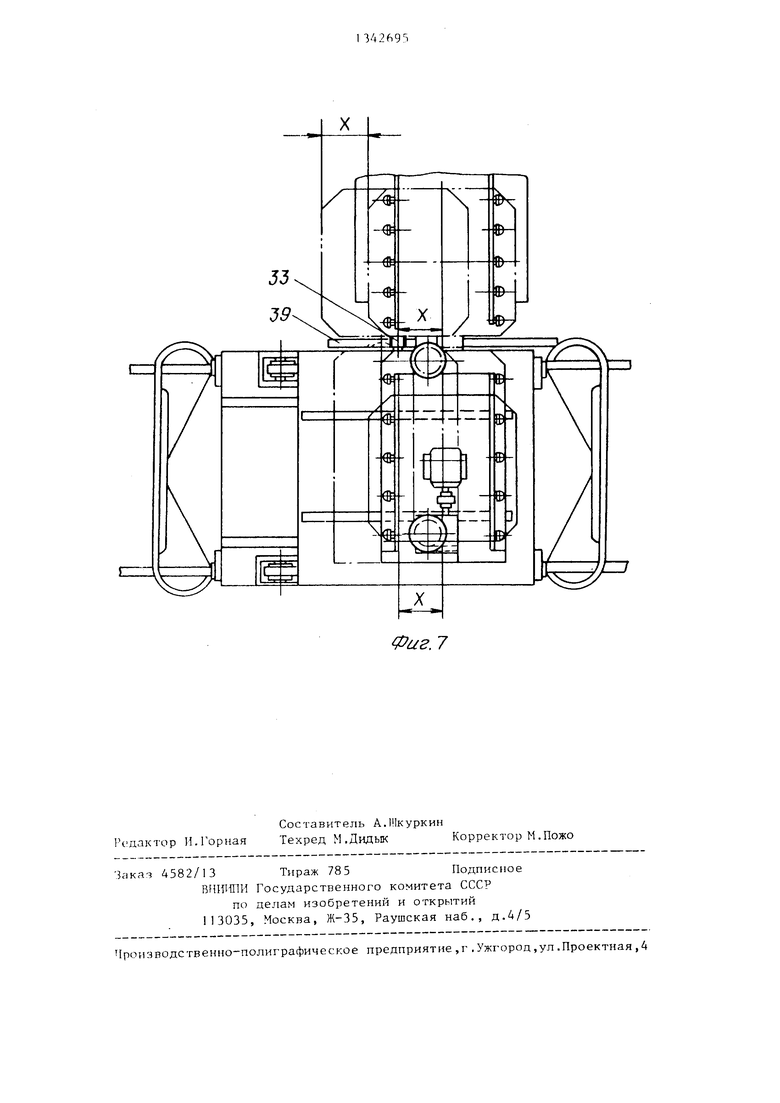
На фиг. 1 изображена автоматическая TiiaifciHip гная тележка со спутником (показан тонкими линиями), общий вил; на фиг. 2 -- то же, вид сверху; на фиг.3 - то же, вид сбоку; на, (1)иг.4 -- сечение Л-Л иа фиг . 2 ;на фиг . 5 ссчение Б-Б Fia фиг . 3 ; на фиг . 6 - тележка и приемная часть станка, иа фиг. 7 - положение палеты на тележке и приемной части станка с HC. L.JU HM-OM или переОегом заданной точ- rai 1то:5и--ионирог а1И я на величину X ( - Г 5ихг1унктирнг,1е ,чинии) .
Ллт.мотическая транспортная тележ- i:.i IP р.кит силовую I с четырь- ходовыми колесами 2, ограничитель- :1 :, г --:м; 3, буфсрньии устройстпа- -14 1 и ;.лект)омагнитными тормозиыми ,: г-1ак;;; ;п 5, нодвешеиными на иружи- ; 1 6, . l.,j си.:1овой раме 1 уста овлен О ь-к ол. Мч гроавтоматики, включающшТ г :. i.; U i)..iK i ов 7, бортовую ) 3, световую сигнализапию 9.
, -.:,,i ,; i,,KCHa припо/дом, состоящим 1-4 электродвигателя 10 и peMeiHioii пеi , --ЗЧИ 1 1 .
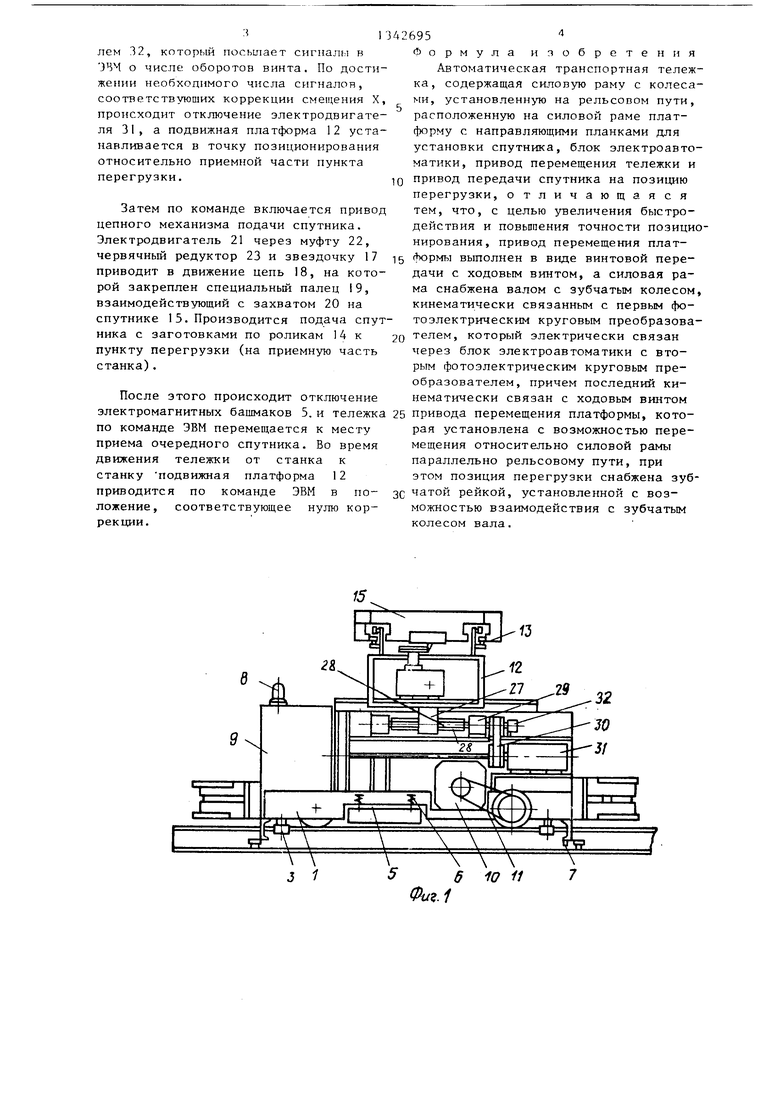
Ml -иловой рлмс установлена noxi- : . ;-1 Г ;|Ьорма 12 с напрачляюпи1ми 1.1, на 11;.кчиках 14 которой неремешает- iMiyiffHK с обрабатьтаемыми кор- иуснмми /юталями к пункту ттерет рузки i. iipMMC п к столу обрабатывающего стан ;; ппт -; ;;О ОГ1 1 -и хашгчма ггода- чи спутника. Этот механизм включает ;- ) I fi i; 17, си aiibiuO р тлико- вой нен11Ю 18 со спеп.иальпым пальдем 1, H3n;i; o, M CTtiyioi;u N с захватом 20 у ЛИ: -,. S. .n, цепного механизма П пдачи спутиика осутестнляется от ..- 1ро;и игатоля 21 через муфту 22 If червячньгй редуктгтр 23. Силовая ра- м.; 1 cniG-жена ,v; г;1.;.Н ительпы п-1 направл:-и:мими .папками 2 i пля перемеиеггия i;-i р. ;:л-ельпс р1 Л1-,соному пут 25 на ро- ликоонорах 26 подвижной илатформы 12. У i .::-г ::и И:и. :;осле; нсй осуществляется приводом, состоящим из маточной гай- к.и 27, г; ;:крег1лспн(5й к подвижной плат- (liopr- e, л;о:п1(ог-о винта 28, вза№ одей
952
ствуютего с -зтой г-айкоГ; и установле - ного в подшипниках 29. Ходовой винт 28 соединен зубчатореме ной переда- чеГ 30 с электродвигателем 31. На ходовом установлен фотоэлектри- чес:кий круговсп преобразователь 32.
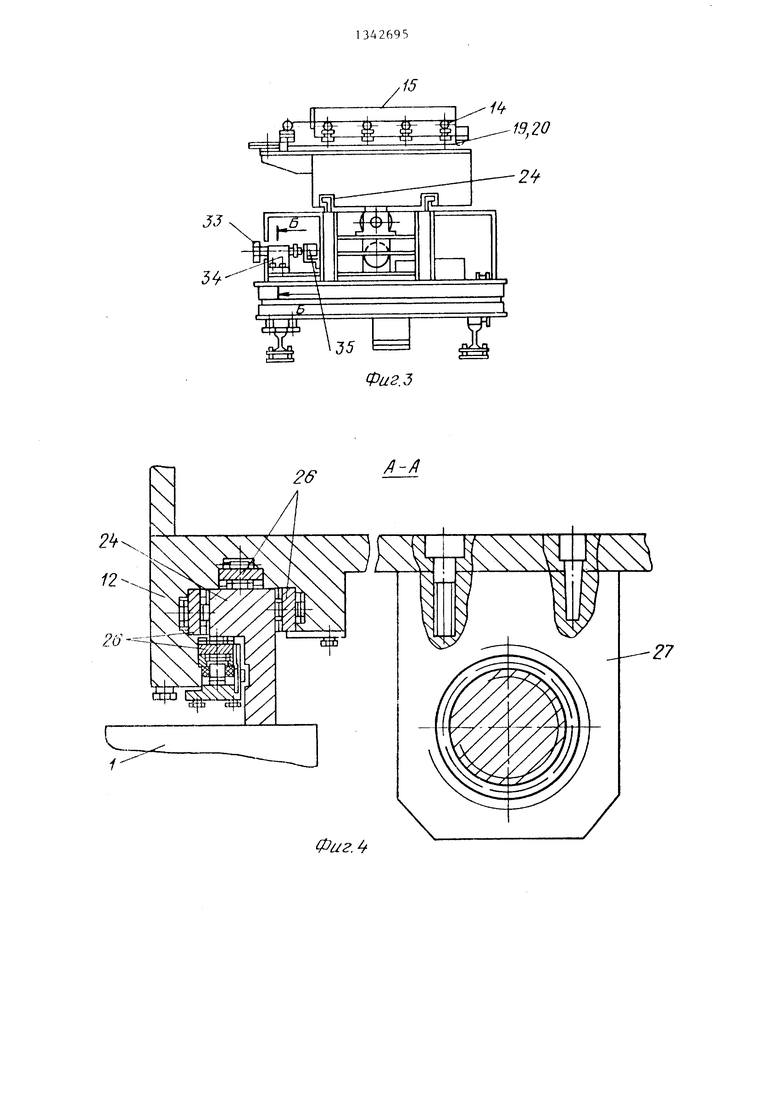
На силовой раме 1 со стороны пункта перегрузки размещен вал с зубчатым колесом 33, установленный в под- щиинике ЗА и соединенный с фотоэлектрическим круговым преобразователем 35. Чал с зубчатым колесом фиксируется с иомо1цью шарика 36, поджимаемого пружиной 37 и нробкой 38. Вал с зубчатым колесом 33 входит в зацепление с зубчатой рейкой 39 пункта перегрузки.
Автоматическая транспортная тележка работает следующим образом. Подходя на большой скорости но рельсовому пути 25 к пункту перегрузки, например к станку, но команде от бесконтактных конечных выключателей
у тележки происходят отключение электродвигателя 10 и включение электромагнитных тормозных башмаков 5, которые растягивают пружины 6 и прилипают к рельсам. Тележка резко теряет
скорость вследствие большой силы трения тормозных башмаков о рельсы и, продолжая останавливаться, заходит валом с зубчатым колесом 33 в эадеп- с зубчатой рейкой 39, расположенной на приемной части пункта перегрузки .
При движении колеса но зубчатой ройке круговой фотоэлектрический преобразователь 35 выдает электрические
сигналы в ЭВМ. При недобеге или перебеге тележкой точки позидионирования происходит сравнение в ЭВМ числа импульсов сигналов, получанных от кругового фотоэлектрического преобразователя 35 на валу с зубчатым колесом 33 и заданного в памяти ЭВМ эталонного числа импульсов, необходимого для точного останова.
Находится разнида импульсов, что
соответствует смещению X подвижной платформы те. гежки относительно приемной части перегрузки.
По команде ЭВМ включается электродвигатель 31 и через зубчатоременную
передачу 30 вращает ходовой винт 28, который через маточную гайку 27 производит перемещение подвижной плат- Формы 12. Ходовой винт связан с фотоэлектрическим круговым нреобразовате: 13
лем 32, который посылает сигналы в ЭЧМ о числе оборотов винта. По достижении необходимого числа сигналов, соответствующих коррекции смещения X, происходит отключение электродвигателя 31, а подвижная платформа 12 устанавливается в точку позиционирования относительно приемной части пункта перегрузки.
Затем по команде включается привод цепного механизма подачи спутника. Электродвигатель 21 через муфту 22, червячньш редуктор 23 и звездочку 17 приводит в движение цепь 18, на которой закреплен специальный палец 19, взаимодействующий с захватом 20 на спутнике I5. Производится подача спутника с заготовками по роликам 14 к пункту перегрузки (на приемную часть станка).
После этого происходит отключение электромагнитных башмаков 5, и тележка по команде ЭВМ перемещается к месту приема очередного спутника. Во время движения тележки от станка к станку подвижная платформа 12 приводится по команде ЭВМ в по- ложение, соответствующее нулю коррекции.
695
Формула изобретения
Автоматическая транспортная тележка, содержащая силовую раму с колесами, установленную на рельсовом пути, расположенную на силовой раме платформу с направляющими планками для установки спутника, блок электроавтоматики, привод перемещения тележки и привод передачи спутника на позицию перегрузки, отличающаяся тем, что, с целью увеличения быстродействия и повьппения точности позиционирования, привод перемещения платформы выполнен в виде винтовой передачи с ходовым винтом, а силовая рама снабжена валом с зубчатым колесом кинематически связанным с первым фотоэлектрическим круговым преобразователем, который электрически связан через блок электроавтоматики с вторым фотоэлектрическим круговым преобразователем, причем последний кинематически связан с ходовым винтом привода перемещения платформы, которая установлена с возможностью перемещения относительно силовой рамы параллельно рельсовому пути, при этом позиция перегрузки снабжена зубчатой рейкой, установленной с возможностью взаимодействия с зубчатым колесом вала.
Фиг.д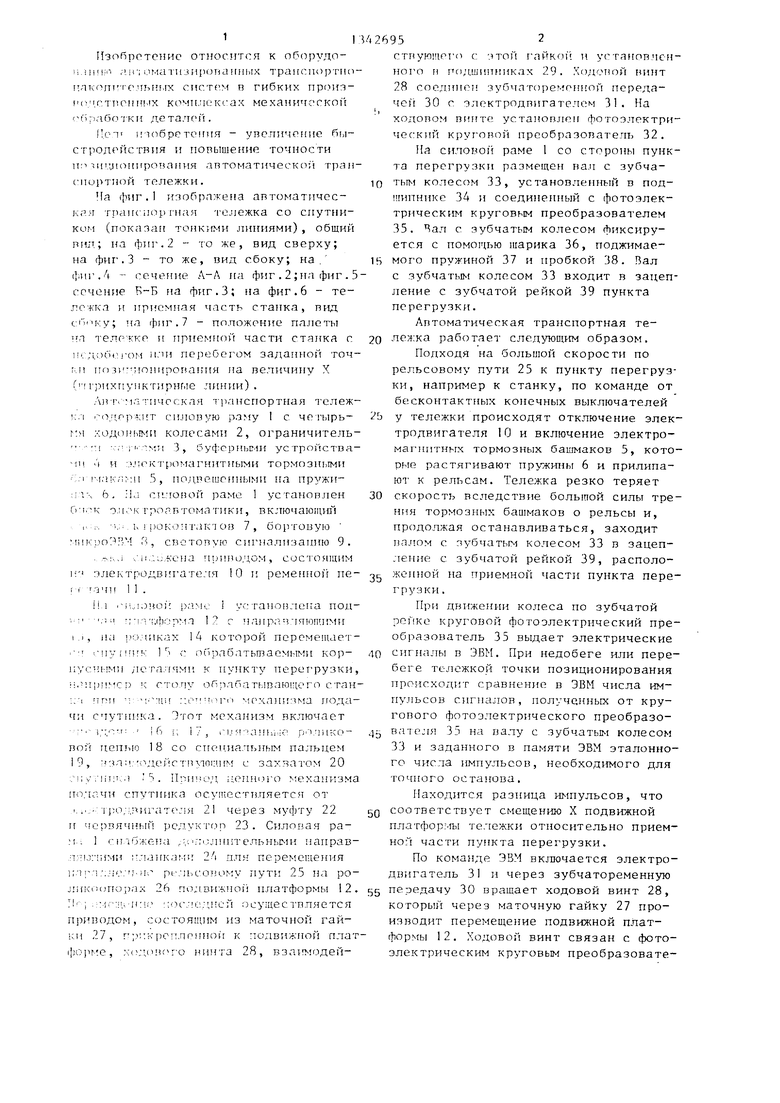
| название | год | авторы | номер документа |
|---|---|---|---|
| Фрезерный станок | 1984 |
|
SU1225707A1 |
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Транспортное средство для перегрузки грузов | 1986 |
|
SU1437322A1 |
| КОМПЛЕКС ТРАНСПОРТИРОВКИ И АДРЕСНОЙ ДОСТАВКИ БЕТОНА | 2014 |
|
RU2587767C1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
Изобретение относится к оборудованию автоматизированных транспортно- накопительных систем в гибких производственных комплексах механической обработки деталей. Целью изобретения является увеличение быстродействия и повьшение точности позиционирования автоматической транспортной тележки. Для этого силовая рама тележки снабжена подвижной платформой 12, перемещающейся параллельно траектории движения тележки. Привод платформы имеет фотоэлектрический круговой преобразователь, который посредством блока электроавтоматики взаимосвязан с фотоэлектрическим круговым преобразователем вала с зубчатым колесом 33, предназначенным для взаимодействия с зубчатой рейкой, установленной на позиции перегрузки параллельно траектории движения тележки. Число импульсов, поступившее с фотоэлектрического кругового преобразователя вала с зубчатым колесом в блок электроавтоматики, сравнивается с эталонным, необходимым для точного позиционирования, после чего по команде блока электроавтоматики привод перемещения платформы устраняет полученную ошибку. 7 ил. 12 $ (Л со 4 1чЭ О5 со ел Й/г. N П TS 22 25
А-А
Фиг.
5-5
39
33
Фиг 5
lYTJTYrfi Y rfrY
Луннт перегрузка
Фиг.&
Фиг.7
| Белянин П.Н | |||
| Гибкие производственные комплексы | |||
| М;:Машиностроение, 1984, с,219. |
