кулачкам 3 и 11, которые взаимодействуют соответственно с подъемно-поворотным валом 2 и толкателем 10. На валу 2 выполнен криволинейный паз 5, в котором размещен палец 4, что обеспечивает при осевом перемещении вала
10
1
Изобретение относится к мащино- троению и может быть использовано манипуляторах для автоматизации роизводственных процессов.
Цель изобретения - расширение ункциональных возможностей за счет величения числа степеней подвижноси.
На чертеже показана кинематичесая схема предлагаемого манипулятоа.
Манипулятор содержит корпус 1 ,в напавляющих которого смонтирован выполненный в виде трубы подъемно-поворотный вал 2,опирающийся нижним концом на кула- чок 3. На верхнем конце вала закреплен кронштейн с механической рукой, закрепленный на корпусе палец 4 расположен внутри паза 5, выполненного в боковой стенке вала 2. На кронштей-20 не этого вала смонтированы ролики 6, в которых размещены рамки механической руки 7, которая посредством гиб- ких элементов 8 и 9 связана с толкателем 10, расположенным в отверстии вала 2, Толкатель 10 опирается на ку- (лачок 11, закрепленный вместе с кулачком 3 на общем валу их привода, состоящего из двигателя 12 и криво- шипно-щатунного механизма, кривощип 13 которого кинематически связан с двигателем, а шатун 14 - с зубчатым колесом 15. Это колесо, ось вращения которого закреплена .а корпусе, находится в зацеплении с другим зубчатым колесом 16, жестко связанным с валом кулачков.
Манипулятор работает следующим образом.
В исходном положении рука 7 вьщ- винута в крайнее левое положение, вал 2 находится в крайнем положении.
ВНИИПИ Заказ 4586/15
Произв.-полигр. пр-тне, г.
25
30
35
40
его поворот. В верхней части вала в направляющих роликах 6 размещена механическая рука 7, перемещение которой осуществляется от гибких элементов 8 и 9, концы которых закреплены на толкателе 10. 1 ил.
0
0
.
5
0
5
0
При включении двигателя 12 кулачки 3 и 11 поворачиваются по часовой стрелке. В зависимости от профиля паза 5 и кулачков 3 и 11 реализуются требуемая траектория перемещения механической руки 7 с изделием и возврат ее в исходное положение. Останов двигателя 12 производится по команде от датчика.
Формула.изобретения
Манипулятор, содержащий смонтированный в корпусе подъемно-поворотный вал с механической рукой и реверсивный привод вала, поворотным выходным элементом которого является кулачок, отличающийся тем,, что, с целью расширения функциональ-- ных возможностей за счет увеличения числа степеней подвижности,он снабжен толкателем, привод снабжен вторым кулачком, а на корпусе закреплен дополнительно введенный палец, при этом подъемно-поворотный вал выполнен с криволинейным пазом на его стенке, а толкатель и рабочая часть указанного пальца размещены соответственно в отверстии и в криволинейном пазу подъемно-поворотного вала, причем второй кулачок привода жестко связан с первым и они установлены с возможностью взаимодействия соответственно первого кулачка с торцом подъемно-поворотного вала, а второго кулачка - с торцом толкателя, при этом механическая, рука установлена подвижной относительно указанного вала в направлении, перпендикулярном его оси, и связана с толкателем двумя дополнительно введенными гибкими элементами.
Тираж 95 J Под nji с н о «т
Ужгород, ул. Проектная, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Минипулятор | 1990 |
|
SU1743849A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| МАНИПУЛЯТОР | 1995 |
|
RU2093346C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Устройство для отбора проб жидкости | 1990 |
|
SU1793304A1 |
Изобретение относится к области машиностроения и может быть исппльчо- вано в манипуляторах для автомати:-;. ции производственных процессов. Цель изобретения - расширение функциональных возможностей за счет увеличения числа степеней подвижности. При включении двигателя 12 через кривошипно- шатунный механизм 13 и 14 и зубчг.тую передачу 15,16 вращение передается (Л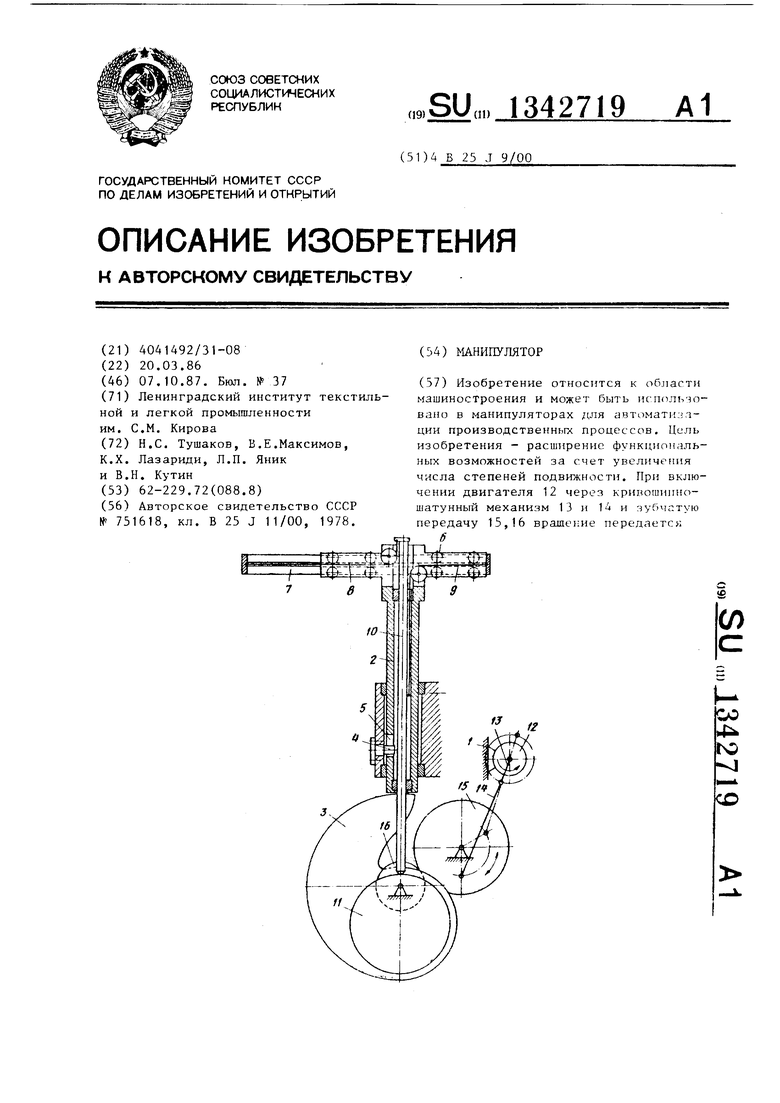
| Манипулятор | 1978 |
|
SU751618A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
