О
Os
о ю
i01
со
Изобретение относится к машиностроению, а именно к загрузочным устройствам робототехнологических комплексов холодной листовой штамповки (РТК ХОШ).
Целью изобретения является расширение функциональных возможностей за счет обеспечения дополнительных степеней подвижности.
На фиг.1 показана кинематическая схема манипулятора; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг,1; на фиг.4 - состав комплекса с использованием манипулятора.
Манипулятор состоит из основания 1, поворотного 2 и подъемного 3 корпусов, механической руки 4 и привода перемещения механической руки. Последний выполнен в виде двигателя 5, установленного в полости основания 1, механизмов поворота, подъема и линейного перемещения механической руки, и двух сцепленных между собой дополнительных зубчатых колес 6 и 7, размещенных в поворотном корпусе 2, причем на каждом из дополнительных зубчатых колес 6 и 7 установлено по два пальца 8 и 9, 10 и 11, а дополнительное колесо 6 установлено на валу 12 и связано с выходным валом двигателя 5 посредством зубчатой передачи с ведущим 13 и ведомым 14 зубчатыми колесами, имеющими передаточное отношение равное двум.
Механизм поворота размещен в основании 1 и выполнен в виде двух сцепленных между собой основных зубчатых колес 15 и 16с установленными на них пальцами 17 и 18 и диска 19 с двумя радиальными пазами 20 и 21, закрепленного на полом валу 22, жестко связанном с поворотным корпусом 2.
Механизм подъема состоит из диска 23 с двумя радиальными пазами 24 и 25, закрепленного на валу 26, конической передачи, ведущее зубчатое колесо 27 которой установлено на валу 26, а ведомое зубчатое колесо 28 закреплено на валу 29, а также кулачкового механизма, кулачок 30 которого смонтирован на валу 29, а ролик 31 жестко связан с подъемным корпусом 3, установленным на направляющих 32, смонтированных на поворотном корпусе 2.
Механизм линейного перемещения состоит из диска 33 с двумя радиальными пазами 34 и 35, установленными в подъемном корпусе 3 конической и зубчато-реечной передачами, причем рейка зубчато-реечной передачи смонтирована на механической руке 4, а зубчатое колесо 36 этой передачи установлено на одном валу 37 с ведомым
зубчатым колесом 33 конической передачи, при этом ведущее зубчатое колесо 39 конической передачи установлено на телескопическом валу 40,
Манипулятор используется в работе робототехнологического комплекса холодной листовой штамповки (РТК ХЛШ), который включает кривошипный пресс 41, загрузочное устройство 42 и сам манипулятор 43. На
0 прессе 41 установлен штамп 44 с направляющими колонками 45. РТК выполняет операции холодной листовой штамповки, не требующие удаления заготовки из зоны штампа манипулятором после срабатыва5 ния пресса. В частности заготовка может проваливаться через штамп 44 в накопитель.
Работа манипулятора в данном РТК проходит следующим образом.
0 Из положения, указанного на фиг.4, происходит выдвижение и одновременное опускание механической руки 4. захват заготовки 46 электромагнитным захватом 47, втягивание и подъем механической руки 4 с
5 заготовкой 46, поворот к прессу 41, выдвижение и опускание механической руки 4, выгрузка заготовки 46 в штамп 44, втягивание и подъем механической руки 4 и поворот в исходное положение. Необходимая по0 следовательность работы электромагнитного захвата обеспечивается путевыми выключателями. Каждое из перемещений механической руки обеспечивается следующим образом.
5 Вращение от двигателя 5 (фиг. 1) передается основными зубчатыми колесами 15 и 16, при этом палец 18, установленный на основном зубчатом колесе 16, входит в радиальный паз 21 диска 19. поворачивая поQ следний и поворотный корпус 2, а вместе с ним и механическую руку 4, размещенную в подъемном корпусе 3, установленном на направляющих 32, жестко закрепленных н-а поворотном корпусе 2. Через зубчатую пару
5 13 и 14 вращение передается дополнительным зубчатым колесам 6 и 7. Закрепленные на этих колесах 6 и 7 пальцы 8-11 расположены с учетом того, что при повороте поворотного корпуса 2 ось дополнительного
Q зубчатого колеса 7 является подвижной, при этом происходит совмещение движений передаваемого этим колесам 6 и 7 от двигателя 5 и возникающего при обкатке зубчатого колеса 7 по колесу 6.
В момент, когда вращение поворотного корпуса 2 завершено, пальцы 8 и 9 входят в пазы 24 и 35 дисков 23 и 33 соответственно. От диска 23 через коническую зубчатую передачу движение передается кулачку 30, вращаясь, кулачок 30 через ролик 31 опуска5
ет подъемный корпус 3, а вместе с ним и механическую руку 4.
От диска 33 через телескопический вал 40, коническую передачу и зубчатое колесо 36 вращательное движение преобразуется в поступательное движение механической руки 4. Затем пальцы 10 и 9 входят в радиальные пазы 25 и 34 дисков 23 и 33, поворачивая их в обратную сторону. Соответственно происходят подъем и втягивание механической руки 4,
Передаточное число зубчатой пары 13 и 14 равно двум, т.е. если основные зубчатые колеса 15 и 16 сделают половину оборота, дополнительные зубчатые колеса 6 и 7 сделают полный оборот, при .этом за время вы- стоя поворотного корпуса 2 происходит движение-опускание, втягивание-подъем механической руки 4. Затем палец 17 входит в радиальный паз 20 диска 19, поворачивая его в обратном направлении, после чего цикл вертикального и линейного перемещения механической руки повторяется.
Требуемый угол поворота механической руки 4, величина ее подъема и линейного перемещения, время выстоев обеспечиваются выбором углов между радиальными пазами 20 и 21, 24 и 25. 34 и 35 дисков 19, 23 и 33, а также выбором передаточных отношений зубчатых пар 13-14, 27-28, 38-39. 36-6.
Формула изобретения Манипулятор, содержащий основание, поворотный корпус, механическую руку и привод ее перемещения, включающий двигатель с механизмом поворота, выполненным в виде диска с двумя радиальными
пазами, закрепленного на валу, жестко связанном с поворотным корпусом, и двух сцепленных между собой основных зубчатых колес, снабженных пальцами, установленными с возможностью поочередного взаимодействия с радиальными пазами диска механизма поворота, отличающий- с я тем, что, с целью расширения функциональных возможностей за счет обеспечения
механической руке дополнительных степеней подвижности, он снабжен направляющими, закрепленными на поворотном корпусе, подъемным корпусом, установленным на направляющих, механизмами подьема и линейного перемещения, двумя сцепленными между собой дополнительными зубчатыми колесами, одно из которых кинематически связано с двигателем, и на каждом из этих колес установлено по два
пальца, причем механизм подъема выполнен в виде диска с двумя радиальными пазами, конической передачи и кулачкового механизма, кулачок которого связан с диском посредством конической передачи, а
его ролик жестко связан с подъемным корпусом, при этом механизм линейного перемещения выполнен в виде диска с двумя радиальными пазами, конической зубчато- реечной передачи, рейка последней из этих
передач смонтирована на механической руке, а зубчатое колесо этой передачи связано с диском посредством конической передачи, кроме этого, пальцы дополнительных зубчатых колес установлены с возможностью поочередного взаим одействия с соответствующими радиальными пазами дисков механизмов подъема и линейного перемещения.
2Ы
15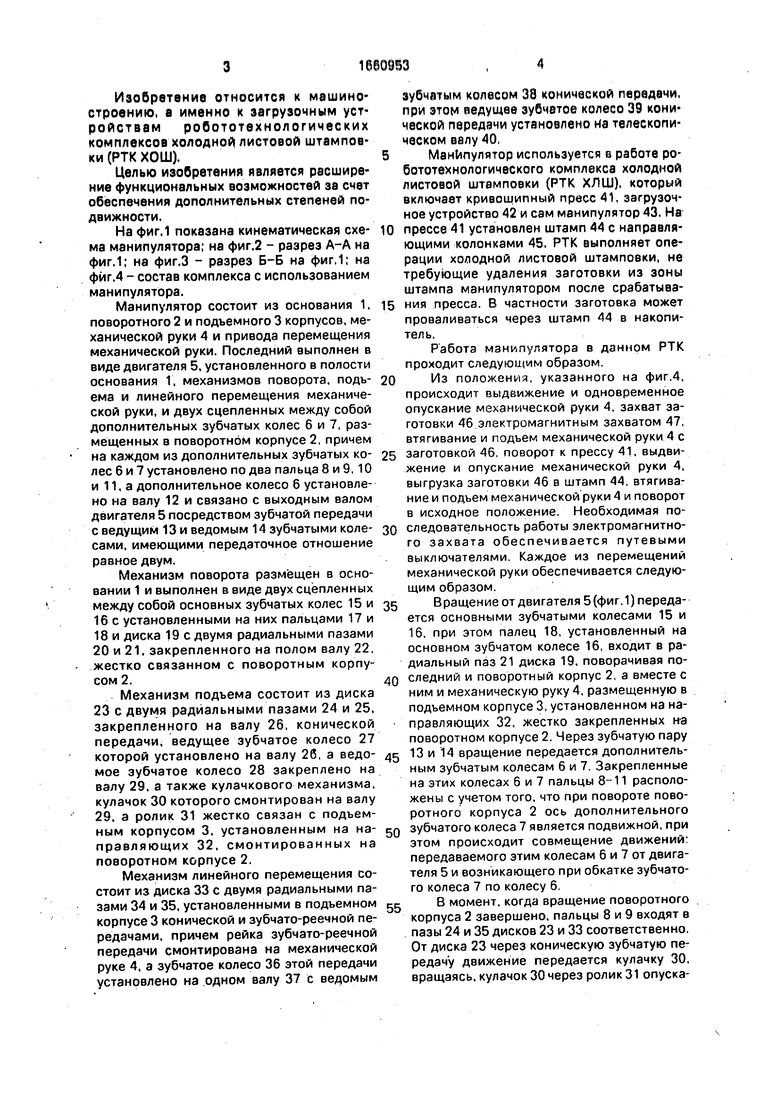
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| МЕХАНИЗМ УСТАНОВКИ И УДЕРЖАНИЯ КРЫШКИ КОНТЕЙНЕРА (ПЕНАЛА) С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ | 2011 |
|
RU2456691C1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Манипулятор | 1980 |
|
SU918083A2 |
| Манипулятор | 1989 |
|
SU1646843A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |


Изобретение относится к машиностроению, а именно к загрузочным устройствам робототехнологических комплексов холодной листовой штамповки. Целью изобретения является расширение функциональных возможностей за счет обеспечения дополнительных степеней подвижности. Манипулятор состоит из основания 1, механической руки 4 с приводом ее перемещения, обеспечивающим поворот, подъем и линейное перемещение. Привод перемещения включает двигатель 5, выходной вал которого кинематически связан как с двумя сцепленными между собой дополнительными зубчатыми колесами 6 и 7, передающими движение механизмам подъема и линейного перемещения механической руки, так и с двумя сцепленными между собой основными зубчатыми колесами 15 и 16 механизма поворота. Механизмы поворота, подъема и линейного перемещения включают диски 19, 23 и 33, в каждом из которых выполнено по два радиальных паза, с которыми поочередно взаимодействуют пальцы 17, 18, 8, 9, 10 и 11 основных 15 и 16 и дополнительных 6 и 7 зубчатых колес. Диск 19 механизма поворота установлен на полом валу 22, жестко связанном с поворотным корпусом 2, а диск 23 механизма подъема посредством конической передачи - с кулачком 30 кулачкового механизма, ролик 31 которого жестко связан с подъемным корпусом 3. Диск 33 кинематически связан с рукой 4. 4 ил.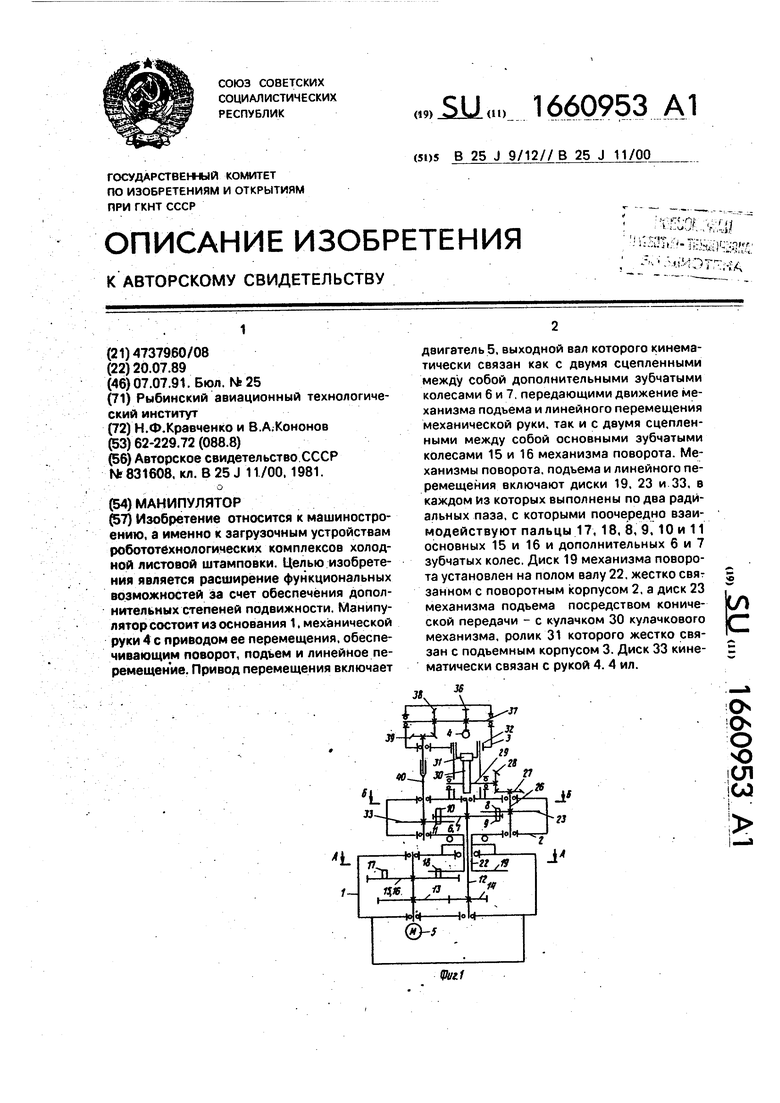
12
Фиг.З
ILLJj i
1 Гч
II
M
LJ
а
i
Гч
its
#
Фиг А
| Манипулятор | 1979 |
|
SU831608A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| о | |||
