Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в устройствах с гибкими звеньями, обеспечивающими прямолинейное перемещение призматического тела.
Цель изобретения - упрощение конструкции и обеспечение надежности путем устранения возможности перекосов при возвратно-поступательных перемещениях призматического тела.
На фиг. 1 изображено направляющее устройство, общий вид; на фиг. 2 - его развертка по боковым граням призмы.
Направляющее устройство содержит неподвижные верхнее 1 и нижнее 2 основания, смонтированные на последних и лежащие в гранях, построенной на основаниях 1 и 2 призмы 3, ролики. На грани 4 закреплены ролики 5 и 6, на грани 7-8 и 9, на грани 10-II и 12, на грани 13-14 и 15 соответственно. Ролики охвачены гибкими звеньями 16-19, концы которых закреплены на призматическом теле 20 по схеме, приведенной на развертке фиг. 2. Конец гибкого звена 16 в точке 21 огибает ролик 5 нижнего основания 2 и ролик 6 верхнего основания 1, а другой конец 22 закреплен на призматическом теле 20 со стороны верхнего основания 1. Гибкие звенья 17, 18, 19 образуют на развертке периодическую и замкнутую по периметру верхнего основания 1 последовательность.
0
5
5
0
Устройство работает следующим образом.
При перемещении призматического тела 20 звенья 16-19, перекатываясь по роликам. 5, 6 и 9, 8, 9 и 12, 11, 12 и 15, а также 14, 15 и 6 соответственно, укорачивают один из своих концов на величину удлинения другого, вследствие чего призматическое тело 20 перемещается прямолинейно без перекосов.
Вращающиеся ролики могут быть заменены на неподвижные оси, трение гибкого звена о которые может быть уменьшено путем применения антифрикционных покрытий.
Формула изобретения Направляющее устройство для прямолинейного перемещения призматического тела, содержащее основания с неподвижно закрепленными на них роликами, охваченными гибкими тягами, параллельными друг другу и имеющими неподвижно закрепленные концы, отличающееся тем, что, с целью упрощения конструкции и обеспечения надежности путем устранения возможности перекосов при возвратно-поступательных перемещениях призматического тела, концы смежных тяг закреплены встречно друг другу на ребрах призматического тела, а каждая из тяг за- пасована на двух роликах, расположенных диагонально в плоскости, параллельной соответствующей одной из граней призматического тела.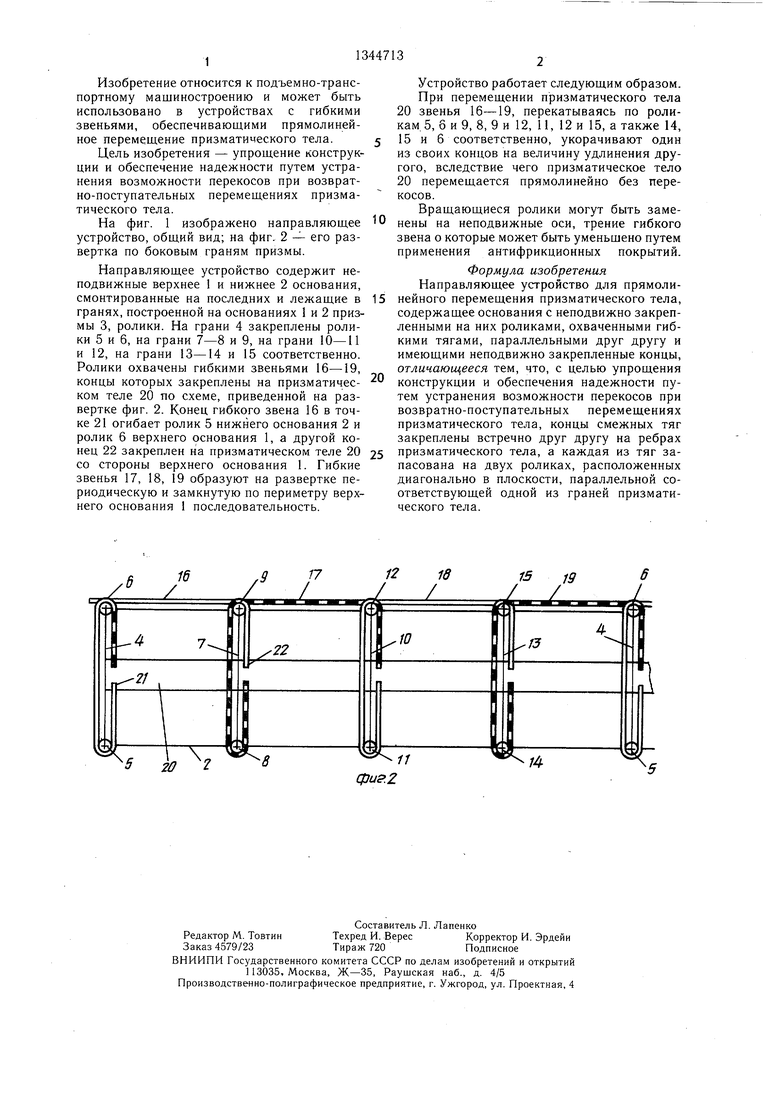
| название | год | авторы | номер документа |
|---|---|---|---|
| Направляющее устройство И.Л.Казанцева для прямолинейного перемещения призматического тела | 1985 |
|
SU1341140A1 |
| Манипулятор | 1986 |
|
SU1399111A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ДВУМЯ РАСПОЛОЖЕННЫМИ НА ОДНОМ УРОВНЕ ТОЧКАМИ, ПРЕИМУЩЕСТВЕННО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДКРАНОВЫХ ПУТЕЙ МОСТОВЫХ КРАНОВ | 1996 |
|
RU2112918C1 |
| Выключатель высокого напряжения | 1983 |
|
SU1117726A1 |
| Трубогибочный станок | 1974 |
|
SU521966A1 |
| Устройство для обработки плоских поверхностей оптических деталей | 1989 |
|
SU1645107A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к направляющим устройствам для прямолинейного перемещения призматического тела. Цель изобретения - упрощение конструкции и обеспечение надежности путем устранения возможности перекосов при воз19 18 1 J / / / 73/ вратно-поступательиых перемещениях призматического тела. Устройство содержит неподвижные основания 1 и 2 и подвижное призматическое тело 20. На призме 3 смонтированы ролики 5, 6, 8, 9, 11, 12, 14, 15, охватывающие их гибкие звенья 16, 17, 18, 19, противоположные концы которых закреплены на призматическом теле 20. Ролики размещены в боковых гранях призмы, в развертке которой звенья образуют периодическую последовательность с идентичной ориентацией концов гибких связей. При перемещении призматического тела 20 звенья 16- 19, перекатываясь по роликам, укорачивают один из своих концов на величину удлинения другого, вследствие чего движение осуществляется прямолинейно, без перекосов. 2 ил. % (Л со со фие.1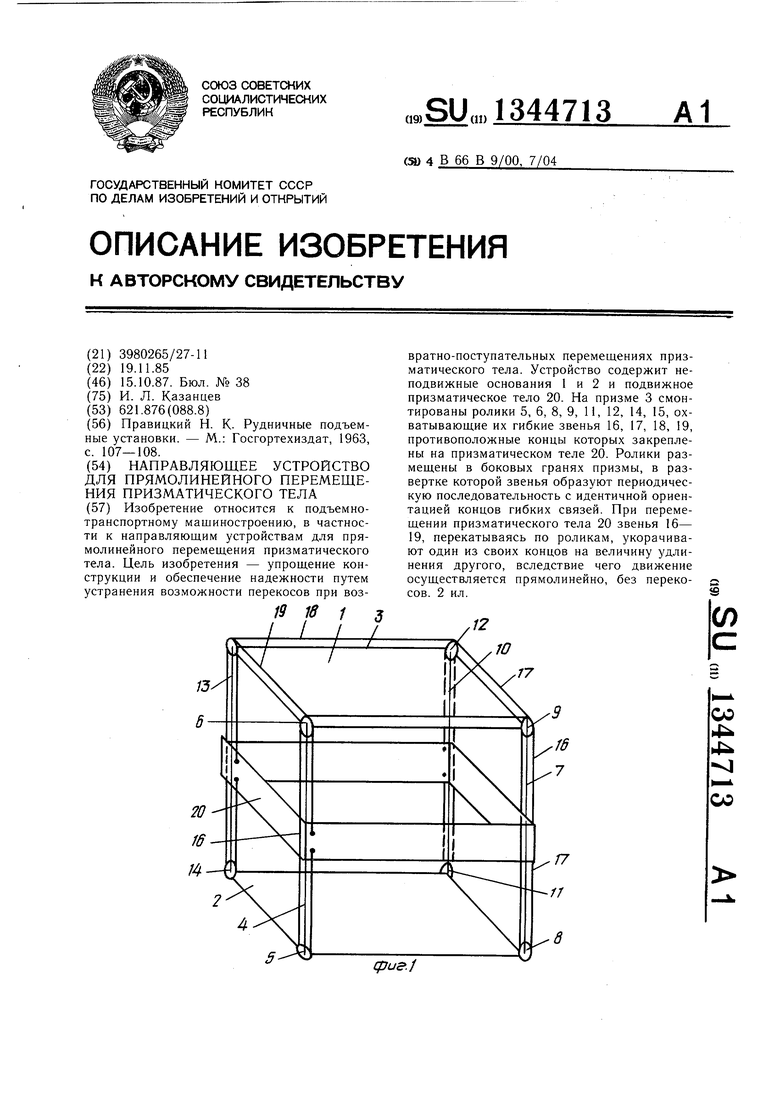
5 20 2
фир.2
| Правицкий Н | |||
| К | |||
| Рудничные подъемные установки | |||
| - М.: Госгортехиздат, 1963, с | |||
| Счетный сектор | 1919 |
|
SU107A1 |
