1°
Изобретение относится к машиностроению, и может быть использовано при автоматизации сборочных процессов, в частности при сборке электро соединителей.
Цель изобретения - повьппение производительности, надежности и упрощение конструкции.
На фиг. изображена автоматиче- екая линия, общий вид , на фиг . 2 - механизмы подъема и опускания спутников на фиг. 3 - вид А на фиг. 2;
4- сечение Б-Б на фиг, 2;
5- устройство фиксации спу на фиг. 6 - вид В на фиг. 5,
7-10- положения элементов останова в процессе их.
на фиг на фиг
НИКОВ {
на фиг механизмов работы. . .
Автоматическая сборочная линия спутникового типа содержит установленные согласно техническому процессу вдоль транспортного устройства 1 полуавтомат 2 установки корпуса электросоединителя, полуавтомат установки нижнего изолятора (не показан полуавтомат 3 набора контактов, полуавтомат 4 установки верхнего изолятора, полуавтомат 5 установки стопорного кольца, полуавтомат 6 съема готовых изделий, а также общий д.пе ктронный блок управления (не показа и устройства подъема 7 и опускания 8 спутников, установленные в начале и конце линии соответственно.
Полуавтомат- 2 установки корпуса электросоединителя содержит установленные на станине 9 сборочную головку 10 и контрольное устройство 1 Полуавтоматы 3-5 содержат аналогичные устройства, В конце линии установлено приемное устройства 12 готовых изделий о Сборочная головка 10, например, полуавтомата 2 вктючает вибробункер, накопитель, ориентатор (не показаны) и робот-манштулятор с толкателем Г.
Транспортное устройство выполнен в виде наклонньпс направляющих, образующих рабочую ветвь 3, предназначенную для перемещения спутников 1 4 с изделиями между рабочими и контрольными позициями, и холостую ветв 15, предназначенную для возврата спутников на исходную позицию после съема с них изделий.
Направляющие прямой и возвратной ветвей транспортного устройства свя
O
5
0
5
0
5
0
5
0
5,
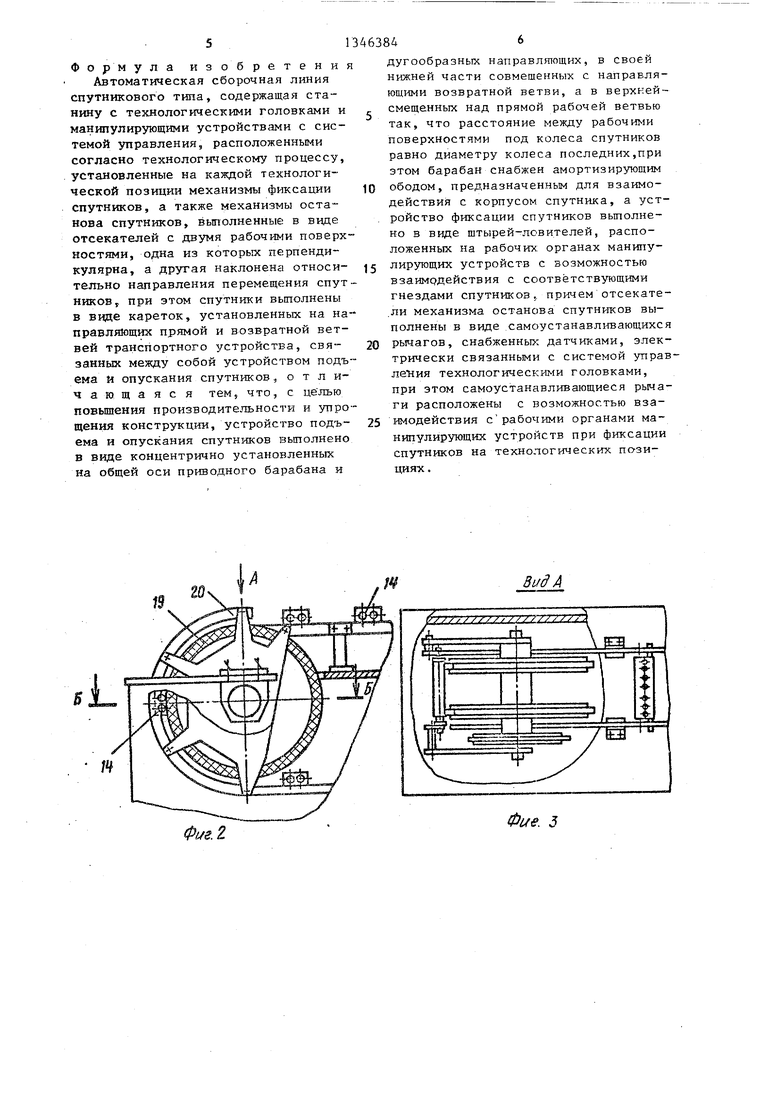
заны межд,у собой устройствами подъема и опускания спутников 7 и 8. Устройство подъема и опускания спутников состоит из концентрично установленных на общей оси 16, закрепленной в корпусе 17, приводного барабана 18 (привод не показан), снабженного амортизирующим ободом 19, и дугообразных направляющих 20, закрепленных на оси 16, дугообразные направляк: -- щие 20 состыкованы с направляющими возвратной ветви транспортного устройства 1 и размев1ены над направляиз- щрп-ш рабочей ветви, так что зазор между ними равен диа1-1етру колеса спутника.
Амортизирующий обод выполнен из амортизирующего материала с большим коэффициентом трения, например пористой резины.
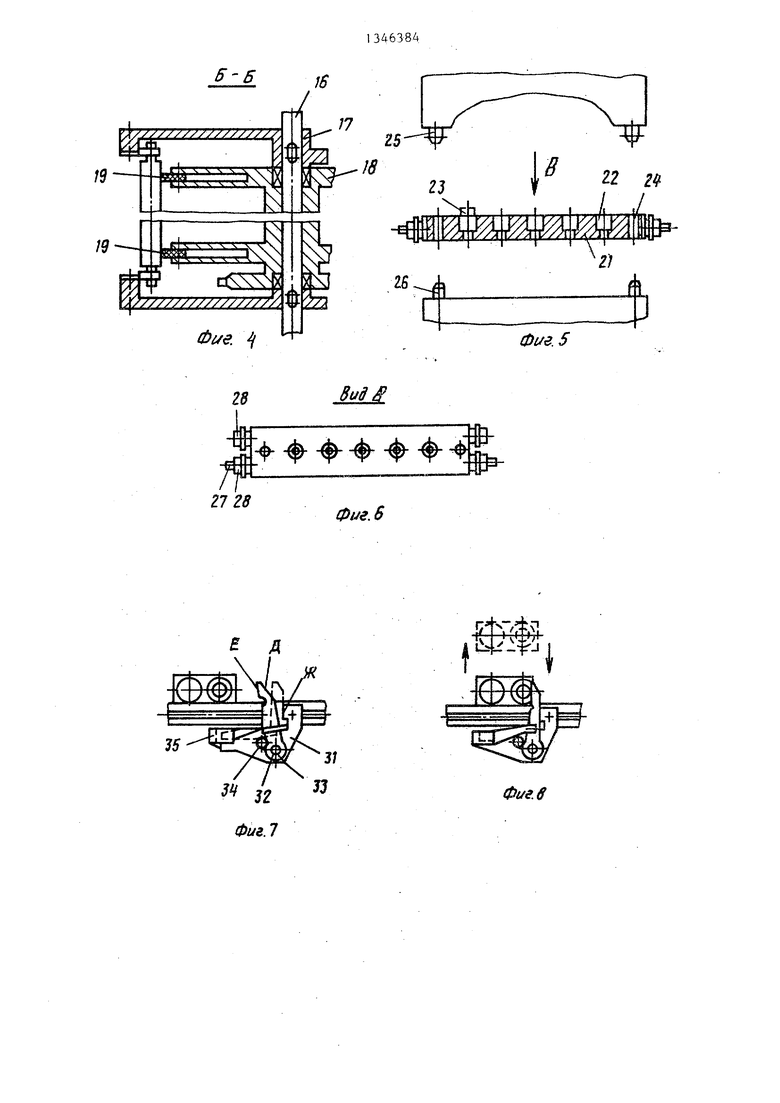
Спутник 14 содержит корпус 2 с установочными гнездами 22 для собираемых изделий 23 и фи-ксирующими гнездами 24, предназначенными для фиксации спутников на технических позициях фиксирующими штырями-ловителями 25 и 26 соответствующих технологических головок. Оси 27 двух передних колес 28 спутнщса 14 выполнены длиннее задних для обеспечения, возможности взаимодействия с механиз мами 29 и 30 останова спутншсов, установленными на рабочей ветви транспортного устройства, 1 .Механизмы 29 и 30 останова закреплены на рабочей ветви транспортного устройства 1 . При необходимости произвести технологическую операции в спутнике на рабочей ветви служит механизм 30 останова, а при вьтолкенин технологической операции над рабочей ветвью - механизм 29 останова. Механизмы 29 останова спутников 5 содержат кронштейны 31, закрепленные на направляющих прямой ветви транспортного устройства На кронштейнах 3 установлены с возможностью поворота на неподвижных осях 32 рычаги 33, взаимодействующие с осями 27 двух передних колес 28 спутнш-сов. неподвижные упоры 34, взаимодействующие с рычагами 33, и датчики 35, электрически связанные с соответств тощими технологическими головками. Рьгчаги 33 механизма останова имеют две рабочие поверхности, одна и:ч которых Л выполнена наклонно относитет но направления перемещения спутника, а другая
Е перпендикулярно ему. Кронштейны 31 имеют упорную поверхность Ж, взаимодействующую с рьиагами 33 .
Механизмы 30 останова спутников содержат кронштейны 36, закрепленные на направляющих прямой ветв-и транспортного устройства 1. На кронштейнах 36 установлены с возможностью поворота на неподвижных осях 37 подпружиненные рычаги 38, шарнир- но закрепленные осями 32 с рычагами 33, взаимодействующими с осями 27 двух передних колес спутника 14, неподвижные упоры 34, взаимодействующие с рычагами 33, и датчики 35, электрически связанные с. технологиче- скими головками. Рычаги 33 механизма |30 останова спутников имеют, как и рычаги 33 механизма 20 останова, две рабочие поверхности, одна из которых Б выполнена наклонно относительно направления перемещения спутника, а другая перпендикулярно ему. Кронщтейны 36 имеют. уЛорную поверхность Ж, взаимодействующую с рьиага- ми 33. Толкатели 39 установлены с возможностью перемещения в направляющих 40 корпуса, закрепленного на кронштейне 36.
Автоматическая сборочная линия работает следующим образом.
С холостой ветви транспортного устройства 1 спутники 14 подаются на дугообразные направляющие 20 устройства 7 подъема спутника и при вращении приводной барабан 18 амортизирующим ободом 19 прижимает их к дугообразным направляющим. Спутники 14 поднимаются за счет сцепления амортизирующего обода приводного ;барабана 18 с корпусом спутника и перекатьшаются на рабочую ветвь транспортного устройства с необходимым принудительным ускорением к механизму 30 останова и, наезжая передними осями 27 на плоскость Е рычага 33, поворачивают его до упора в плоскость Ж крепления 36 и останавливаются. После остановки спутника 14 срабатьшает датчик 35 механизма останова 30, подающий команду на технологическую головку, манипулятор которой опускает захват с корпусами электросоединителя и устанавливает их в установочные гнезда 22 спутника 14, фиксируя его при зтом своими щтырями-ловителями 25 по фиксирующим гнездам 24. При установке корпу0
са электросоед1-гнителя в спутн1те 4 захват манипулятора технологической головки толкателем Г воздействует через толкатель 39 механизма 30 останова На подпружиненный рычаг 38, который, поворачиваясь вокруг неподвижной оси 37, увлекает за собой рычаг и. 33 механ изма 30 останова. Рычаги 33 опускаются ниже осей 27 спутника/ поворачиваясь до встречи с не- подвтасньм упором 34, а поверхность Д; рьиага 33- располагается со стороны оси 27 (между осями боковых колес
5 спутника), освобождая спутник 14, и П1 и подъеме захвата .манипулятора спутник-перемещается далее по линии., получая дополнительное ускорение за счет взаимодействия наклонной поверхнести Д рьтчага 33 с осями 27 передних колес спутника. На следующей позиции спутник 14 наезжает на поверхность рычагов 33 мех.анизма 29 останова спутников, поворачивая эти ры5 чаги относительно осей 32 до упора в опорную поверхность Ж кронштейна 31 механизма 29 останова 9, при этом срабатьшает его датчик 35, подающий команду на соответствухяцую технологическую головку. При подъеме спутника 14 с транспортной ветви 1 к технологической головке ее -подъемная платформа сво-ими штырями фиксирует спутник 14 на -позиции по фиксирующим гнездам 24 спутника, отсекая поток предыдущих спутников. При этом рычаги 33 поворачиваются относительно осей 32 до стыковки с неподвижными упорами 34.
При последующем опускании платформы со спутником 14 она своими передними ос5гми 27 наезжает на наклонную поверхность Д рычагов 33, получая дополнительное ускорение для
5 перемещения на след-ующую рабочую
позицию. В конце рабочей ветви транспортного устройства спутник 14 наезжает на дугообразные направляющие 20.
В конце линии собранные изделия Moryf выгружаться из спутника либо полуавтоматом 6 съема изделий, либо собранные изделия могут выгружаться из установочных гнезд спутников при перемещении спутников по дугообразным направляющим 20. При этом собранные изделия под действием собственного веса выгружаются на приемное транспортное устройство 12..
0
5
0
0
5
Ф о р м у л а из об р е т е н и я
Автоматическая сборочная линия спутникового типа, содержащая станину с технологическими головками и манипулирующими устройствами с системой управления, расположенными согласно технологическому процессу, установленные на каждой технологической позиции механизмы фиксации спутников, а также механизмы останова спутников, выполненные в виде отсекателей с двумя рабочими поверх™ костями, одна из которых перпендикулярна, а другая наклонена относительно направления перемещения спутников , при этом спутники вьшолнены в виде кареток, установленных на направляющих прямой и возвратной ветвей транспортного устройства, связанных между собой устройством подъема и опускания спутников, о т л и- чаю. щаяся тем, что, с це лью повышения производительности и упрощения конструкции, устройство подъема и опускания спутников выполнено в виде концентрично установленных на общей оси приводного барабана и
463846
дугообразных направляггощих, в своей нижней части совмешенных с направляющими возвратной ветви, а в верхней смещенных над прямой рабочей ветвью так, что расстояние между рабочими поверхностями под колеса спутников равно диаметру колеса последних,при этом барабан снабжен амортизирующим
10 ободом, предназначенным для взаимодействия с корпусом спутника, а уст- . ройство фиксации спутников вьтолне- но в виде штырей-ловителей, расположенных на рабочю ; органах манипуи лирующих устройств с возможностью взаимрдействия с соответствующими гнездами спутников., причем отсекате- .ли механизма останова спутников выполнены в виде самоустанавливающихся
20 рычагов, снабженньк датчиками, электрически связанньми с системой управления технологическими головками, при этом самоустанавливающиеся рычаги расположены с возможностью вза25 имодействия с рабочими органами манипулирующих устройств при фиксации спутников на технологических позициях .

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная сборочная линия | 1985 |
|
SU1306691A1 |
| КОМПЛЕКС СБОРКИ ШАТУННО-ПОРШНЕВОЙ ГРУППЫ | 2013 |
|
RU2548843C2 |
| Многопозиционный автомат | 1983 |
|
SU1202778A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
| Автоматизированная линия спутникового типа | 1981 |
|
SU1020198A1 |
| Автоматизированная сборочная линия | 1982 |
|
SU1020207A1 |
| Транспортная система для несинхронных автоматических линий | 1982 |
|
SU1060420A1 |
| Многопозиционный автомат для сборки узлов | 1989 |
|
SU1660925A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1982 |
|
SU1037972A1 |

Изобретение относится к машиностроению и может быть использовано при автоматизации сборочных процессов в частнйсти при сборке электросоединителей. Целью изобретения является повышение производительности, надежности и упрощение конструкции. Это достигается тем что устройства подъема 7 и опускания 8 спутн иков выполнены, в виде концентрично установленных на общей оси приводного барабана с амортизирующим ободом и дугообразных направляющих, являющихся продолжением возвратной ветви транспортного устройства 15. Устройство фиксации спутников имеет штыри-ловители, установленные на манипулирующем устройстве, причем отсекатели механизмов 29 и 30 останова спутников 14 выполнены в виде самоустанавливающихся рычагов. 10 ил. с 9 г jsn 1 г W Фие.1
Фиё.1
3i/(
Фие. 5
11
Фие.
28
Вид
Фиг. 5
27 28
Фиг. 6
Я Д
35
Фиг. в
15
Фие. Ю
Составитель А. ОЬсуркин -Редактор А. Козориз Техред Л.Сердюкова Корректор В. Романенко
Заказ 876Тираж 892Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКИТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, у;г. Проектная, 4
| Авторское свидетельство СССР | |||
| Автоматизированная линия спутникового типа | 1981 |
|
SU1020198A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
