Изобретение относится к машиностроению, в частности к захватным головкам манипуляторов.
Цель изобретения - расширение технологических возможностей и повышение надежности захвата.
На фиг.1 дан захват промьппленно- го робота, общий вид в разрезе; на фиг,2 - вид А на фиг.1. .
Захват промышленного робота крепится на руке манипулятора 1 и содержит корпус 2, выполненный в виде стакана, эластичную тороидальную оболочку 3, закрепленную на стенке стакана держателями 4, полость 5, соединенную с пневмосистемой.
Захват работает следующим образом,,
Рукой манипулятора переносят захват к детали и накрывают ее стаканом,, При подаче сжатого воздуха в полость оболочки она деформируется и зажимает деталь. Держатели, ограничивая ход-стенок оболочки, исключают возможность их коробления. Для освобождения детали из полости оболочки стравливают воздух,
Форм-ула изобретения
Захват промышленного робота, содержащий корпус, выполненный в виде стакана, на внутренней боковой стенке которого расположена надувная эластичная оболочка, полость которой подключена к пневмосистеме, отличающийся тем, что, с целью расширения технологических возможностей и повышения надежности, эластичная оболочка выполнена тороидальной и прикреплена к стенке стакана при помощи держателей, равномерно расположенных по окружности стакана.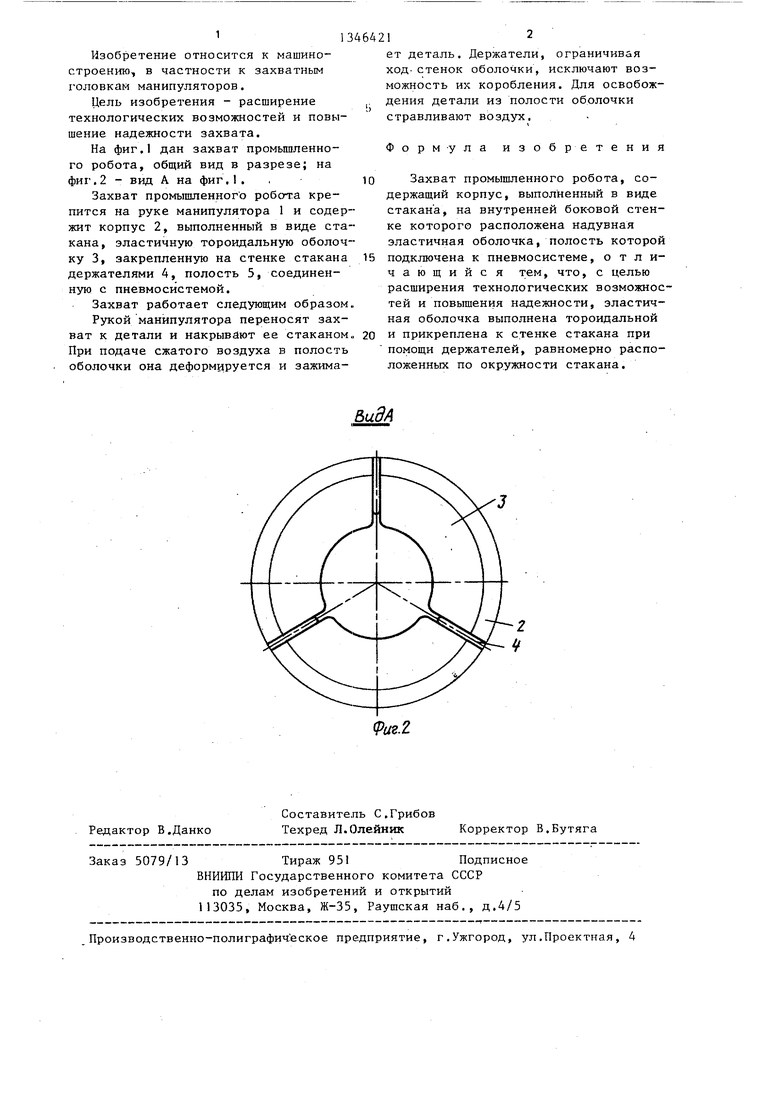
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| Захватное устройство | 1987 |
|
SU1489983A2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Схват | 1986 |
|
SU1315303A1 |
| Пневматический захват | 1986 |
|
SU1430263A1 |
Изобретение относится к машиностроению, в частности к захватным головкам манипуляторов. Целью изобретения является расширение технологических возможностей и повышение надежности захвата за счет крепления эластичной тороидальной оболочки при помощи держателей, равномерно расположенных по окружности корпуса захвата. Захват крепится к руке манипулятора 1 и соде ржит корпус 2, выполненный в виде стакана, эластичную тороидальную оболочку 3, закрепленную на стенке стакана держателями 4, полость 5, соединенную с пневмосисте- мой. 2 ил. ж I // / (Л
Редактор В.Данко
Составитель С.Грибов Техред Л.Олейник
Заказ 5079/13Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г,Ужгород, ул,Проектная, 4
Корректор В.Бутяга
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
