Изобретение относится к машиностроению, а именно к захватным устройствам роботов и манипуляторов, и является усовершенствованием изобретения по авт.св. № 1212782.
Цель изобретения - расширение технологических возможностей и повьш1е- ние надежности работы устройства.
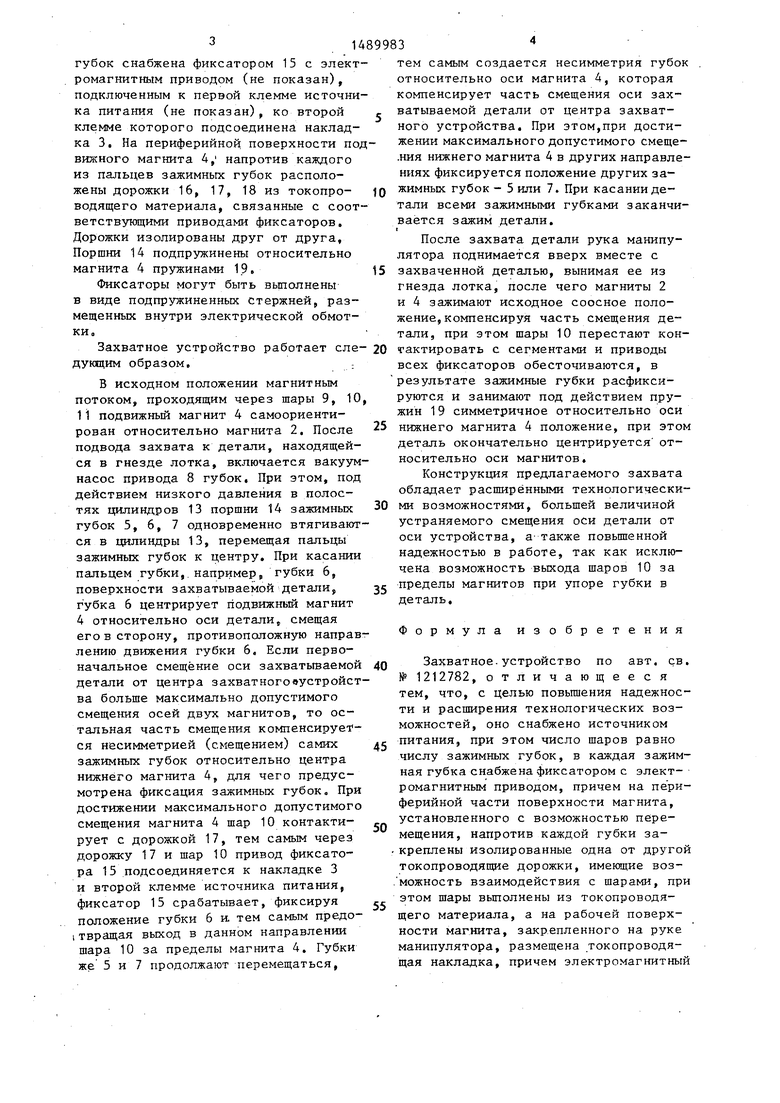
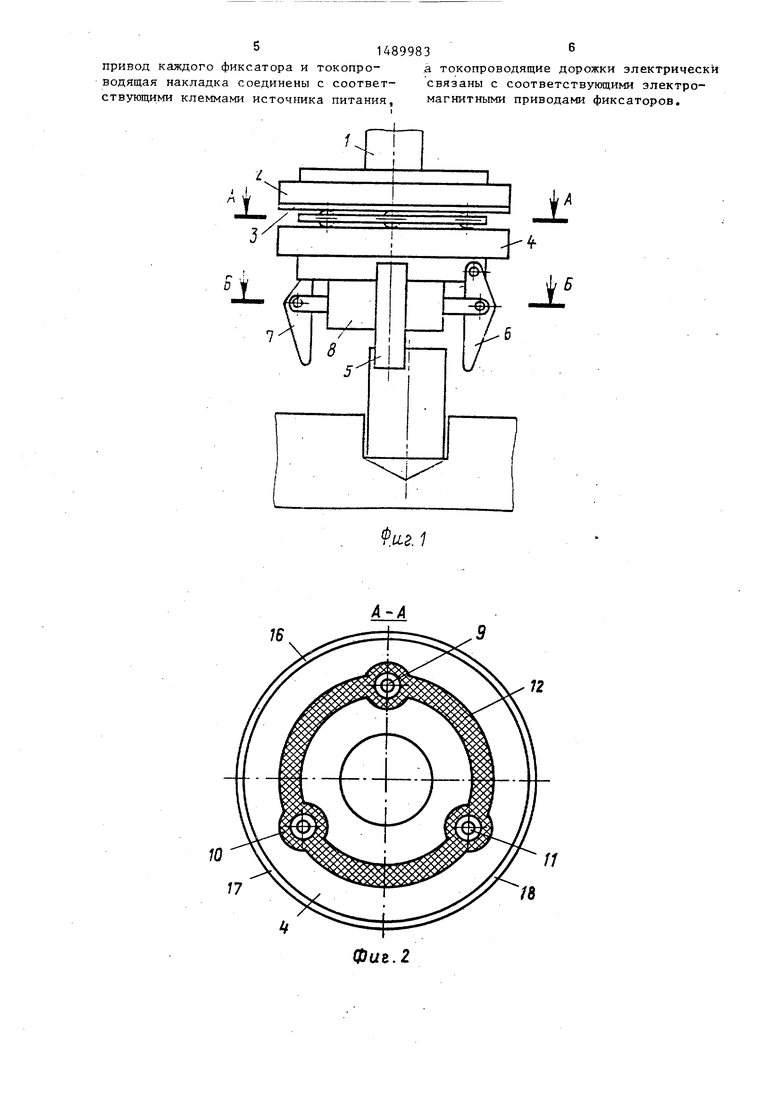
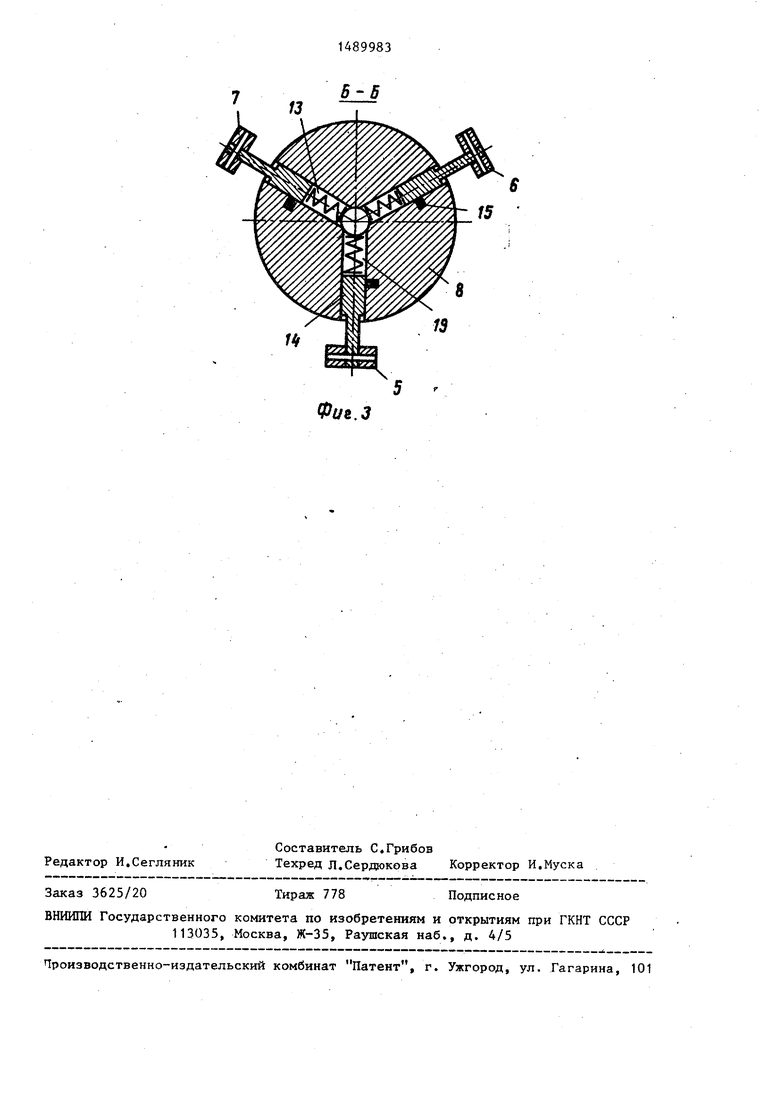
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3- ра&- рез Б-Б на фиг. 1.
Захватное устройство крепится к руке 1 манипулятора кольцевым магни том 2 с накладкой 3 из магнитно-и токопроводящего материала. Магнитными силами удерживается второй постоянный магнит 4 такой же, как и магнит 2 . На подвижном магните 4 устаноз- лены зажимные губки 5, 6, 7с приводом 8. Для обеспечения свободного перемещения магнитов 2 и 4 относительно друг друга они разделены по числу зажимных губок стальными шарами соответственно 9, 10, 11 установленными в сепараторе 12. Привод 8, например, вакуумный, содержит по числу зажимных губок полые цилиндры 13, полость которых соединена с вакуумна- сосом (не показан). В гшлиндрах 13 установлены поршни 14 с возможностью их перемещения в цилиндрах 13. Поршни 14 шарнирно соединены с пальцами зажимных губок. Каждая из защитных
4
00 У5 СО
00,
со14)
губок снабжена фиксатором 15 с электромагнитным приводом (не показан), подключенным к первой клемме источника питания (не показан), ко второй с клемме которого подсоединена накладка 3, На периферийной поверхности подвижного магнита 4, напротив каждого из пальцев зажимных губок расположены дорожки 16, 17, 18 из токопро- Ю водящего материала, связанные с соответствующими приводами фиксаторов. Дорожки изолированы друг от друга, Поршни 14 подпружинены относительно магнита 4 пружинами 19,15
Фиксаторы могут быть вьщолнены в виде подпружиненных стержней, размещенных внутри электрической обмотки.
тем самым создается несимметрия гу относительно оси магнита 4, которая компенсирует часть смещения оси зах ватываемой детали от центра захватного устройства. При этом,при дости жении максимального допустимого смещ .ния нижнего магнита 4 в других направл ниях фиксируется положение других за жимных губок - 5 или 7. При касании де тали всеми зажимными губками заканч вается зажим детали, t
После захвата детали рука манипу лятора поднимается вверх вместе с захваченной деталью, вынимая ее из гнезда лотка, после чего магниты 2 и 4 зажимают исходное соосное положение, компенсируя часть смещения де , при этом шары 10 перестают ко
тали
Захватное устройство работает еле- 20 тактировать с сегментами и приводы дукщим образом,- всех фиксаторов обесточиваются, в
тем самым создается несимметрия губок относительно оси магнита 4, которая компенсирует часть смещения оси захватываемой детали от центра захватного устройства. При этом,при достижении максимального допустимого смеще- .ния нижнего магнита 4 в других направлениях фиксируется положение других зажимных губок - 5 или 7. При касании детали всеми зажимными губками заканчивается зажим детали, t
После захвата детали рука манипулятора поднимается вверх вместе с захваченной деталью, вынимая ее из гнезда лотка, после чего магниты 2 и 4 зажимают исходное соосное положение, компенсируя часть смещения де- , при этом шары 10 перестают контали
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захватный орган манипулятора | 1977 |
|
SU721324A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
Изобретение относится к машиностроению, а именно к захватным головкам манипуляторов. Цель изобретения- повышение надежности и расширение технологических возможностей. Каждая губка 5, 6, 7 снабжена фиксатором с электромагнитным приводом, а число шаров выбирается равным числу губок. На периферийной поверхности магнита 4 напротив каждой губки расположены изолированные одна от другой токопроводящие дорожки, электрически связанные с приводом фиксаторов. При захвате несцентрированной детали одна из губок касается ее поверхности и смещает магнит 4 относительно магнита 2. Достигнув максимального смещения, один из шаров накатывается на токопроводящую дорожку и замыкает электрическую цепь: первая клемма источника питания, токопроводящая накладка, шар, токопроводящая дорожка, привод фиксатора, вторая клемма источника питания. Привод фиксатора срабатывает, прекращая перемещение губки. 3 ил.
В исходном положении магнитным потоком, проходящим через шары 9, 10, 11 подвижный магнит 4 самоориентирован относительно магнита 2. После подвода захвата к детали, находящейся в гнезде лотка, включается вакуум- насос привода 8 губок. При этом, под действием низкого давления в полостях цилиндров 13 поршни 14 зажимных губок 5, 6, 7 одновременно втягиваются в цилиндры 13, перемещая пальцы зажимных губок к центру. При касании пальцем губки,, например, губки 6, поверхности захватываемой детали, губка 6 центрирует подвижный магнит 4 относительно оси детали, смещая его в сторону, противоположную направлению движения губки 6. Если первоначальное смещение оси захватываемой детали от центра захватногооустройст- ва больше максимально допустимого смещения осей двух магнитов, то остальная часть смещения компенсируется несимметрией (смещением) самих зажимных губок относительно центра нижнего магнита 4, для чего предусмотрена фиксация зажимных губок. При достижении максимального допустимого смещения магнита 4 шар 10 контакти
рует с дорожкой 17, тем самым через дорожку 17 и шар 10 привод фиксатора 15 подсоединяется к накладке 3 и второй клемме источника питания, фиксатор 15 срабатывает, фиксируя положение губки 6 и. тем самым предо- 1 твращая выход в данном направлении шара 10 за пределы магнита 4. Губки же 5 и 7 продолжают перемещаться.
5 0 5 0 З
0
5
результате зажимные губки расфикси- руются и занимают под действием пружин 19 симметричное относительно оси нижнего магнита 4 положение, при этом деталь окончательно центрируется относительно оси магнитов.
Конструкция предлагаемого захвата обладает расширенными технологическими возможностями, большей величиной устраняемого смещения оси детали от оси устройства, а- также повьш1енной надежностью в работе, так как исключена возможность выхода шаров 10 за пределы магнитов при упоре губки в деталь.
Формула изобретения
Захватное.устройство по авт. св. № 1212782, отличающееся тем, что, с целью повышения надежности и расширения технологических возможностей, оно снабжено источником питания, при этом число шаров равно числу зажимных губок, в каждая зажимная губка снабжена фиксатором с электромагнитным приводом, причем на периферийной части поверхности магнита, установленного с возможностью перемещения, напротив каждой губки закреплены изолированные одна от другой токопроводящие дорожки, имегацие воз- . можность взаимодействия с шарами, при этом шары выполнены из токопроводя- щего материала, а на рабочей поверхности магнита, закрепленного на руке манипулятора, размещена токопроводя- щая накладка, причем электромагнитный
51489983
привод каждого фиксатора и токопро- а токопроводящие дорожки электрически
водящая накладка соединены с соответ- ствуюпщми клеммами источника питания,
У
16
17
а токопроводящие дорожки электрическ
связаны с соответствующими электромагнитными приводами фиксаторов.
Ф.и..1
1Ь
Фиг.2
г
Фиб.З
Редактор И.Сегляник
Составитель С.Грибов
Техред Л.Сердюкова Корректор И.Муска
Заказ 3625/20
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
13
Подписное
| Захватное устройство | 1984 |
|
SU1212782A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
