чивают транспортировку детали независимо от наличия выступающих элементов , и точное ориентирование детали на рабочей позиции, Схват содержит корпус 1, в котором шарнирно на осях 2 установлены захватные рычаги 3, нижние плечи которых соединены пружинок 9, При опускании схвата на деталь 18 подпружиненный упор 10 со- . прикасается с деталью 18, При дальнейшем опускании схвата упор 10 перемещается относительно рычагов 3 и зубья 8 выходят из взаимодействия с
1
Изобретение относится к машиностроению, а именно к захватным устройствам роботов и манипуляторов, предназначенных для механизации и автоматизации технологических процессов ,
, Цель изобретения - расширение технологических возможностей за счет того, что все взаимосвязанные конструктивные элементы схвата обеспечивают транспортировку детали независимо от наличия выступающих эле- ментов и точное ориентирование детали на рабочей позиции.
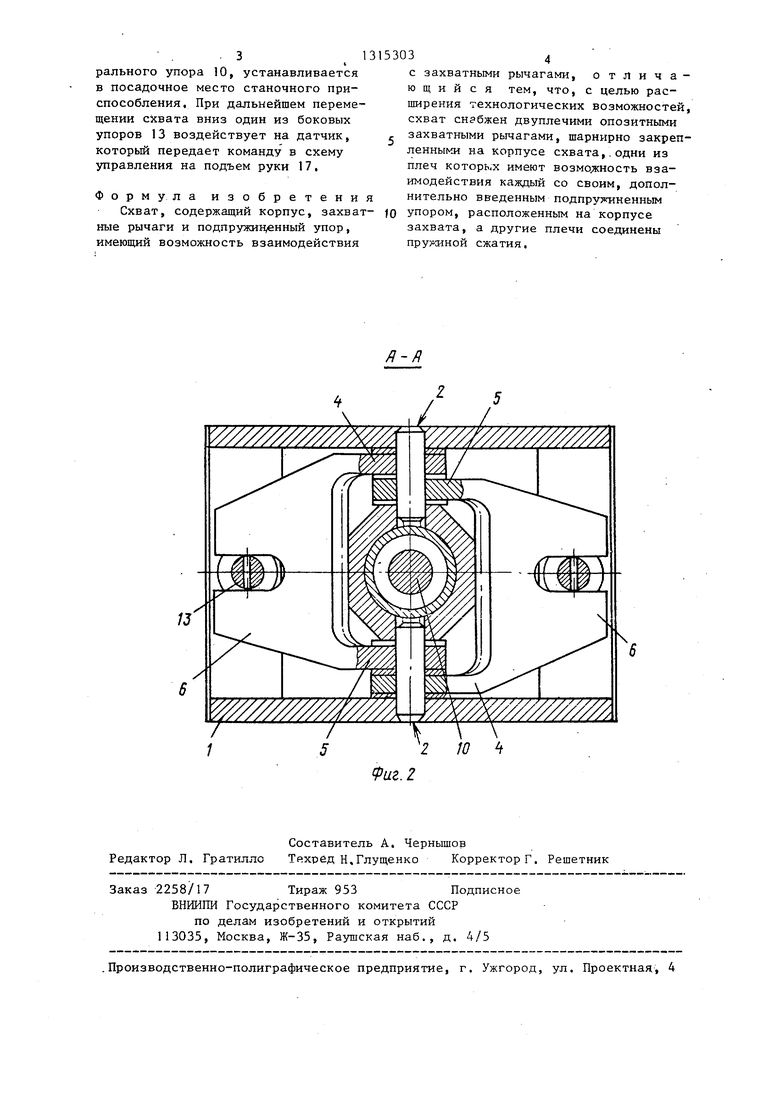
На фиг, 1 изображен схнат с центральным разрезом; на фиг. 2 - разрез А-А на фиг. 1,
Схват состоит из корпуса 1, в котором шарнирно на осях 2 установлены два захватных рычага 3, каждый из которых состоит из внутренних 4 5, верхнего наружного 6 и нижнего 7 плеч. На внутренней поверхности каждого плеча 7 выполнены зубья 8, Плечи 7 захватных рычагов 3 стяги- цаются пружиной 9. В центральной бобышке корпуса 1 установлен центральный упор 10 с кулачком 11, выполненным в виде напрессованной втулки, Упор 10 подпружинен пружиной 12, В отверстиях боковых бобьш1ек корпуса 1 установлены упоры 13 с пружинами 14 и сферическими шайбами 15, На корпусе 1 закреплена поперечина 16, на которой устанавливаются датчики (не показаны.) . Схват крепится на руке 17 манипулятора (робота). Деталь 18 устанавливается в магазине 19, а
кулачком 11, после чего пружина 9 сжимает захватные рычаги и схват захватывает деталь 18. При подходе схвата к загрузочной позиции подпружиненные упоры 13, попадая в базовые фиксаторы рабочего приспособления и упираясь в них, отжимают через шайбы 15 плечи 6 захватных рычагов 3 и деталь 18 освобождается, а под действием пружины 12 центральный упор 10 возвращается в исходное положение , 2 ил.
0
на станке или установке крепится приспособление (не показано),
Работа устройства заключается в том, что исполнительный механизм
манипулятора опускает руку 17 со
схватом к магазину 19 с деталями 18, При этом центральный подпруткиненный упор 10 своим нижним концом (торцом) соприкасается с верхней деталью 18, а исполнительный механизм продолжает опускать корпус 1 схвата с укрепленными на нем захватными рычагами 3 вниз и захватные рычаги 3 таким образом смещаются относительно центрального упора 10, Захватные рычаги 3 перемещаются на величину, необходимую для выхода зубьев 8 нижних 7 из взаимодействия с разжимающим их кулачком 11, после чего пру жины 9 сжимаются и схват захватывает деталь 18 нижними плечами 7, В этот момент верхние торцы зубьев 8 упираются в торец кулачка 11 и удерживают центральный подпружиненный упор 10 от продвижения вниз, а верхний конец упора 10 воздействует на датчик (не показан), который передает команду в схему управления на подъем
руки 17, При подходе руки 17 со схва0-
том к загрузочной позиции станка боковые упоры 13, попадая в базовые фиксаторы рабочего приспособления и упираясь в них, отжимаются через сферические шайбы 15 и верхние на5 ружные плечи 6 раскрывают нижние плечи 7 захватных рычагов 3, следовательно, деталь 18 освобождается и, поджимаемая нижним концом цент5
i
рального упора 0, устанавливается в посадочное место станочного приспособления. При дальнейшем перемещении схвата вниз один из боковых упоров 13 воздействует на датчик, который передает команду в схему управления на подъем руки 17.
Формула изобретени Схват, содержащий корпус, захваные рычаги и подпружиг нный упор, имеющий возможность взаимодействия
153034
с захватными рычагами, отличающийся тем, что, с целью расширения vexнoлoгичecкиx возможностей, схват снабжен двуплечими опозитными захватными рычагами, щарнирно закрепленными на корпусе схвата,.одни из плеч которых имеют возможность взаимодействия каждый со своим, дополнительно введенным подпружиненным Ш упором, расположенным на корпусе захвата, а другие плечи соединены пружиной сжатия.
/L
///////// / т
т ///////тту.
w//// /mm 22
/
1
Составитель А. Чернышов Редактор Л, Гратилло Техред Н.Глущенко Корректор Г. Решетник
Заказ 2258/17 Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
,
W 4
fpue.Z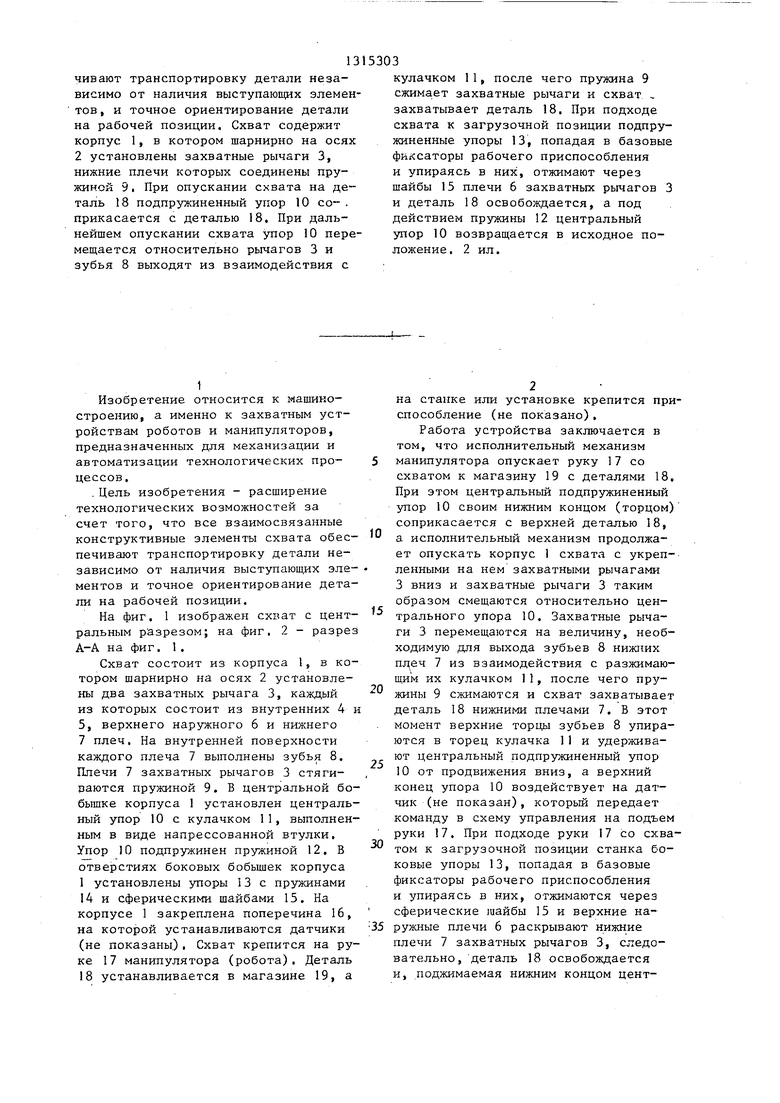
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| СХВАТ ДЛЯ ТОНКОСТЕННЫХ ДЕТАЛЕЙ | 2003 |
|
RU2253563C2 |
| Манипулятор для транспортировки спутников | 1986 |
|
SU1419882A1 |
| Схват промышленного робота | 1987 |
|
SU1516349A1 |
| Захватное устройство | 1987 |
|
SU1495119A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам роботов и манипуляторов, предназначенных для механизации и автоматизации технологических Процессов. Цель изобретения - расширение технологических возможностей за счет того, что все взаимосвязанные конструктивные элементы схвата обеспе (/) Фиг.1
| Захват манипулятора | 1981 |
|
SU982899A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
