22
Г6 17 fff f (fius.1
(Л
4 00 О ГчЭ
а со
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов и промышленных роботов, и может найти применение при автоматизации сборочных и погрузочно-разгрузочных процессов.
Цель изобретения - повышение надежности.
На фиг. 1 изображен предлагаемый захват, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - камера в свободном состоянии.
Захват содержит корпус 1 с проточкой 2, осевым 3 и радиальными 4 каналами для подвода сжатого воздуха. На расширяющуюся к концу корпуса 1 коническую поверхность 5 надета надувная эластичная камера 6, выполненная в виде стакана, герметически поджатая к корпусу 1 гайкой 7, воздействующей на отогнутую кромку стакана через промежуточную втулку 8, снабженную выступом 9, западающим в паз 10 корпуса 1. Внутренняя поверхность камеры 6 выполнена конической, идентичной с сопряженной с ней поверхностью 5, а наружная - цилиндрической за счет утончения боковой стенки 11 к нижней стенке, т. е. ко дну стакана, выполненному в виде бобышки 12 с кольцевыми гофрами 13. Сквозь отверстие бобышки 12 и канал 3 проходит стержень винта 14, лысками 15 контактирующего со стенками паза 16 канала 3, головкой 17 размещенного в гнезде 18, а резьбовым концом взаимодействующего с гайкой 19, опирающейся на дно проточки 2 и снабженной отверстиями 20. Деталь 21 имеет отверстие 22.
Захват работает следующим образом.
При подводе захвата к детали 21 корпус 1 с камерой 6 входит в ее отверстие 22. После этого камера 6 раздувается сжатым воздухом, поступающим в проточку 2, а оттуда через отверстие 20 гайки 19 и каналы 3 и 4 - под внутреннюю поверхность стенки 11. Камера 6, раздуваясь, стенкой 11 плотно поджимается к боковой поверхности отверстия 22, чем достигается фиксация детали 21 в захвате и ее удержание на корпусе 1 при последующем переносе к позиции разгрузки. За счет утончения стенки 11 у дна стакана, вызывающего повыщенную степень деформации данного утонченного участка по сравнению с другими зонами камеры 6, наибольшие усилия прижима возникают вблизи дна отверстия 22. В процессе описываемой деформации утолщенная бобыщка 12 и гоф- рь1 13, препятствуя раздуванию дна камеры б
в сторону дна отверстия 22, способствует радиальному расширению утонченной части стенки 11, а примыкающая к втулке 8 зона рабочей части камеры, расположенная вне отверстия 22, несмотря на отсутствие ограничивающей поверхности расщиряется незначительно благодаря максимальной толщине стенки 11 в описанной зоне. Утопленное положение головки 17 винта 14 в гнезде 18 позволяет увеличить полезную длину рабочей части камеры 6 в отверстии 22. Указан5 ные особенности конструкции и процесса расщирения камеры 6 позволяют предотвратить сползание детали 21 с корпуса 1 захвата при малой глубине отверстия 22.
Фиксация от поворота винта 14 в канале 3 корпуса 1 посредством контакта лы0 сок 15 со стенками паза 16, а также втулки 8 за счет установки ее выступа 9 в пазу 10 оправки предохраняет камеру 6 от нежелательных деформаций скручивания при монтаже устройства. Затяжка винта 14 гай5 кой 19, находящейся в проточке 2, предохраняет камеру 6 от случайных воздействий инструмента, осуществляющего указанную затяжку. При этом отверстия 20 гайки 19, используемые для передачи крутящего момента сборочным инструментом, являются
0 также и каналами для подвода сжатого воздуха.
Формула изобретения
Пневматический захват, содержащий корпус в виде тела вращения с каналами
для подвода сжатого воздуха, надувную эластичную камеру в виде стакана, закрепленного на боковой поверхности корпуса и в центральной части рабочего торца корпуса, отличающийся тем, что, с целью повы- щения надежности, боковая стенка стакана выполнена переменной толщины, уменьщаю- щейся в сторону рабочего торца корпуса, а стенка стакана со стороны рабочего торца корпуса - гофрированной, при этом корпус выполнен в виде усеченного конуса, причем
увеличение радиуса усеченного конуса равно уменьщению толщины боковой стенки стакана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Механизм для открывания и закрывания откидной крышки ящика | 1985 |
|
SU1339050A1 |
| Захватное устройство | 1985 |
|
SU1247269A1 |
| Устройство определения положения деталей | 1986 |
|
SU1421484A1 |
| Устройство для ориентации и сборки деталей | 1987 |
|
SU1414638A1 |
| Устройство для соединения ступицы с концом вала | 1986 |
|
SU1368510A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Загрузочный вибробункер | 1984 |
|
SU1243869A1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1996 |
|
RU2130377C1 |

Изобретение относится к области машиностроения, в частности к захватным устройствам промышленных роботов. Целью изобретения является повышение надежности. Для этого на корпусе 1, выполненном в виде усеченного конуса, закреплена надувная эластичная камера 6. Боковая стенка 11 камеры 6 имеет переменную толш,ину. Нижняя стенка камеры 6 выполнена гофрированной и закреплена на рабочем торце корпуса 1 бобышкой 12. При захвате детали 21 сжатый воздух подается по каналам 3 и 4 в камеру 6. За счет утончения нижней части стенки I1 происходит ее радиальное расширение и надежный захват детали 21 поверхностью отверстия 22, имеющего небольшую глубину. 3 ил.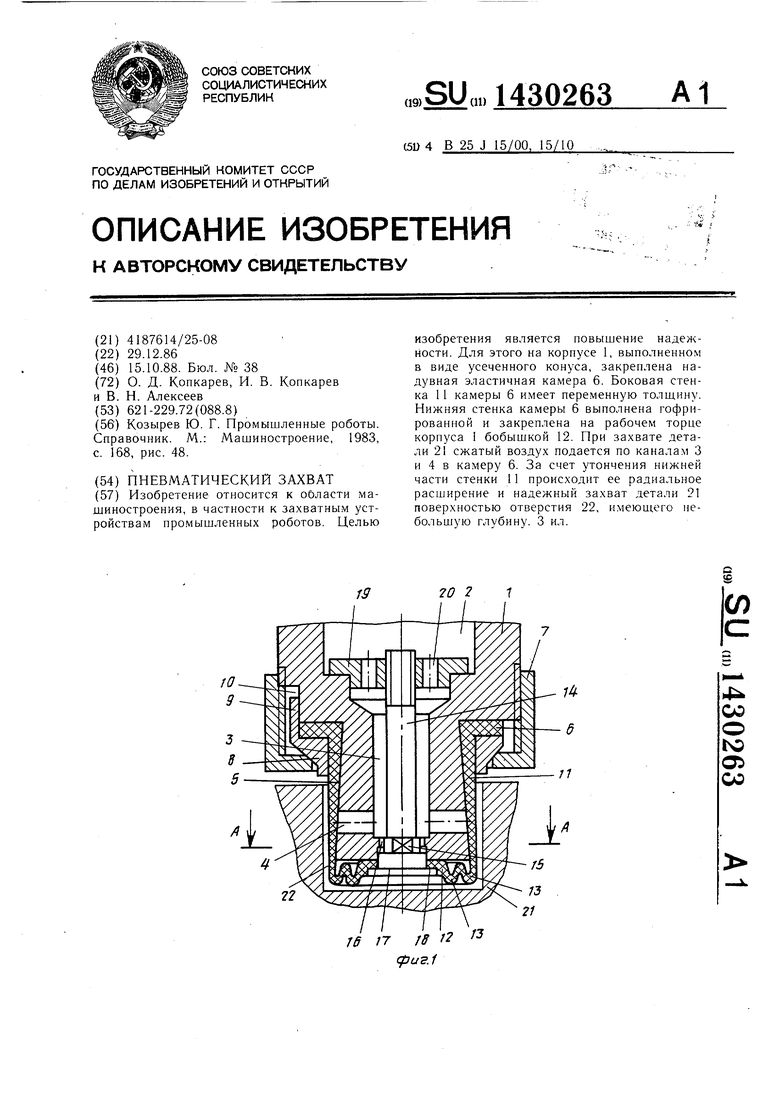
| Козырев Ю | |||
| Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
