1348130
Каждый прихват выполнен в виде уста-упорами скобы 6. Приводные элементы
новленной в качающейся опоре 7 под-выполнены в виде соосно расположенпружиненной посредством пружины 9 сных в корпусе 2 подпружиненных толкабоковым 10 и нижним II регулируемымителей. 5 ил.
1
Изобретение относится к обработке материалов резанием, а именно к устройствам для закрепления приспособлений-спутников на сменных столах металлорежущих станков.
Цель изобретения - расширение технологических возможностей устройства путем загрузки его роботом как сверху, так и сбоку.
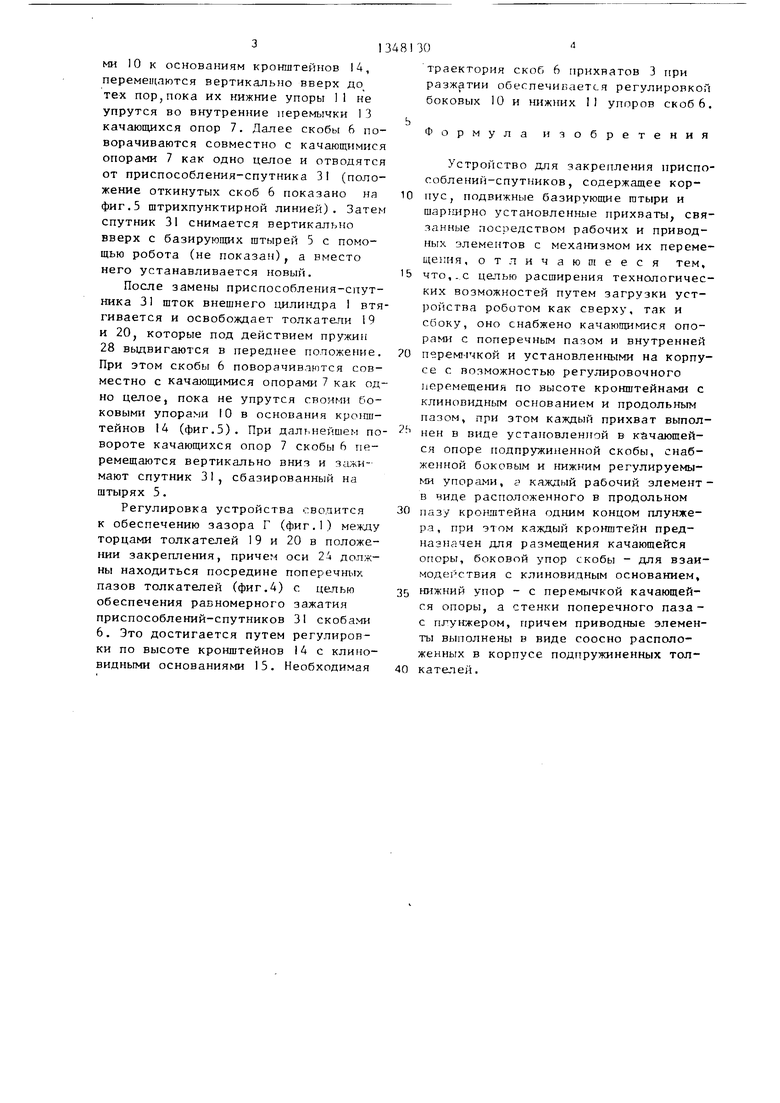
На фиг.1 изображено устройство, общий вид сверхуJ на фиг.2 - разрез А-А на фиг.I в положении закрепления приспособления-спутника; на фиг.З - разрез Б-Б на фиг. Г; на фиг.4 - разрез В-В на фиг.1; на фиг.З - разрез А-А на фиг.1 в положении раскрепления приспособления-спутника.
Устройство для закрепления приспособлений-спутников работает от внешнего цилиндра 1 и содержит корпус 2, в котором смонтированы прихваты 3, механизм 4 их перемещения и базирующие штыри 5.
Прихваты 3 включают скобы 6, шар- нирно установленные на качающихся опорах 7 посредством осей 8 и снабженные наружными нажимными пружинами 9 и боковыми. 10 и нижними II регулируемыми упорами. Качающиеся опоры 7 выполнены Н-образной формы с поперечными пазами 12 и внутренними перемычками 13 и шарнирно установлены в кронштейнах 14 с клиновидными основаниями 15. Кронштейн 14 прикреплены к боковым сторонам корпуса 2 устройства с возможностью регулировочного перемещения винтами 16 с косыми шайбами I7, входящими в продольные пазы 18, вьшолненные на клиновидном основании 15.
Механизм перемещения прихватов 3 содержит приводные элементы-толкатели 19 и 20, каждый из которых связан тягами 21 и 22 и рабочими элемента- ни - плунжерами 23 с двумя противоположно расположенными качающимися опорами 7 прихватов 3. Тяги 21 и 22 шарнирно соединены друг с другом, а также с плунжерами 23 посредством осей 24 и 25 соответственно, причем оси 24 расположены в поперечных пазах толкателей 19 и 20. Плунжеры 23 шарнирно соединены с качающимися опордми 7 прихватов 3 осями 26, которые расположены в поперечных пазах I2 качающихся опор 7.
На толкателях 19 и 20 установлены с помощью стопорных колец 27 пружины
28. Пружина 28 толкателя 19 упирается в упор 29, прикрепленный к корпусу 2 устройства.
Конические базирующие штыри 5 установлены в расточках корпуса 2 устройства и поджимаются кверху прутки- нами 30 для фиксации приспособления- спутника 31 .
Устройство работает следующим об- разом.
Пружины 28 через кольца 27 воздействуют на толкатели 19 и 20, которые посредством осей 24 передают усилия от пружин через тяги 21 и 22 на плунжеры 23. Последние воздействуют через оси 26 на качающиеся опоры 7 , которые стремятся повернуться и опустить скобы 6. Скобы 6 прижимают спутник 31 к базовой поверхности корпуса 2.
Для разжатия приспособления-спутника 31 при его замене.срабатывает внешний цилиндр 1, шток которого выдвигается и перемещает толкатели 19 и 20 внутрь корпуса 2 устройства, сжимая при этом пружины 28. Толкатели 19 и 20 воздействуют через тяги 21 н 22 и плунжеры 23 на качаюпщеся опоры 7 прихватов, поворачивая их так, что скобы 6 поднимаются. При этом скобы 6, прижатые под воздействием пружин 9 своими боковыми упора
313
ми 10 к основаниям кронштейнов 14, перемещаются вертикально вверх до тех пор,пока их нижние упоры 11 не упрутся во внутренние перемычки 13 качающихся опор 7. Далее скобы 6 поворачиваются совместно с качающимися опорами 7 как одно целое и отводятся от приспособления-спутника 31 (положение откинутых скоб 6 показано на фиг,5 штрихпунктирной линией). Затем спутник 31 снимается вертикально вверх с базирующих штырей 5 с помощью робота (не показан), а вместо него устанавливается новый.
После замены приспособления-спутника 31 шток внешнего цилиндра 1 втягивается и освобождает толкатепи 19 и 20, которые под действием пружин 28 выдвигаются в переднее положение. При этом скобы 6 поворачиваются совместно с качающимися опорами 7 как одно целое, пока не упрутся своими боковыми упорами IО в основания кронштейнов 14 (фиг.5). При дальнейшем по вороте качающихся опор 7 скобы 6 перемещаются вертикально вниз и згики- мают спутник 31, сбазированный на штырях 5.
Регулировка устройства сводится к обеспечению зазора Г (фиг.1) между торцами толкателей 19 и 20 в положении закрепления, причем оси 24 должны находиться посредине nonepe4Hiiix пазов толкателей (фиг.4) с целью обеспечения равномерного зажатия приспособлений-спутников 31 скобами 6. Это достигается путем регулировки по высоте кронштейнов 14 с клиновидными основаниями 15. Необходимая
0
траектория скоб 6 прихватов 3 при разжатии обеспечивается регулировкой боковых 10 и нижних 11 упоров скоб 6.
Формула изобретения
Устройство для закрепления приспособлений-спутников, содержащее корпус, подвижные базирующие штыри и шарьшрно установленные прихваты, связанные посредством рабочих и приводных элементов с механизмом их перемещения, отличающееся тем, что,-С целью расширения технологических возможностей путем загрузки устройства роботом как сверху, так и сбоку, оно снабжено качающимися опорами с поперечным пазом и внутренней перем1-1чкой и установленными на корпусе с возможностью регулировочного перемещения по высоте кронштейнами с клиновидным основанием и продольным пазом, при зтом каждый прихват выполнен в виде установленной в качающейся опоре подпружиненной скобы, снабженной боковым и нижним регулируемыми , э каждый рабочий элемент- в чиде расположенного в продольном пазу кронштейна одним концом плунжера, при этом каждый кронштейн предназначен для размещения качающейт я опоры, боковой упор скобы - для взаимодействия с клиновидным основанием, нижний упор - с перемычкой качающейся опоры, а стенки поперечного паза- с плунжером, причем приводные элементы выполнены в виде соосно расположенных в корпусе подпружиненных толкателей.
JLi
В 5
фие.З
fpuzA
liA
2
Редактор А.Огар
Составитель А.Никифоров
Техред М.МоргенталКорректор И.Эрдейи
Заказ 5151/13
Тираж 785Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
VU2.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| Автоматизированная сборочная линия | 1982 |
|
SU1020207A1 |
| Агрегатный станок | 1982 |
|
SU1042957A1 |
| АГРЕГАТНЫЙ СТАНОК С ЧПУ | 1991 |
|
RU2080974C1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Фрезерный станок | 1984 |
|
SU1210999A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| ЗАЖИМНОЕ ПРИСПОСОБЛЕНИЕ | 1992 |
|
RU2021879C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |

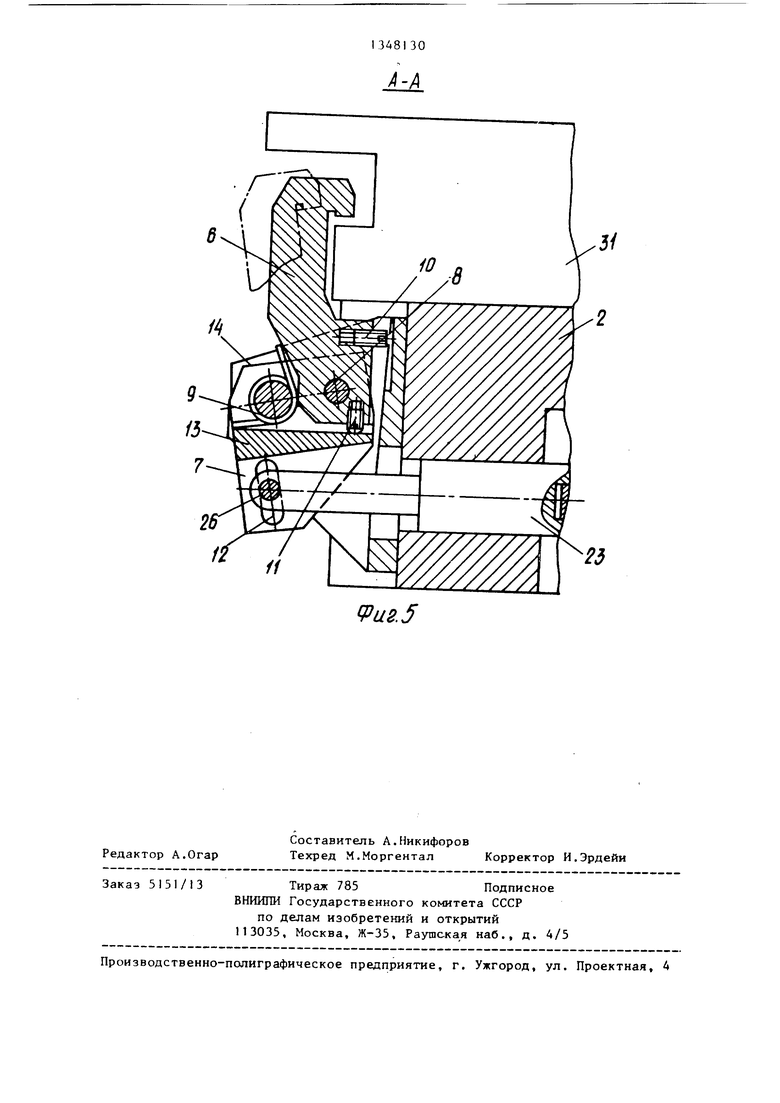
Изобретение относится к обработке материалов резанием а именно к устройствам для закрепления приспоА-А соблений-спутников на сменных столах металлорежущих станков, Изобретение расширяет технологические возможности путем загрузки устройства роботом как сверху, так и сбоку. В корпусе 2 размещены качающиеся опоры 7 с поперечными пазами 12 и внутренними перемычками 13, которые шарнирно закреплены в кронштейнах 14 с клиновидным основанием 15. Кронштейны 14 закреплены на корпусе 2 с возможностью регулировочного перемещения и имеют продопьные пазы 18, в которых расположены рабочие элементы-плунжеры 23. (Л со 4 ЭО 00 Фигг 25
| Устройство для фиксации и зажима приспособлений-спутников | 1979 |
|
SU870056A1 |
| кл, В 23 Q 3/00, 1979. | |||
