Изобретение относится к строительной технике, а точнее к технике прокладки трасс с заданным уклоном к горизонту, например, в мелиорации.
Цель изобретения - повышение точности прокладки и производительности.
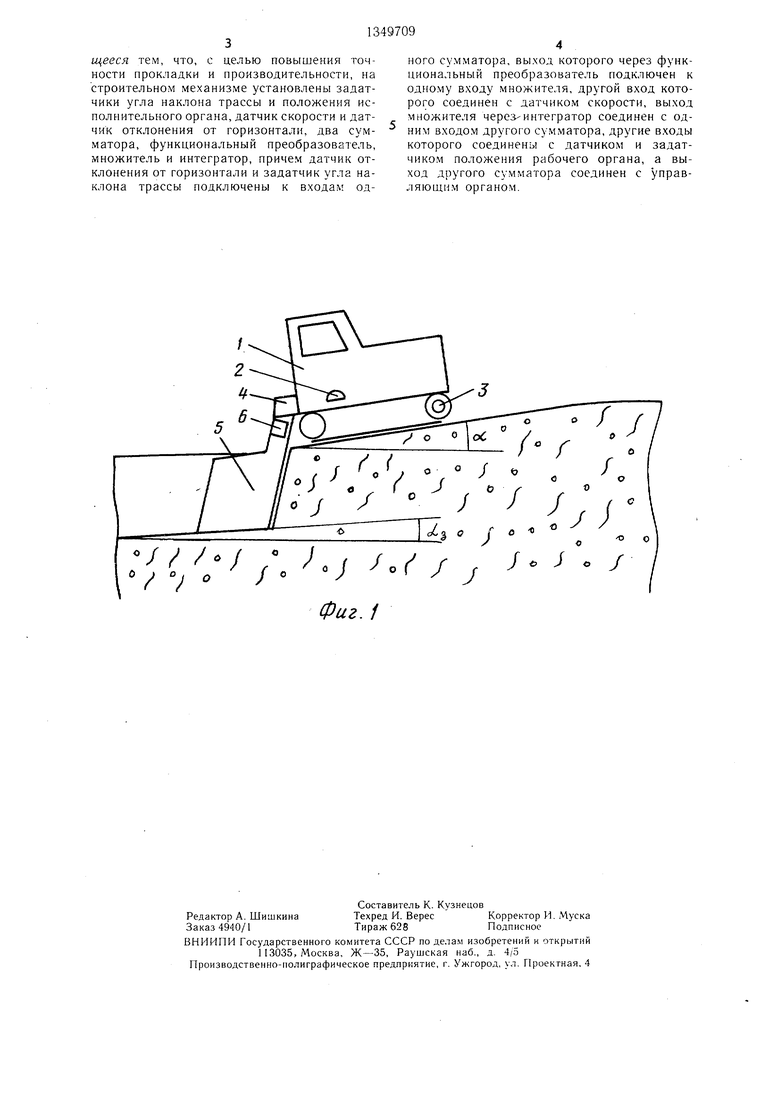
На фиг. 1 показан строительный механизм; на фиг. 2 - функциональная схе.ма устройства.
Устройство содержит строительный механизм 1, датчик 2 отклонения (продольной оси строительного механизма) от горизонтали, датчик 3 скорости, управляющий орган 4, исполнительный орган 5 строительного механизма, датчик 6 положения исполнительного органа, задатчик 7 угла наклона трассы, первый сумматор 8, функциональный преобразователь 9 (синусный), множитель 10, интегратор 11, второй сумматор 12, задатчик 13 (начального) положения исполнительного органа.
В качестве датчика 2 отклонения от горизонтали используют гироскопический датчик, имеюш,ий аналоговый выходной сигнал. Датчик 3 скорости выполнен на та- хогенераторе постоянного тока, датчик 6 положения представляет собой реостатяый датчик.
Функциональный (синусный) преобразователь 9 представляет собой промышленный нелинейный преобразователь БНФ--31,, реализующий нелинейное преобразование входной величины в выходную но формуле UBIJX Uo sin (Uiix).
Управляющий орган 4 состоит из входного электрогидравлического преобразователя (усилителя) и гидравлического исполнительного механизма. В качестве входного преобразователя может быть использован электрогидроусилитель типа ПЭГ- ПМЗ, а в качестве гидравлического исполнительного механизма - механизм типа МГП 3.
Устройство работает следующим образом.
В начале трассы с помощью задатчи- ка 13 управляющий орган 4 устанавливает исполнительный орган 5 в начальное положение. На выходе интегратора 1 1 сигнал равен нулю, а су.мма сигналов датчика 6 положения исполнительного органа и задатчика 13, получаемая на выходе сумматора 12 при переходе исполнительного органа 5 в начальное положение, также равна нулю. На вход интегратора 11 поступает сигнал, равный произведению сиг-налов скорости строительного механизма с датчика 3 и синуса угла наклона продольной оси строительного механизма 1 по от- нощению к заданному наклону трассы, поступающего с выхода функционального преобразователя 10. Функциональный преобразователь 10 формирует сигнал, пропорциональный синусу алгебраической суммы углов, формируемой на выходе сумматора 8 по сигналам задатчика угла наклона и датчика 2 угла отклонения строительного механизма от горизонтали. Таким образом, на входе интегратора получают сигнал, пропорциональный вертикальной скорости пере- мещения строительного механизма относительно заданной трассы. На выходе инте- 1 ратора получают сигнал
i
SB 5 V sin (а-аз) ott,
о
где V-скорость перемещения строительноа -
s
0
5
0
0
5
0
5
а.з -
отклонение продольной оси строительного механизма от горизонтали; заданный угол прокладываемой трассы к горизонтали; t - текущее время;
SB - вертикальное перемещение строительного механизма.
Электрический сигнал, поступающий на вход преобразователя 9, преобразуется в перемещение золотника, смещающегося в ту или иную сторону в зависимости от знака поступающего сигнала. Золотник открывает доступ на поступление масла в соответствующую полость гидравлического исполнительного механизма, осуществляющего перемещение Исполнительного органа 5 строительного механизма. Перемещение происходит до тех пор , пока сумма сигналов, поступающих на вход сумматора 12 с интегратора 11, датчика 6 положения исполнительного органа (сигнал с которого изменяется по мере изменения положения исполнительного органа о) и задатчика 13 начального положения, не станет ра-вной нулю. Сигнал, поступаюьций на управляющий орган 4, становится равным нулю. Зо- г лотник электрического преобразователя возвращается в исходное положение и поступление .масла в гидравлический исполнительный .механизм прекраилается, а следовательно, прекращается и перемещение исполнительного органа 5. Таки.м образом, реализуется управление исполнительным органо.м 5 в соответствии с заданием.
Применение устройства позволяет оператору строительного механизма автономно, без использования дополнительной рабочей силы, прокладывать трассу в соответствии с заданными начальны.ми и промежуточными условиями, независимо от метеорологических условий. Кроме того, исключаются простои строительного механизма, необходимые для установки копирных (лучевых или тросовых) устройств при переходе с одной трассы на другую. Указанные положительные эффекты позволяют повысить производительность строительного механизма.
Формула изобретения Устройство для прокладки трасс с заданным уклоном к горизонту, содержащее управляющий и исполнительный органы строительного механизма с датчиком положения исполнительного органа, отличаю3
щееся тем, что, с целью повышения точности прокладки и производительности, на строительном механизме установлены задат- чики угла наклона трассы и положения исполнительного органа, датчик скорости и датчик отклонения от горизонтали, два сумматора, функциональный преобразователь множитель и интегратор, причем датчик отклонения от горизонтали и задатчик угла наклона трассы подключены к входам од
ного сумматора, выход которого через функциональный преобразователь подключен к одному входу множителя, другой вход которого соединен с датчиком скорости, выход множителя череа-интегратор соединен с одним входом другого сумматора, другие входы которого соединены с датчиком и задат- чиком положения рабочего органа, а выход другого сумматора соединен с управляющим органом.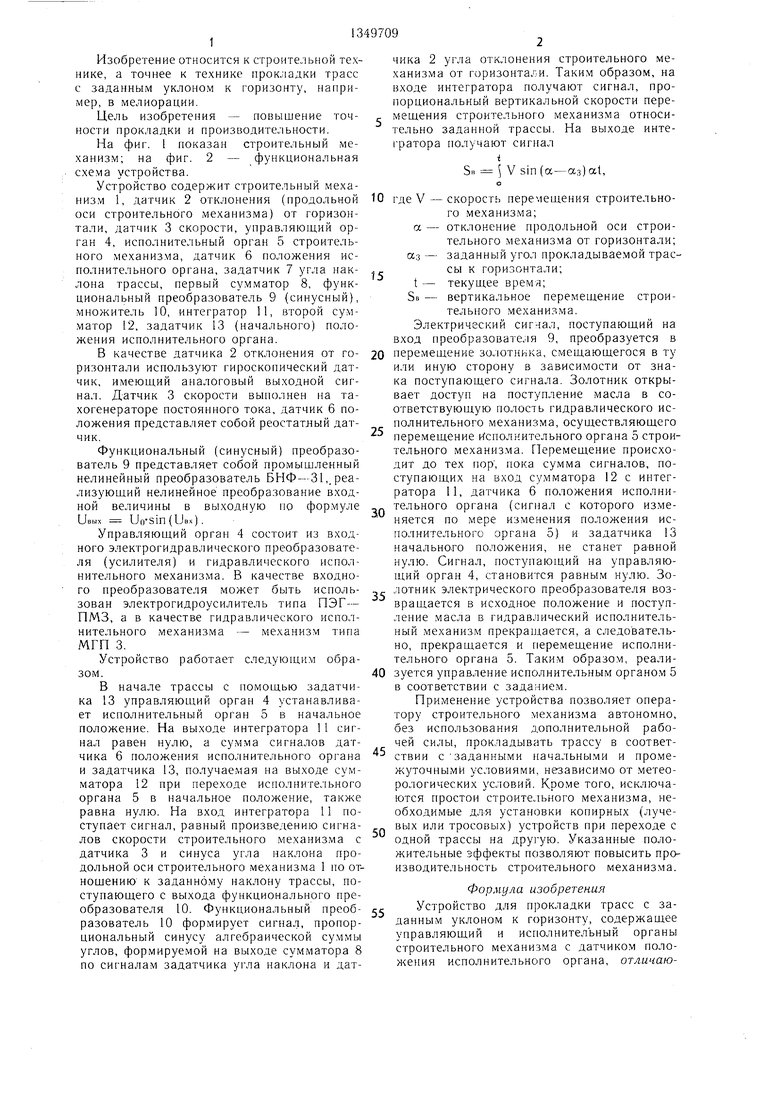
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Устройство управления положением рабочего органа землеройно-транспортной машины | 1989 |
|
SU1647091A1 |
| Вычислитель угла атаки | 1982 |
|
SU1072069A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Устройство стабилизации угла наклона рабочего органа землеройно-планировочной машины | 1987 |
|
SU1520199A1 |
| Рулевое устройство колесного транспортного средства | 1978 |
|
SU766941A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
Изобретение относится к строительной технике, точнее к технике прокладки трасс с заданным уклоном к горизонту, например, в мел110рации, позволяет повысить точность прокладки и производительность. Содержит cTpoHTevibHbifi механизм, датчик 2 отклонения от горизонтали, датчик 3 ср;орости, управляющий орган 4, исполнительный орган строительного механизма, датчик 6 положения исполнительного органа, задатчик 7 угла наклона трассы, первый сумматор 8, функциональный преобразователь 9 (синусный), множитель 10, интегратор 11, второй сумматор 12, задатчик 13 (начального) положения исполнительного органа. 2 ил. Фиг. 2 (Л СО 4 СО о со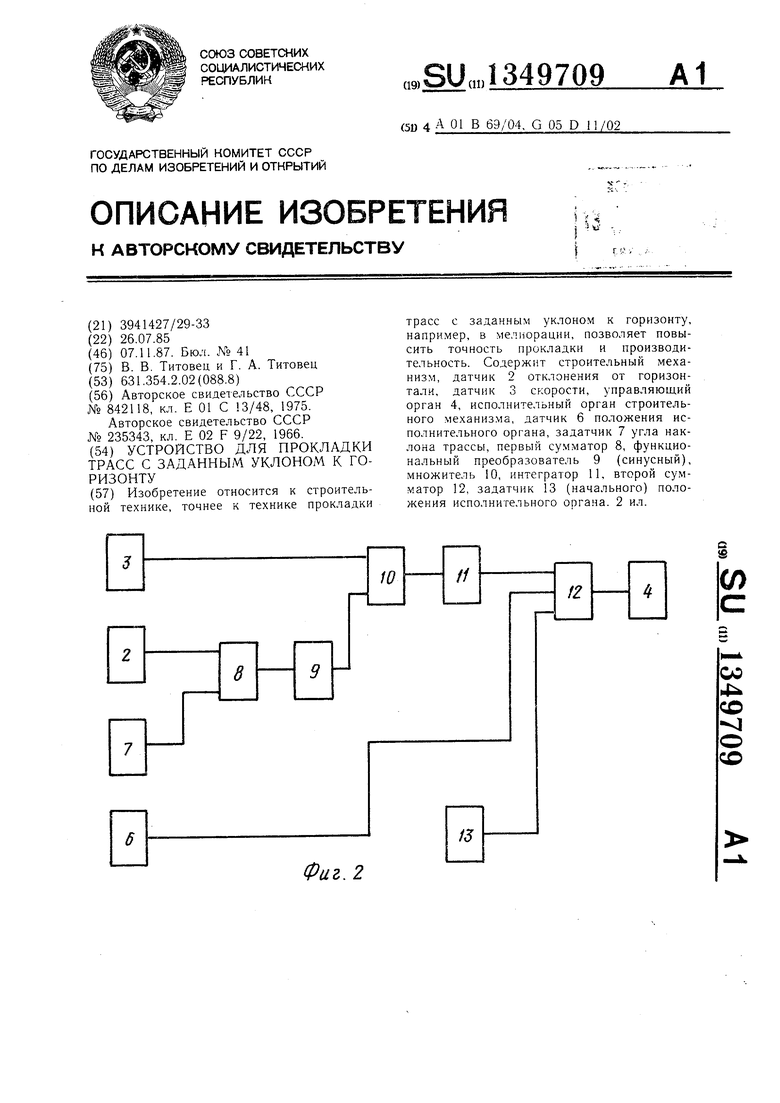
{(
/ V
у
/. J о /
Фиг. 1
| Копирное устройство | 1978 |
|
SU842118A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ | 0 |
|
SU235343A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
