Изобретение относится к машиностроению, а именно к манипуляторам копирующего типа.
Цель изобретения - повышение точности позиционирования иеполнительного органа за счет обеспечения его плоскопарал- .пельного перемещения и упрощение конструкции.
На фиг. 1 изображена с.кема манипулятора, иервое положение одного из датчиков; на фиг. 2 - то же, второе положение одного из датчиков.
Манипулятор содержит стрелу, состоящую из шарнирно соединенных звеньев 1-б, образующих два нараллелограммных механизма, имеющих общее звено 3, при этом звенья 1 и 2 щарнирно связаны с основанием, а звено 6 - с исполнительным органом манипулятора.
Кроме того, манипулятор содержит рукоятку управления,еостояпдую из двух шарнир- но связанных звеньев 7 и 8, и следящую систему, включающую два привода поворота: первый 9 и второй 10, две пары датчиков П, 12 и 13, 14 углового положения, преобразователи: первый 15 и второй 16. Вход преобразователя 15 соединен с выходами, электрически свя- занны.ми собой датчиками 1 1 и 12, а его выход - с управляющим входом привода 9. Вход преобразователя 16 соединен с выходами электрически связанных между собой датчиков 13 и 14.
Датчики каждой п;;|:)ы установ.аены соответствен ко, одпн -- ;а рукоятке управления, другой - на манипуляторе, при 3To;vi датчик 11 rBH:iai; с основанием и звеном 7 рукоятки, а соответствующий e.iy датчик 12 - со смежными звеньями второго па- раллелограммного механизма, i:anpn.iep 3 и 5, или со звеном 4 и исполнительным органом, который жестко связан со звеном 6. Датчики 13 и 14 второй пары установле- пь1 соответственно : . ,ми 7 и 8 рукоятки и между звенья: 1И 1 и 5 манипулятора. Источник 17 энергии связан с приводами 9 и К).
Манипулятор работает СоТедуюгцим образом.
В HCxo.iUiO.M положении звенья 7 и 8 рукоятки ynpaB. leHnfj параллельны соответственно звеньям 1, 5 и 2, 4 стрелы манипулятора. Вследствие того, что звенья рукоятки цеггтралгзмо-симметричны звенья.м стрелы, датчик 13 фиксирует угол а , рав- ный углу а поворота звена I относитель- {0 звена 5. Hpi-: этом, поскольку звен;,я стрелы образуют параллелограмм ный .мек;-;.- иизм, обеспечивается плосконараллелькос 11еремеп.1епие испо.лните..1ьнс 1го органа, ксуго- рый так же. как и звс:1ья 3, 6 может служить базой .тля измерения угла (3.
Г
Перемещение звеньев / и к рукоятки ;ри- вол.ит к появленик) скгна.лов рассогласования в следян-ей сисгеме, котооые, поступая через иреобразовате,;:и 15 и 16 ira управляющие входь :р - водов .9 и 10, обеспечивают перемеи екие звеньев л а уиг улято- ра до вьпюлнения ус. ;; . При зтом обеспечивается .мнемоничь ость :к;.1еме- щения исполиктельпого органа манипулятора и конца звена 8 рукоятки., связан- с рукой оператор:-..
5
0
S
Манипулятор, содержащий стрелу, состоящую из н арнирпо связанных звеньев, рукоятку уиравлени5 и следяпдую систему, включающую два нр; ;вода поворота, управ- ляю1цие входы KOTopbix связаны с выходами coo i BeTCTByionj.iix преобразователей, и две пары датчиков yi-лово. О :оложения, при этом выходь датчике:;; каждой электрически связана меж.ху собой и с входом соответствую1де|-о ;:рсобразователя, сами датчики связа11Ь: один --- со звеньями рукоятки упрааления. а ; ругой --- со звеньями ).:1итэра, or.iuHaioutuilcfi тем, что, с це.:1ью повын;ения точнос -и позиционирования исполнительного оргака за счет обеспечения его илоскопараллел.ьного перемещения и упрон1ения конструкции, звенья стрелы связаны меж.чу собой то 1олиите.;|;5 10 введенным обпхкм звепом и обра:г от два на- ;)алле. 1ограммнь;х ме ;аг:ИЗл:а, пара.г лельные :шеиья ivepBoro из (спторь;): иаркь::::по свя- запы с оспооани;.:л;, , (д:10 ставляк)Н1н:; второй пар :;. ;.-|. хаиизм, pt:ci;o:ia xe, му звену, жестко с язано ным органом, при STOvi первый при:;()д поворота устагюв.тен между основаHI-ICM и одним из звеньев манипулятора, щарнирпо связанных с основанием, а вгорой привод уста- говлен между одним тора, связаинь1Х шар с. 1ежньг 1 e.v . 1лело1-р управ.теиия но свя:)а1Л-1Ь
ОДНО|Т} из I
из звепьев ) ля- прио с осиозаиием. и сОразуюпл- м в:-оро:; (анизм, а р лвух
в. 1 олг-ц
динс1 ; ым :и еньямн, ij i O)Oi-o па
ПК ЗЫХОДЬ
n.}von;)a:i03 :: :Ч)оой пяр; ;:о звсП1:ЯМи р;
:., Об;Э- ЗУ ОЧ1
згорогч) napsjiJie.ficrp зх в:11х(дь: сое.хиксиы пс;:/вого
Фи2. 1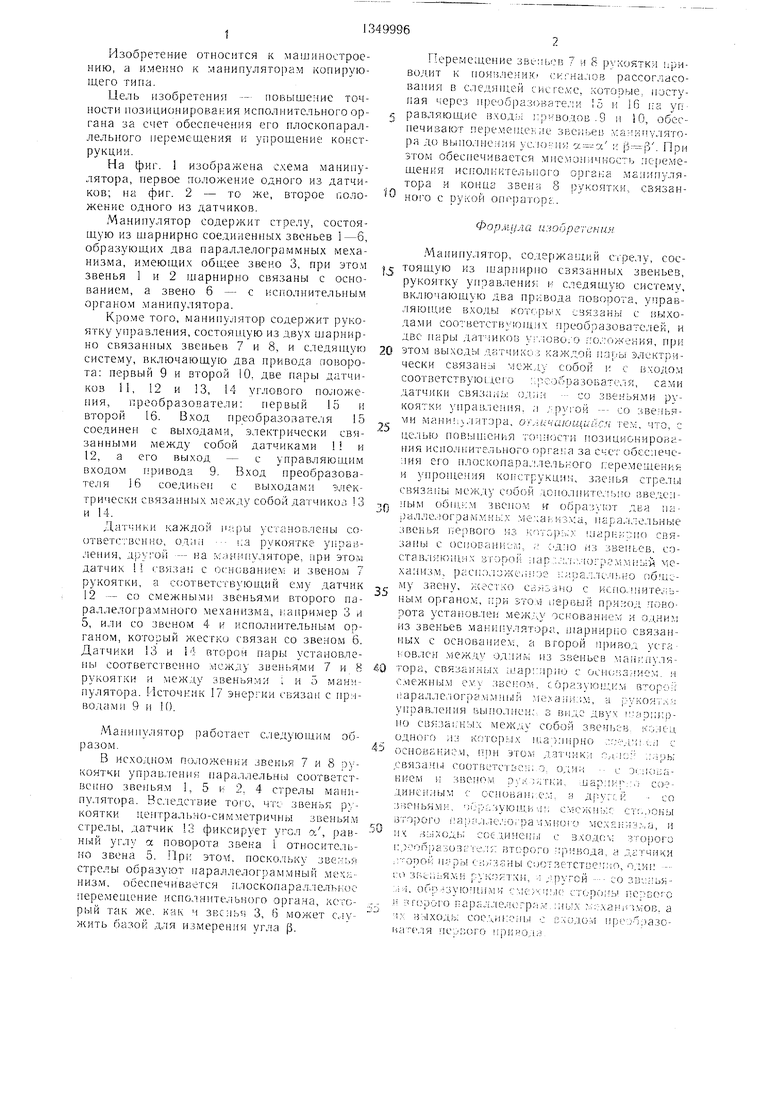
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU529072A1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Манипулятор | 1976 |
|
SU766852A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| Манипулятор | 1982 |
|
SU1114549A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| Задающее устройство копирующего манипулятора | 1987 |
|
SU1437209A1 |
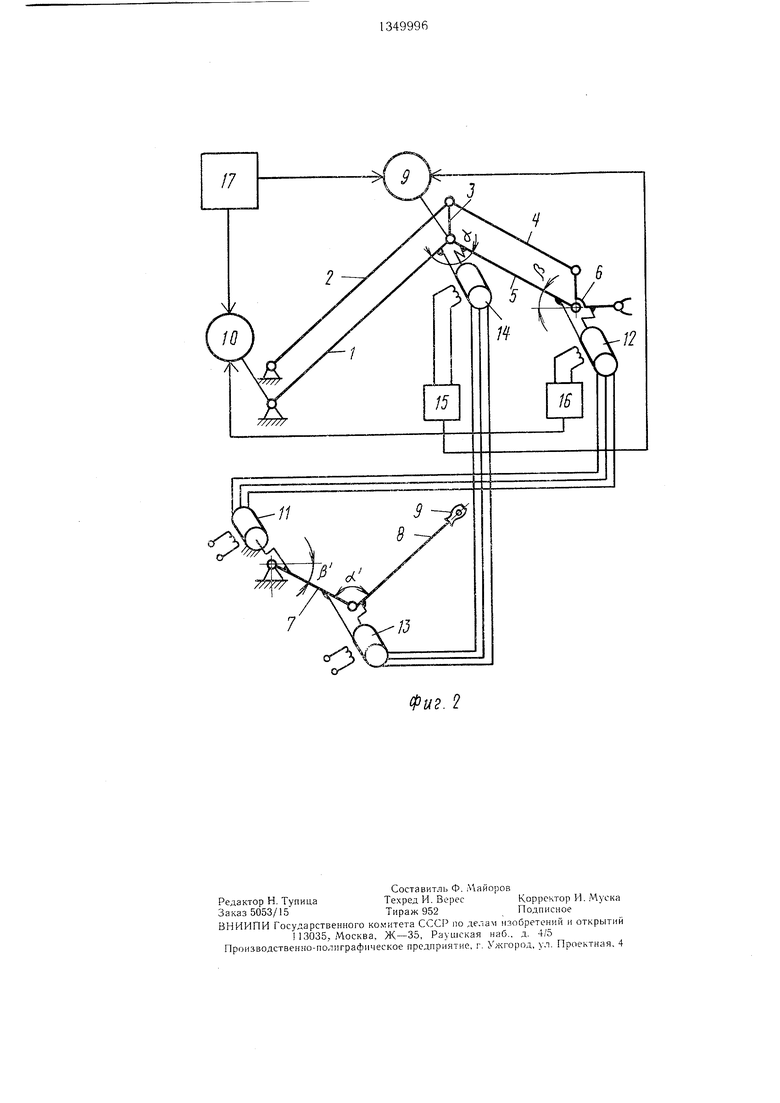
Изобретение относится к машиностроению, а именно к манипуляторам копирующего типа. Целью изобретения явл-яется повышение точности позиционирования исполнительного органа за счет обеспечения его плоскопараллельного перемещения и упрощение конструкции. При перемещении звеньев рукоятки управления, которые расположены параллельно звеньям 5, 4 и 1,2 манипулятора, под действием следящей системы, включающей два привода 9, 10 со своими преобразователями 15 и 16 и две пары датчиков углового положения И, 12 и 13, 14, происходит перемещение звеньев манипулятора до положения, при котором угол , а . В процессе управления манипулятором обеспечивается мнемоничность перемещения исполнительного органа манипулятора и конца звена 8 рукоятки, связанного с рукой оператора. 2 ил. (Л со 4 СО СО СО 05
| Манипулятор для монтажных и погрузочно-разгрузочных работ | 1982 |
|
SU1065850A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
