1
РТзобретение относится к машинам непрерывного транспорта, а именно к кантователям плоских легкоповреждаемых предметов в сельскохозяйственном и других производствах, и может быть использовано на заводах по обработке каракулевого сырья при ориентировани каракулевых шкурок.
Цель изобретения - повьшение надежности переворота плоских предмето
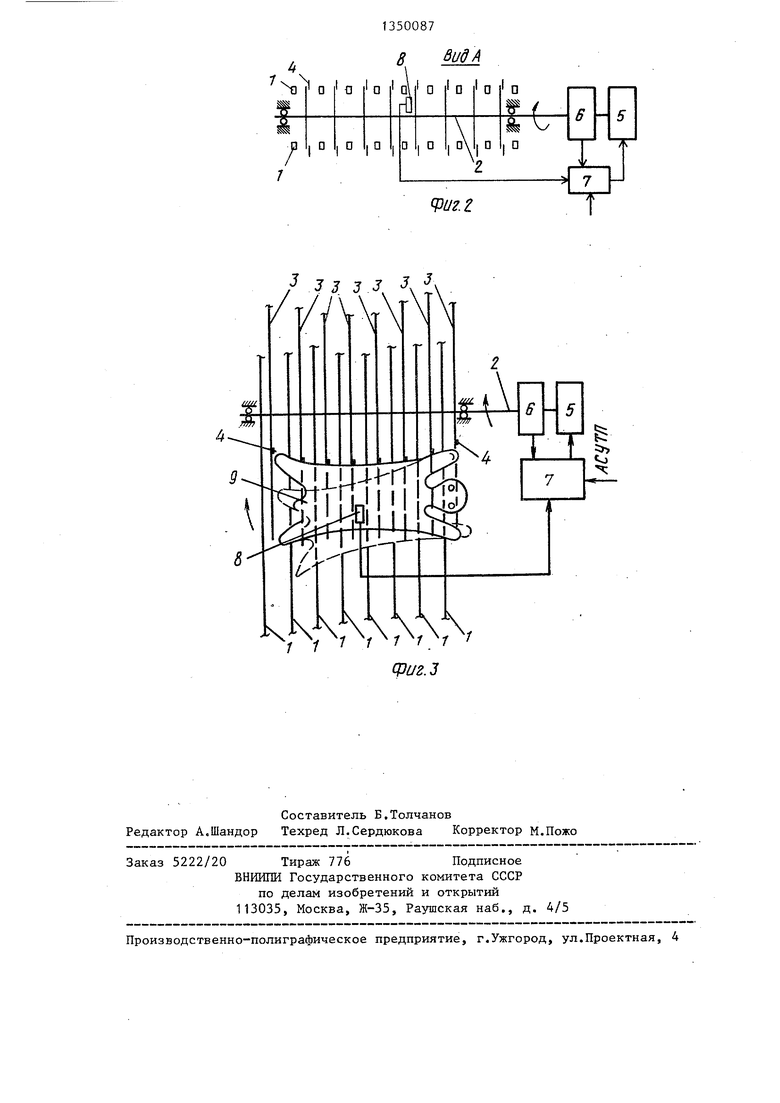
На фиг. 1 показан кантователь плоских предметов, общш вид; на фиг„ 2 - вид А на фиг. 1; на фиг. 3 расстановка упоров применительно для каракулевых шкурок.
Кантователь плоских предметов состоит из расположенного внутри грузо- несущих элементов транспортирующего органа 1 приводного вала 2 с поворотными двусторонними вильчатыми захватами 3 в виде двусторонней гребенки. Вал 2 установлен внутри транспортирующего органа поперек направления перемещения предметов с возможностью прохождения вильчатых захватов 3 между грузонесущими элементами 1. Захваты 3 изогнуты под углом 135-150°,причем точка изгиба делит длину каждой вилы в отношении 1:4, считая от точки ее крепления к оси. Такое техническое решение обеспечивает надежность переворота предмета.
На свободном конце вил в зоне перегиба захватов 3 смонтированы регулируемые упоры 4 с возможностью изменения своего положения вдоль вилы.
Вал 2 соединен с электроприводом 5 и снабжен блоком 6 конечных выключа
телей, формирующим, в зависимости
от угла поворота вала 2., сигналы для блока 7 управления электроприводом 5. Блок 7 управления обеспечивает движет ние вильчатых захватов 3 по программе и включается от автоматической системы управления(АСУТП) по обработ- ке каракулевых шкурок. Фотодатчик 8 наличия предмета 9 в зоне вильчатых захватов 3 выдает сигнал на запуск программы переворачивания предмета и соединен с входом блока 7 з/ правле- ния, выход которого подключен к.электроприводу 5.
Устройство работает следующим образом.
В исходном положении вильчатые захваты 3 находятся в положении I и не мешают продвижению шкурок транспортирующим органом, АСУТП по обра
ботке шкурок формирует последовательность (порядок) переворота шкурок и выдает сигнал на блок 7 управления. При поступлении сигнала от АСУТП на поворот очередной шкурки блок 7 включает электропривод 5, который поворачивает вал 2 с вильчатыми захватами 3 в положение II. Кантователь готов к работе. Переворачиваемый предмет 9 переносится грузонесущими элементами 1 до упоров 4. Упоры 4 устанавливаются на вилах 3 в положениях, определяемых формой переворачиваемого предмета 9 (фиг. 3). Если предмет 9 уложен на грузонесущие элементы с перекосом,: то, достигнув упоров 4, он примет заданное положение за счет доворота си-лами трения грузоне- сущего элемента 1 о предмет 9.
Фотодатчик 8 выдает на блок 7 управления сигнал о наличии предмета 9 для переворота и после паузы, необхо- ДИМОЙ для выравнивания предмета, блок 7 управления включает электропривод 5g который переводит захваты 3 в положение IIIU Каракулевая шкурка 9 по инерции опрокидывается на грузонесущие элементы 1 и переносится ими из зоны прохождения захватов 3. После вьщержки времени,на освобождение пространства для прохода вильчатых захватов 3, блок 7 управления включает электропривод 5 и вильчатые захваты возвращаются в положение I.
Кантователь находится в исходном состоянии
Формула изобре тения
1.Кантователь плоских предметов, включающий поворотные двусторонние вильчатые захваты, установленные на размещенном внутри грузонесущих элементов транспортирующего органа приводном валу с возможностью прохождения вил между грузонесущими элементами, отличающийся тем, что, с целью повышения надежности переворота плоских предметов, вилы поворотных двусторонних захватов выполнены изогнутыми под углом 135-150
и снабжены упорами, установленными на их свободном конце в зоне перегиба.
2,Кантователь по п. 1, отличающийся тем, что каждый упор установлен с возможностью изменения своего положения вдоль вилы.
8 идА
иг.г
сраг.з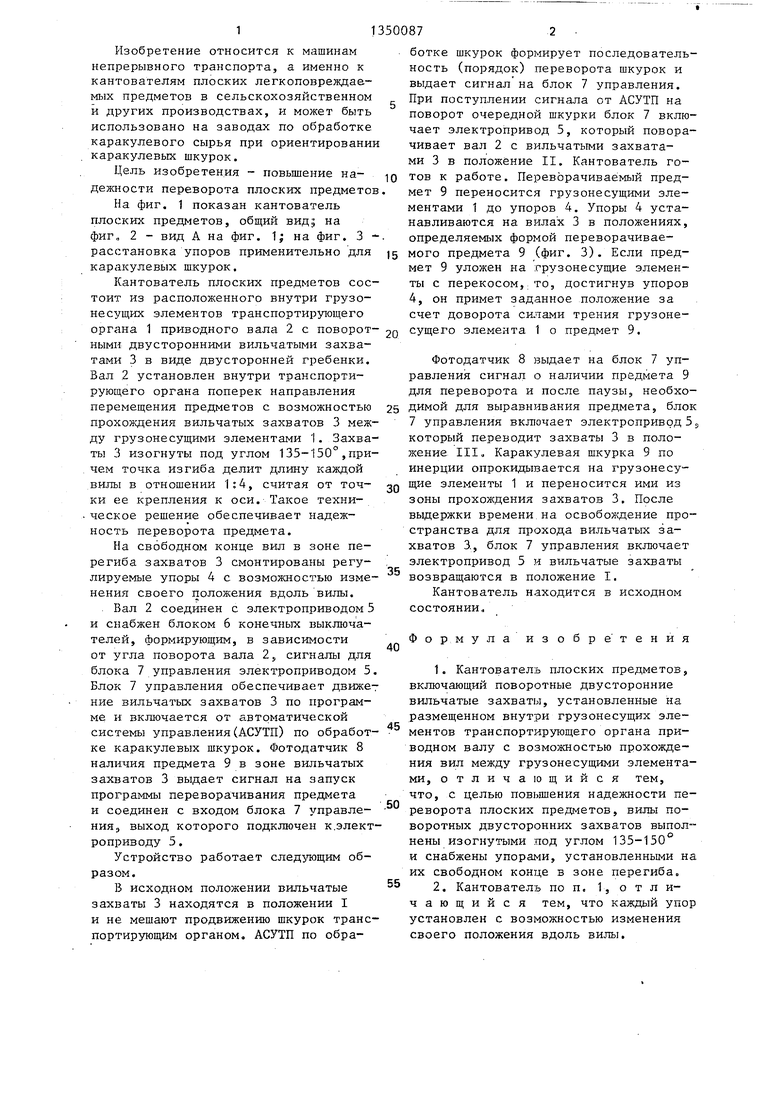
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации плоских предметов | 1984 |
|
SU1180328A1 |
| Способ сортировки каракулевых шкурок | 1987 |
|
SU1440564A1 |
| Поточная линия для производства дренажных раструбных труб | 1983 |
|
SU1079456A1 |
| Устройство для ориентации деталей | 1982 |
|
SU1013196A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Устройство для транспортирования изделий | 1987 |
|
SU1470628A1 |
| КАНТОВАТЕЛЬ | 1972 |
|
SU348353A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ И ПОДАЧИ ТЮКОВ ГРУЗА | 1991 |
|
RU2084389C1 |
| Устройство для счета семян | 1984 |
|
SU1180942A1 |
Изобретение относится к машинам непрерывного транспорта плоских легкоповрежденных предметов, например каракулевых шкурок (Ш), в с.-х. и других производствах. Цель изобретения - повьш1ение надежности переворота предметов. Для этого вилы (В) поворотных двусторонних захватов 3 изогнуты под углом 135 - 150. Точка изгиба делит длину каждой В от точки ее крепления к оси в отношении 1:4, На свободном конце В в зоне перегиба захватов 3 смонтированы регулируемые упоры 4 с возможностью изменения положения вдоль В. Захваты 3 установлены на размещенном внутри грузонесу- щих элементов 1 транспортирующего органа приводном валу 2 с возможностью прохождения В между элементами 1. Вал 2 соединен с электроприводом 5 и снабжен блоком 6 выключателей, который в зависимости от угла поворота вала 2 формирует сигналы для блока управления 7 электроприводом 5. Последний обеспечивает движение захватов 3 по программе и включается от автоматической системы управления, В зоне захватов 3 установлен фотодатчик 8 наличия Ш 9, При поступлении сигнала с автоматической системы управления на поворот Ш 9 блок 7 включает электропривод 5, поворачивающий вал 2 из исходного положения I в положение II, Элементами 1 Ш 9 переносится до упоров 4, Фотодатчик 8 выдает сигнал и блок 7 включает электропривод 5, переводящий захваты 3 в положение III. По инерции Ш 9 опроки- дашается на элементы 1 и переносится из зоны прохождения захватов 3, При включении электропривода 5 захваты 3 возвращаются в положение I, 1 з.п, ф-лы, 3 ил. & оз Oi о о 00 -1 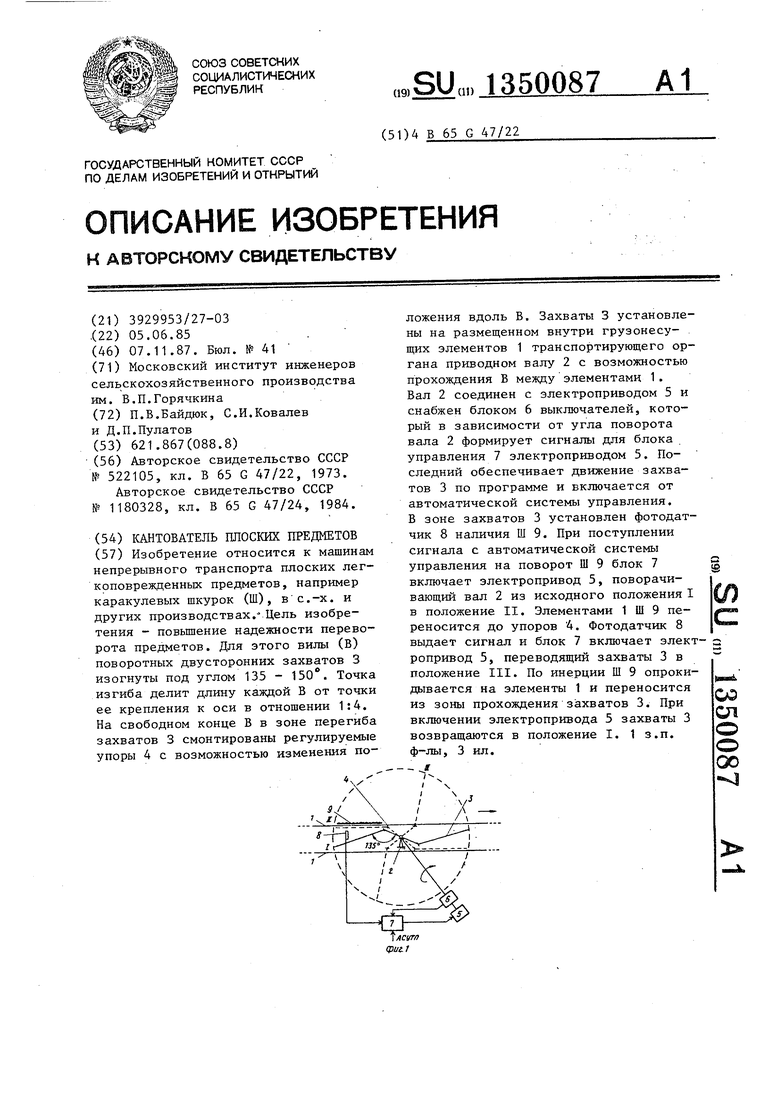
| Устройство для переворота шитовых изделий на конвейере | 1973 |
|
SU522105A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для ориентации плоских предметов | 1984 |
|
SU1180328A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
