Изобретение относится к области сельскохозяйственного производства и может быть использовано при обработке каракулевого сырья при ориентировании каракулевых шкурок, уложенных вручную после технологических оераций поперек транспортера и передаваемых на укладку, при которой шкурки должны быть уложены в стопу волос к волосу.
Целью изобретения является расширение области применения.
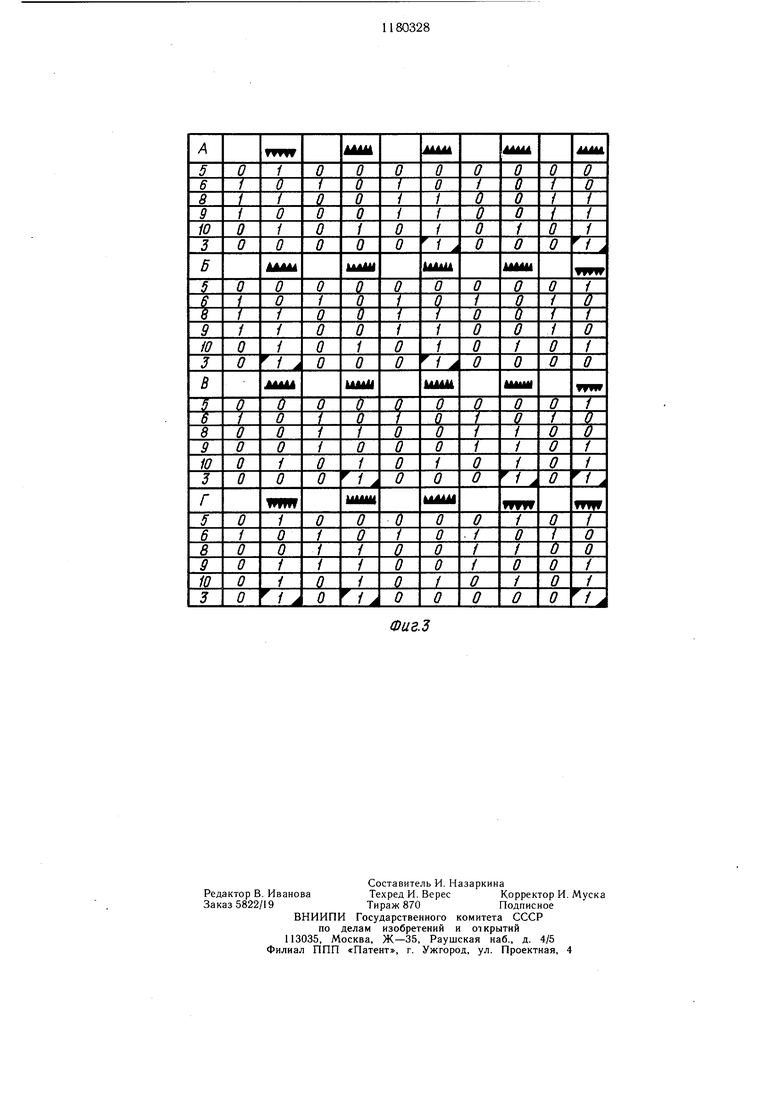
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - обозначения положения шкурки; на фиг. 3 - таблица истинности состояния выходов элементов схемы при различных положениях шкурки.
Устройство состоит из ременного транспортера 1, кантователя 2 шкурок, выполненного в виде врашающейся оси с вилами, исполнительного механизма 3, источника 4 света, датчиков положения 5 предмета и счета 6, инвертора 7, триггера 8, блока
9сложения по модулю два, коммутатора 10, счетчика 11. Датчик 5 положения предмета подключен к блоку сложения по модулю непосредственно, а датчик б счета - через счетный вход триггера 8. Одновременно сигнал с датчика 6 через инвертор поступает на счетное устройство 11 и на управляющий вход коммутатора 10. Выход блока 9 сложения по модулю через инвертор поступает на счетное устройство 11 и на управляюший вход коммутатора 10. Выход блока 9 сложения по модулю два через коммутатор
10соединен с исполнительным механизмом 3 кантователя 2. Датчик 5 положения предмета предназначен для оценки положения шкурки: волосом вверх - сигнал «О, мездрой вверх - «1. Датчик 6 контролирует наличие шкурки в зоне измерения и выдает укрепляющий сигнал на счетное устройство и коммутатор.
Устройство работает следующим образом. Рассмотрим последовательность положения А шкурок. При отсутствии шкурки датчик 5 положения предмета выдает сигнал «О, а датчик 6 счета - «1. Триггер 8 на прямом выходе выдает сигнал «1. На выходе блока 9 сложения по модулю два (0 и «1) дадут сигнал «1, но он не будет подан на исполнительный механизм, так как коммутатор заперт нулевым сигналом инвертора 7. Допустим, что шкурка 12, передвигаемая транспортером 1, лежит волосом вниз. В зоне контроля датчик 5 положения предмета выдает на выходе «1, а датчик счета б - «0«. Триггер 8 остается в предыдущем состоянии и на его выходе будет сигнал «1. Сложение по модулю двух единиц дает на выходе блока 9 сложения по модулю два сигнал «О. Одновременно инвертор 7 выдает сигнал на счетчик 11 и коммутатор 10. На входе исполнительного механизма будет сигнал «О и он не срабатывает. Дальнейшие переключения в схеме зависят от чередования шкурок и приведены в таблице истинности последовательности Б, В, Г.
Начальный порядок ориентирования шкурок определяется состоянием выхода триггера 8 и обеспечивает правильность ориентирования для всех возможных вариантов
их подачи т.е. триггер выполняет роль программирующего устройства. Причем, если в начальный момент задать на триггер выход «1, то первая шкурка будет подана волосом вниз (А и Б), а если «О, то волосом вверх (В и Г).
Использование предлагаемого устройства позволит повысить качество продукции на 5% и упростить ориентирование шкурок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь плоских предметов | 1985 |
|
SU1350087A1 |
| Способ сортировки каракулевых шкурок | 1987 |
|
SU1440564A1 |
| Способ сортировки каракулевых шкурок | 1990 |
|
SU1755957A2 |
| Устройство для сортировки плоских предметов | 1984 |
|
SU1189514A2 |
| Устройство для управления автоматом укладки кирпича | 1987 |
|
SU1560711A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Устройство управления манипулятором | 1984 |
|
SU1168898A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| Система автоматической сортировки проката | 1986 |
|
SU1395399A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПЛОСКИХ ПРЕДМЕТОВ, содержащее транспортер, датчики счета и положения предмета, источник света и исполнительный механизм, отличающееся тем, что, с целью расширения области применения, оно снабжено счетчиком, кантователем, инвертором, триггером, блоком сложения по модулю два и коммутатором, при этом датчик счета соединен с входом триггера непосредственно и через инвертор - со счетчиком и первым входом коммутатора, второй вход которого соединен с выходом блока сложения по модулю два, а выход - с исполнительным элементом, соединенным с кантователем, а датчик положения предмета соеди-нен с вторым входом блока сложения по модулю два. i (Л СХ) о 00 N5 СХ)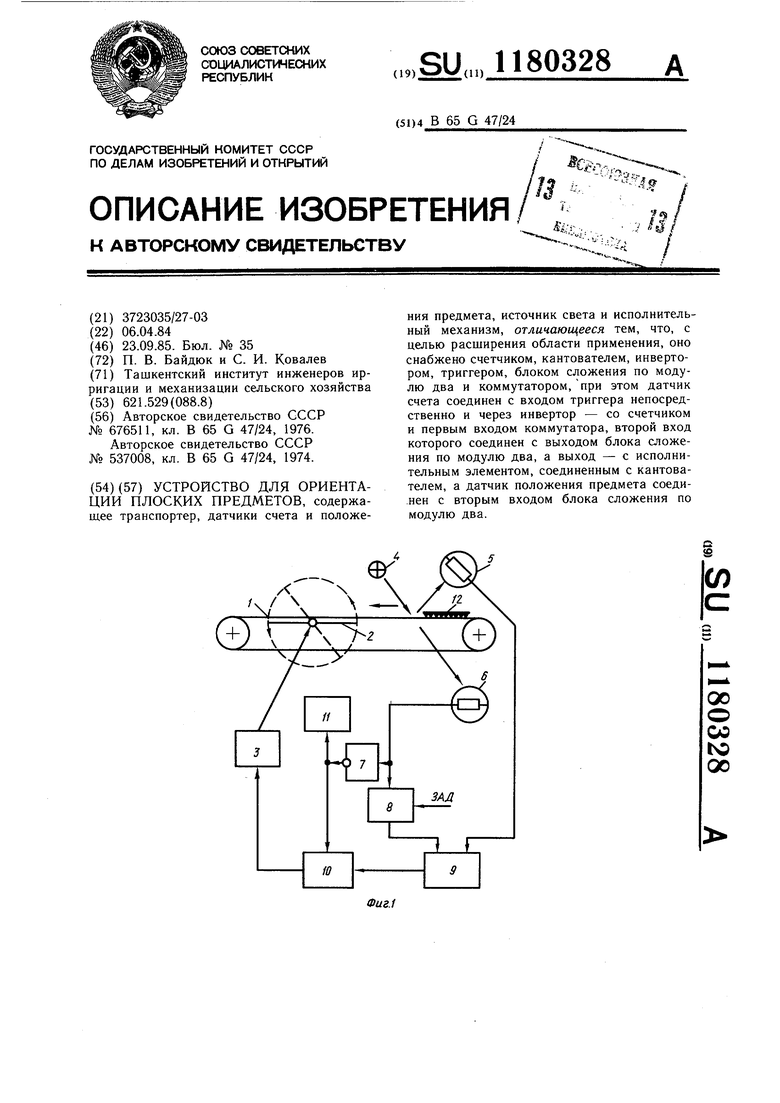
Мездр
Фиг.2
Фиг.З
| Устройство для управления непрерывной ориентацией разнотипных деталей | 1972 |
|
SU676511A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для ориентированной выдачи деталей | 1974 |
|
SU537008A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
