Изобретение относится к станкостроению, в частности к роторно-кон- вейерным линиям.
Цель изобретения - упрощение конструкции путем обеспечения возможности точного центрирования держателей в базовых пазах на рабочих позициях роторов при отсутствии натяжных устройств конвейера.
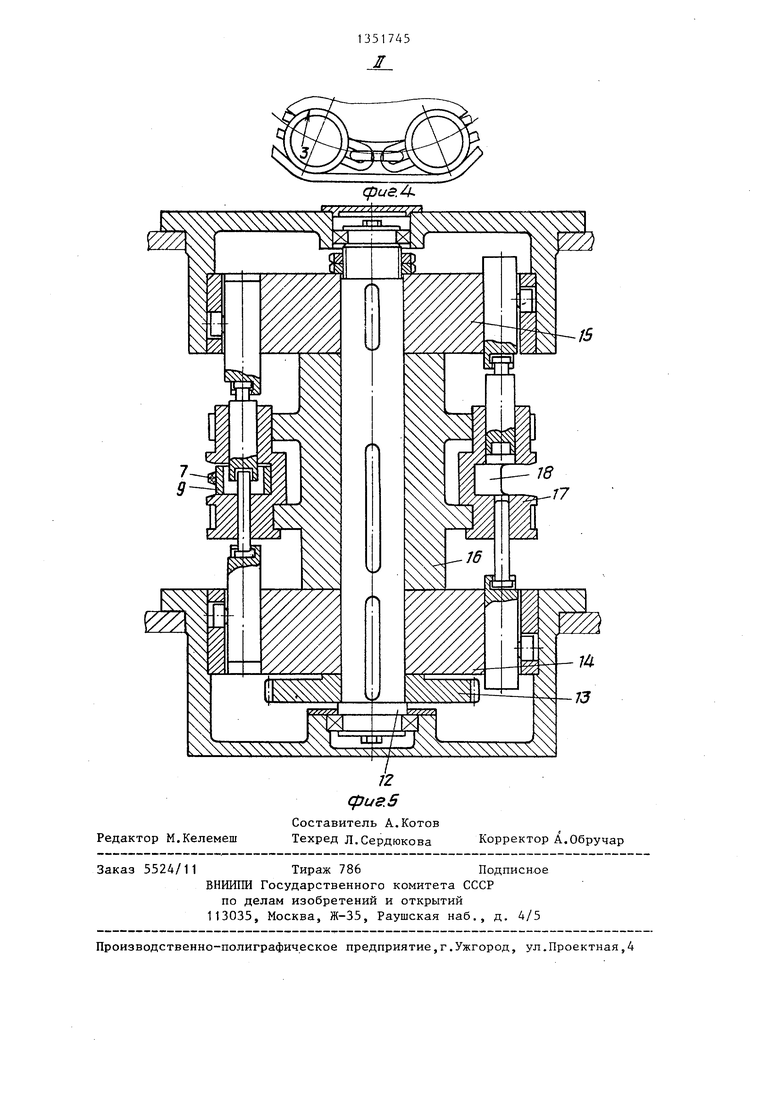
На фиг.1 изображена принципиаль- ная конструктивная схема линии, общий Bjjifl на фиг.2 - к.онвёйер в положении между роторами (узел I на фиг,1); на фиг.З - разрез А-А на фиг.2; на фиг.4 - конвейер при взаимодействии с ротором (узел.11 на фиг.1); на фиг..5 - ротор, оснащенный технологическими блоками.
Линия содержит рабочие роторы 1 и 2 (фиг.1) с базовыми пазами 3, которые определяют рабочие позиции ротора. Конвейер А огибает каждый ротор от входного направляющего ролика 5 до выходного направляющего ролика 6 о Гибкий ремень 7 огибает оба ролика 5 и 6, прижимает конвейер 4 к роторам 1 и 2. Натяжные ролики 8 обеспечивают натяжение ремня 7. Конвейер 4 содержит держатели 9, свя- занные звеньями 10,11 цепи с возможностью относительного перемещения.
На валу 12 (фиг.З) каждого ротора жестко насажены: шестерня 13, взаимодействующая с приводом (не показан)-, нижний барабан 14 и верхний барабан 15 для размещения необходи- мых механизмов , блокодержатель 16 дл крепления технологических блоков 17 с базовыми пазами 18.
о
Линия работает следующим обрдзом.
Роторы 1 и 2 /фиг.1) получают вр-а щение от привода через шестерню 13 (фиг.4).
Держатели 9 (фиг.1) захватываются пазами 3 рабочего ротора 1 или 2 и, оказываясь между ротором и входным направляющим роликом 5, фиксируются упругостью ремня 7 в пазах 3 ротора 1 и 2 (фиг.1,4). Далее при движении вместе с ротором каждый держатель 9, удерживаемый натяжением ремня, сохраняет фиксированное положение до выходного направляющего ролика 5, обеспечивая тем самым точность центрирования держателя 9 с базовым пазом 3 ротора. В случае оснащения ротора
блоками 17 (фиг.4) держатели 9 центрируются в блоке 17 пазом 18, Шаг конвейера в зоне взаимодействия конвейера с ротором становится равным шагу ротора. Таким образом, даже при
самой минимальной точности шага ротора каждый держатель будет точно сцентрирован с соответствующей позицией ротора,
Формула изобретения Роторно-конвейерная линия, содержащая роторы с базовыми пазами на рабочих,позициях, огибаемые конвейе- ром с несущими изделия или инструменты держателями, механизм центрирования держателей на рабочих позициях, отличающаяся тем, что, с целью упрощения конструкции, механизм центрирования держателей выполнен в виде бесконечных гибких приводных ремней, к.аждый из которых установлен рядом с ротором с возможностью огибания последнего и прижима держателей к базовым пазам, а каждый из элементов конвейера, соединяющих два соседних держателя, выполнен в виде звеньев цепи, связанных между собой с возможностью относительного перемещения, при этом крайние в связке звенья жестко связаны с держателями.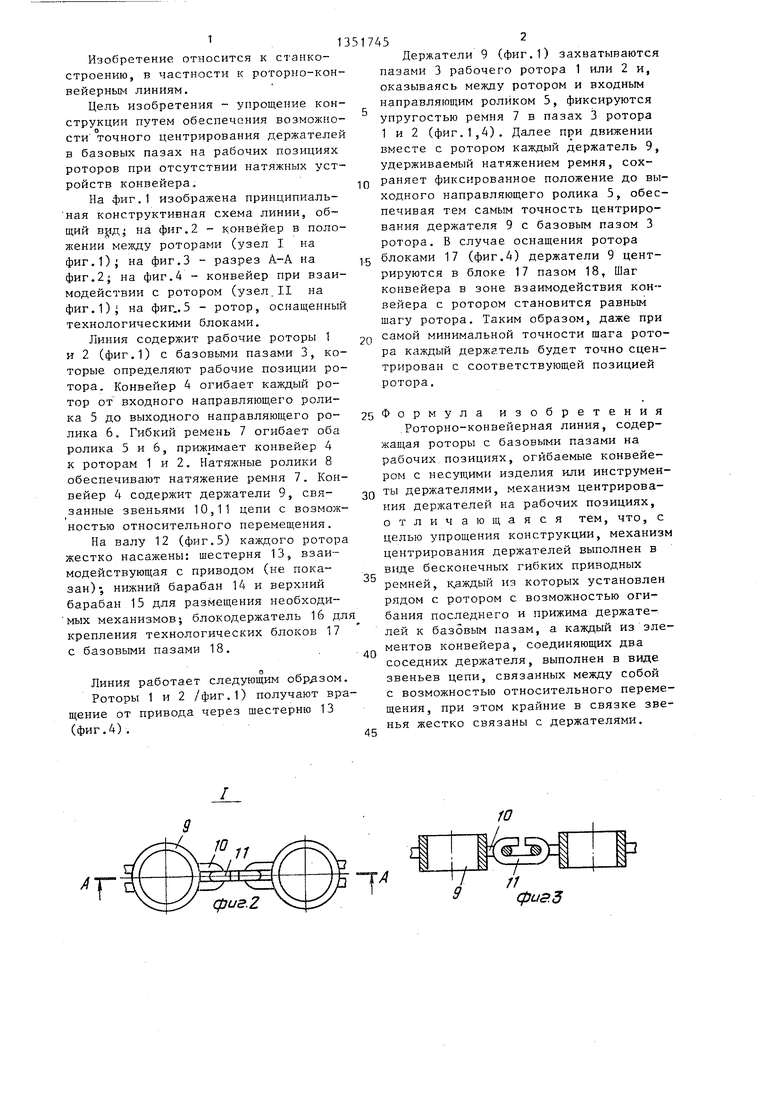
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная линия | 1989 |
|
SU1620272A1 |
| Транспортный ротор роторно-конвейерной машины | 1990 |
|
SU1740278A1 |
| Роторно-конвейерная линия | 1982 |
|
SU1027114A1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Роторно-конвейерная линия | 1988 |
|
SU1636187A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1972 |
|
SU419364A1 |
| Роторно-конвейерная машина для переработки реактопластов | 1980 |
|
SU870173A1 |
| Многопоточная рабочая машина непрерывного действия | 1977 |
|
SU732147A1 |
| Транспортирующее устройство роторно-конвейерной машины | 1982 |
|
SU1074777A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
Изобретение относится к станкостроению, в частности к роторно-кон- вейерным линиям. Цель изобретения - упрощение конструкции - обеспечивается возможностью точного центрирования держателей в базовых па:зах на рабочих позициях роторов при отсутствии натяжных устройств конвейера. Линия содержит роторы 1,2 с базовыми пазами 3. Конвейер 4 огибает кйж- дый ротор от входного направляющего ротора до выходного ролика 6. Гибкий ремень 7 каждого ротора прижимает держатели 9, связанные звеньями конвейера, к базовым пазам 3, тем самым .обеспечивая необходимую точность установки держателей 3 в рабочих позициях роторов 1,2. 5 ил. (Л оо сд N ел cpue,i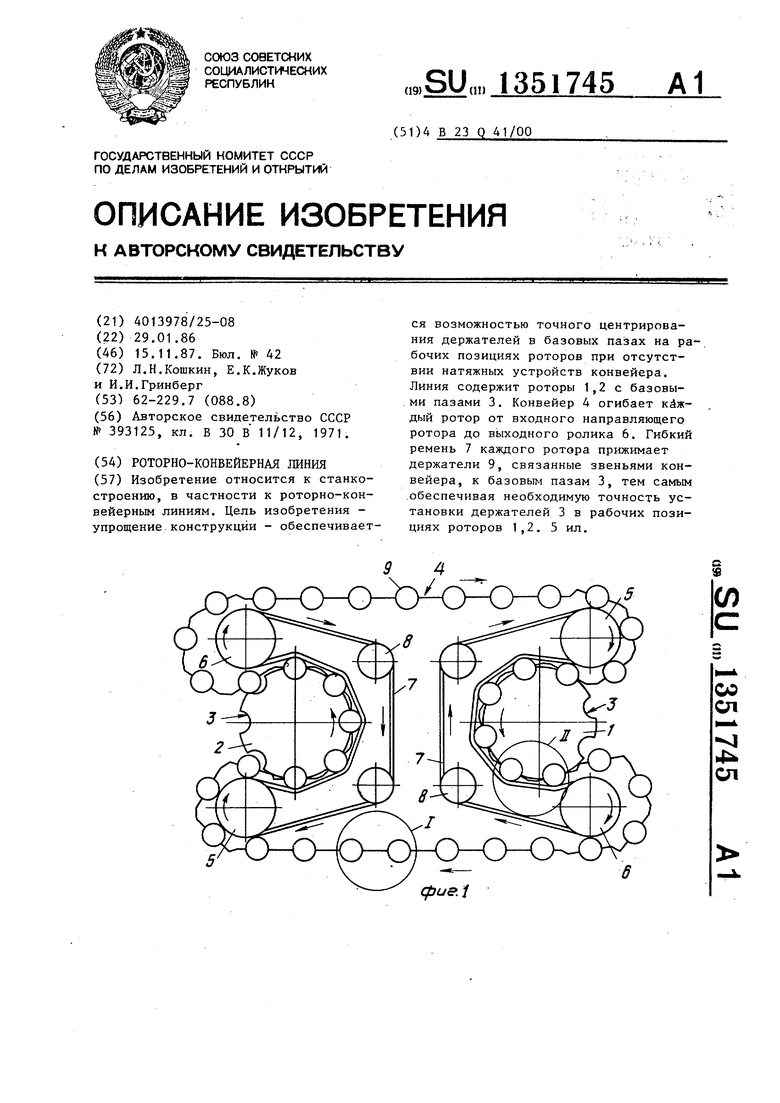
фиг.З
I
Редактор М.Келемеш
cpue.S
Составитель А.Котов
Техред Л.Сердюкова Корректор А.Обручар
Заказ 5524/11Тираж 786Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная,4
| 0 |
|
SU393125A1 | |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
