Изобретение относится к упаковочной технике, а именно к приводам прерывистого движения роторов и конвейеров упаковочных машин.
Целью изобретения является повышение надежности работы привода.
На чертеже изображена кинематическая схема привода прерывистого движения роторов и конвейеров упаковочных машин.
Привод содержит укрепленные в опорах ведущий вал 1 и ведомый вал 2 с жестко закрепленным на нем позиционным диском 3, имеюш.и.м пазы 4, и .механизмы поворота и фиксации позиционного диска 3. Каждый из механизмов поворота позиционного диска содержит четырехзвен- ный механизм, состоящий из закрепленного на ведущем валу I кривошипа 5, шатуна 6 и закрепленного на ведомом валу 2 коромысла 7, рычаг В шарнирно соединяющий коромысло 7 с камнем-ползуном 9, перемещающимся вместе с закрепленным на нем приводном сухарем 10 в направляющей 11, выполненной на двуплечем рычаге 12, на котором закреплен ролик 13, контактирующий с кулачком 14, установленным на ведущем валу 1 и взаимодействующим также с роликом 15, закрепленным на дополнительном рычаге 16, один конец которого щарнирно размещен на опоре, а другой шарнирно соединен со штоком пневмоцилиндра 17, шарнирно закрепленного на двуплечем рычаге 12. Каждый из механизмов фиксации позиционного диска 3 включает закрепленный на ведуще.м валу 1 кулачок 18, взаимодействующий с ролико.м 19, закрепленным на двуплечем рычаге 20, и роликом 21, за креп- ленпым на дополнительном рычаге 22, один конец которого закреплен на опоре, а другой щарнирно прикреплен к щтоку пневмоцилиндра 23, щарнирно закрепленного на двуплечем 20, па котором закреплен также фиксирующий сухарь 24.
Привод прерывистого движения обеспечивает равенство времени позиционного диска 3 и времени его выстоя и работает следующим образом.
Во время выстоя позиционного диска 3 равномерное вращение кривощипа 5 преобразуется через шатун 6 в качательпое движение коромысла 7 в направлении слева направо. Ролик 13 двуплечего рычага 12 в это время контактирует с участком вращающегося совместно с кривошипом 5 кулачка 14 с постоянным минимальным радиусом, а ролик 15 дополнительного рычага 16 обкатывается по участку кулачка 14 с постоянным максимальным радиусом.
В это время ролик 19 двуплечего рычага 20 находится на участке кулачка 18 с постоянным максимальным радиусом, а ролик 2 - на участке кулачка 18 с постоянным минимальным радиусом.
Фикснруюудий сухарь 24 при этом введен в паз 4 диска 3 и находится в неподвижном состоянии, а приводной сухарь 10 выведен из паза 4 позиционного диска. При подходе коромъюла 7 к крайнему право.му положению кулачок 14 толкает ролик 13, который переходит с участка с минимальным радиусом кулачка 14 на участок с максимальным радиусом, а ролик 15, поджимаемый к кулачку 14 с помощью дополнительного рычага 16 и пневмоцилиндра 17, синхронно с роликом 13 сходит по рабочему профилю кулачка 14 с участка с максимальным радиусом на участок кулачка 14 с минимальным радиусом.
5 Двуплечий рычаг 12 движется в это время против часовой стрелки, и приводной сухарь 10 входит в газ 4 позиционного диска 3. Кулачок 18 синхронно с кулачком 14 толкает ролик 21, поворачивая при этом дополнительный рычаг 22. и щар0 нирно соединенный с пневмоцилиндром 23 двуплечий рычаг 20, и фиксирующий сухарь 24 выходит из паза 4 позиционного диска 3.
В момент достижения коромыслом 7 край5 ijero правого положения фиксирующий сухарь 24 полностью выведен из паза 4, а сухарь 10 полностью введен в паз 4 позиционного диска 3.
Начинается движение коромысла 7 к его крайнему левому положению, а вместе с
Q ним посредством рычаги 8, камня-ползуна 9, перемещаюп егося в направляющей 11, и приводпого сухаря 10 вращается позиционный диск 3.
Ролик 13 в это время обкатывается по участку кулачка И. с постоянным мак5 си.ма. радиусом, а ролик 15 - по участку кулачка 14 с: постоянным мини- мальпы.м радиусо.м. Ролики 19 и 21 обкатываются по участкам кулачка 18 соответственно с минималь: ым и максимальным радиусами.
0 Постоянная кинематическая связь между кулачком 14 и роликами 13 и 15 обеспечивается и.ч постоянным поджатием к кулачку 14 с помощью пневмоцилиндра 17, 1ларнирпо соединяющего двуплечий рычаг 12 и дополнительный рычаг 16, а кинематическая связь кулачка 18 с роликами 19 и 21 осуществляется с помощью пневмоцилиндра 23, щарнирно соединяющего дополнительный рычаг 22 и двуплечий рычаг 20. При подходе коромысла 7 к крайнему
левому положепию кулачок 14 толкает ролик 15 и дополнительный рычаг 16 поворачивается по часовой стрелке, а вместе с ним поворачивается соединенный с пневмоцилиндром 17 двуплечий рычаг 12, отводя от позиционного диска 3 вместе
5 с камнем-ползуном 9 приводной сухарь 10.
Кулачок 18 при подходе коро.мысла 7
к крайнему левому положению толкает
ролик 19 и двуплечий рычаг 20, пово5
рачиваясь по часовой стрелке, вводит фиксирующий сухарь 24 в паз 4-диска 3. При достижении коромыслом 7 крайнего левого положения приводной сухарь 10 освобождает паз 4 диска 3, а фиксирующий сухарь 24 полностью введен в паз 4 и тем самым фиксирует положение позиционного диска 3. После этого коромысло 7 начинает свое движение к крайнему правому положению. В это время позиционный диск 3 находится в неподвижном состоянии. Во время работы привода порщни пневмоцилиндров 17 и 23 соверщают незначительные перемещения, обусловленные неточностью изготовления механизма и некоторой несинхронностью движения роликов.
Благодаря давлению на кулачки двух роликов, оси которых лежат в одной плоскости с осью вращения кулачков, крутящий момент на валу кулачков незначителен, так как моменты, создаваемые усилиями давления роликов, примерно равны по абсолютной величине и противоположны по направлению. В тоже время такой привод является беззазорным вследствие постоянного поджатия роликов к кулачкам, что устраняет один из основных источников снижения точности работы привода на высоких
0
скоростях и при значительных динамических нагрузках и вибрации в работе упаковочного автомата.
Формула изобретения
Привод прерывистого движения роторов и конвейеров упаковочных мащин, содержащий укрепленные в опорах ведущий вал и ведомый вал с закрепленными на нем позиционным диском, имеющим пазы, механизмы поворота и фиксации позиционного диска, каждый из которых содержит двуплечий рычаг с закрепленным на нем роликом, и кулачок, закрепленный на
5 ведущем валу, отличающийся тем, что, с целью повыщения надежности работы, каждый из механизмов поворота и фиксации позиционного диска снабжен пневмоцилинд- ром и дополнительным укрепленным одним концом на опоре рычагом с роликом для взаимодействия с кулачком, причем пневмо- каждого .механиз.ма шарнирно закреплен на конце двуплечего рычага, а каждый из дополнительных рычагов шарнирно прикреплен к щтоку пневмоцилиндра, при
5 этом оси роликов каждого механизма расположены в одной плоскости с осью кулачка.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Станок для закатки и отбортовки изделий | 1984 |
|
SU1250354A1 |
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
Изобретение относится к упаковочной технике и может быть использовано в пищевой и химической отраслях промышленности и направлено на повышение надежности в работе. Привод содержит ведущий 1 и ведомый 2 валы, позиционный диск 3 с пазами 4, механизм периодического поворота диска, содержащий кривошип 5, шатун 6, коромысло 7, рычаг 8, шарнирно соединяющий коромысло 7 с камнем-ползуном 9, приводной сухарь 10, направляющую II камня-ползуна, выполненную на двуплечем рычаге 12 с укрепленным на нем роликом 13, взаимодействующим с кулачком 14, дополнительный рычаг 16 с роликом 15 и шарнирно прикрепленный к двуплече.му рычагу 12 пневмоцилиндр 17, шток которого щарнирно соединен с дополнительным рычагом 16, механизм фиксации позиционного диска, содержащий двуплечий рычаг 20 с закрепленным на нем ролико.м 19, взаимо- действующи.м с кулачко.м 18, фиксирующий сухарь 24, дополнительный рычаг 22 с закрепленным на нем роликом 21 и щарнирно соединенный с двуплечим рычагом 20 пневмоцилиндр 23. шток которого щарнирно прикреплен к дополнительному .рычагу 22. Конструкция привода обеспечивает замыкание двуплечих рычагов фиксирующего и приводного сухарей на кулачки с по.мощью дополнительных рычагов, ролики которых контактируют с этими же кулачками и прижимаются к ним за счет дополнительно введенных пневмоцилиндров. Привод является беззазорным, что устраняет один из основных источников снижения точности работы привода на высоких скоростях и значительных динамических нагрузках. А это повышает надежность привода. 1 ил. (Л со ел со О5 СО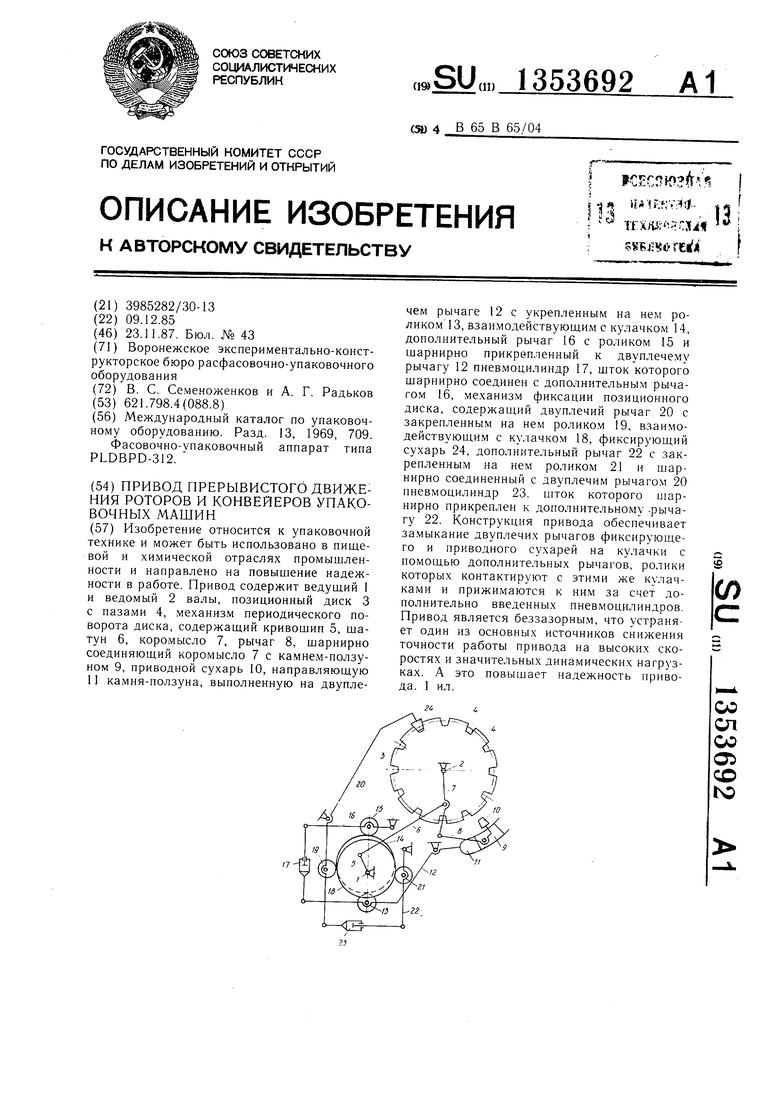
| Международный каталог по упаковочному оборудованию | |||
| Разд | |||
| Насос | 1917 |
|
SU13A1 |
| Способ обработки шкур | 1921 |
|
SU312A1 |
