Изобретение относится к технике, механизируюо ;ей разгрузку конвейеров, транспортеров, бревнотасок и др
6
Цель изобретения -- увеличение производительности работы сбрасывателя.
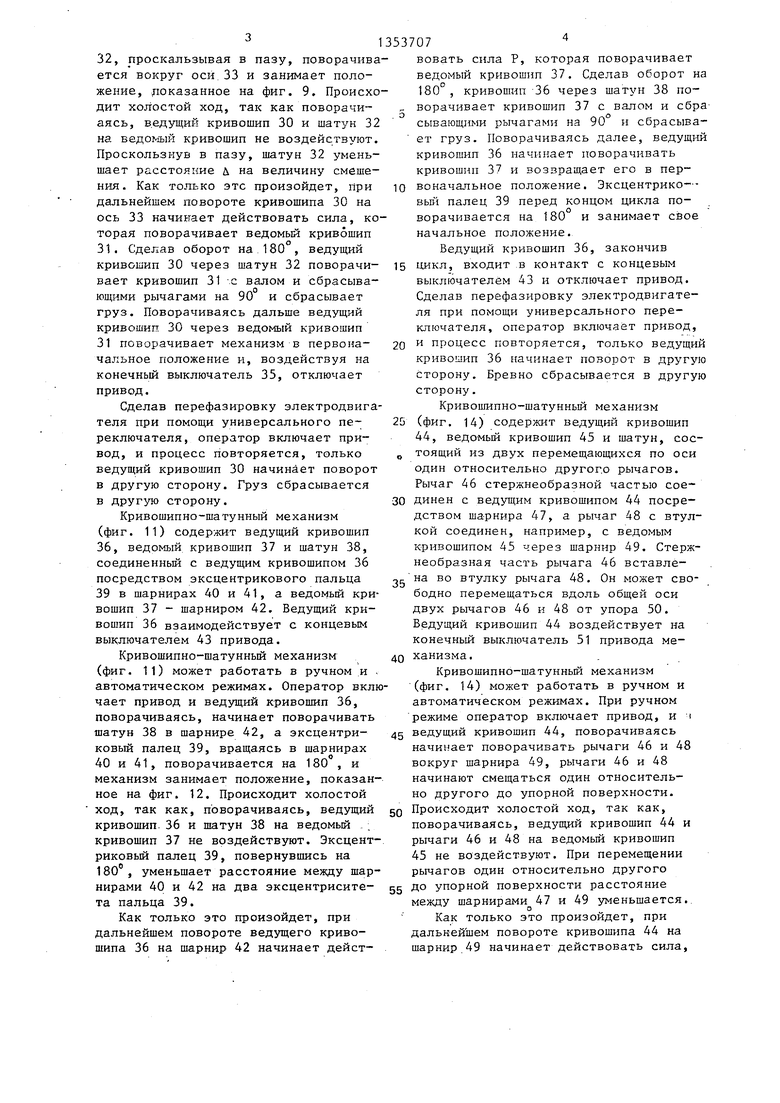
На фиг, 1 изображен сбрасыватель груза; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг, 1 (нейтральное положение); на фиг , 4 - то же, при сталкивании влево.; на фиг, 5 - кривошипно-шатунный механизм, выполненный из двух секций с ограничителями поворота, нейтральное „положение; на фиг. 6 - то же,, при повороте в конце холостого хода; на фиг. 7 - то же, при повороте на
180
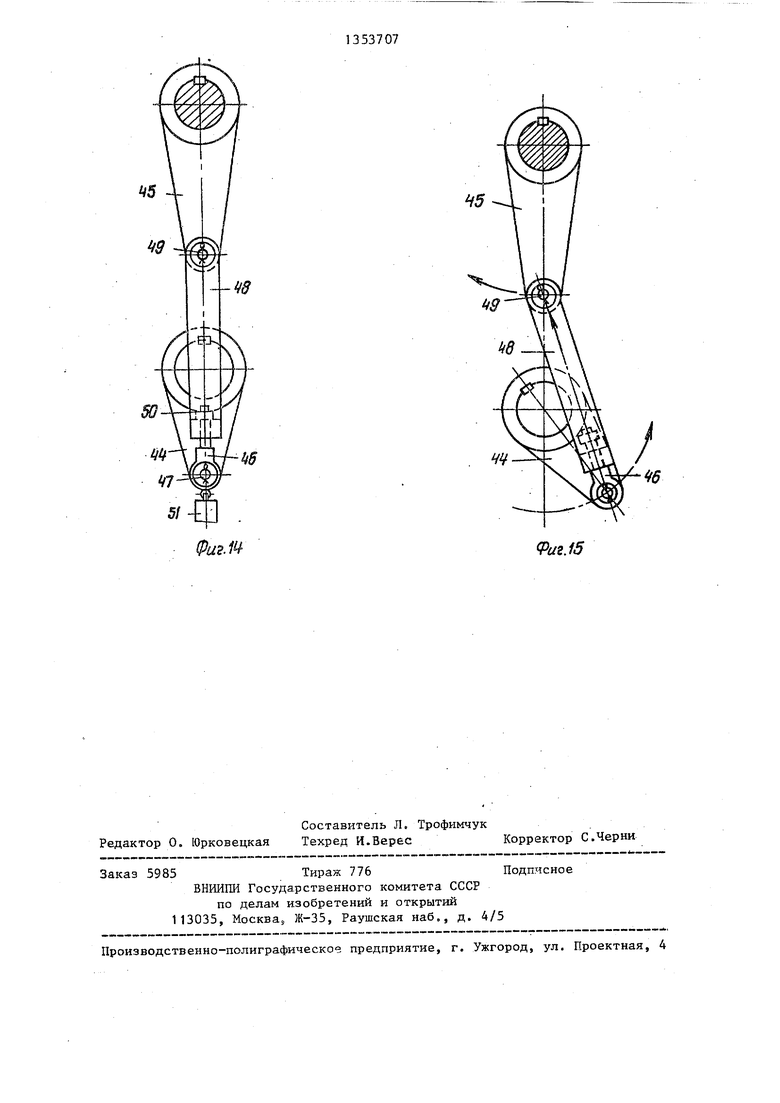
на фиг. 8 - кривошипно-шатунный механизм, в котором кривошип и шатун соединены посредством паза, Нейтральное положение; на фиг. 9 - то же, при повороте в конце холостого хода; на фиг. 10 - то же при повороте на 180°; на фиг. 11 - кривошипно-шатунный механизм, в котором кривошип и шатун соединены посредством эксцентрикового пальца, нейтральное положение; на фиг, 12 - то же, при повороте в конце холостого хода; на фиг. 13 - то же 5 при повороте на 180 ; на фиг 14 - кривошишго-литун- ный механизм с раздвижным шатуном, нейтральное положение; па фиго 15 -- то же, при повороте в конце холостог хода „
Сбрасыватель груза содержат раму 1, на которой установлен привод, имеющий электродвигатель 2, редуктор 3, колодочный тормоз 4 и стойки с подшипниковыми опорами 5-7,.в которых установлены валы 8 и 9 со сбрасывающими рычагами 10-12, соединенные муфтой 13, валы 8 и 9 соединены с приводом через кривошипно-шатунный механизм 14, Сбрасываюш ий рычаг 11 для изменения расстояния между рычагами 11 и 10, 11 и 12 выполнен с возможностью перемеш,ения по вгшу 9. Для этой цели ступица 15 сбрасывающего рычага 11 имеет два резьбовых элемента 16 и 17 с контргайками.
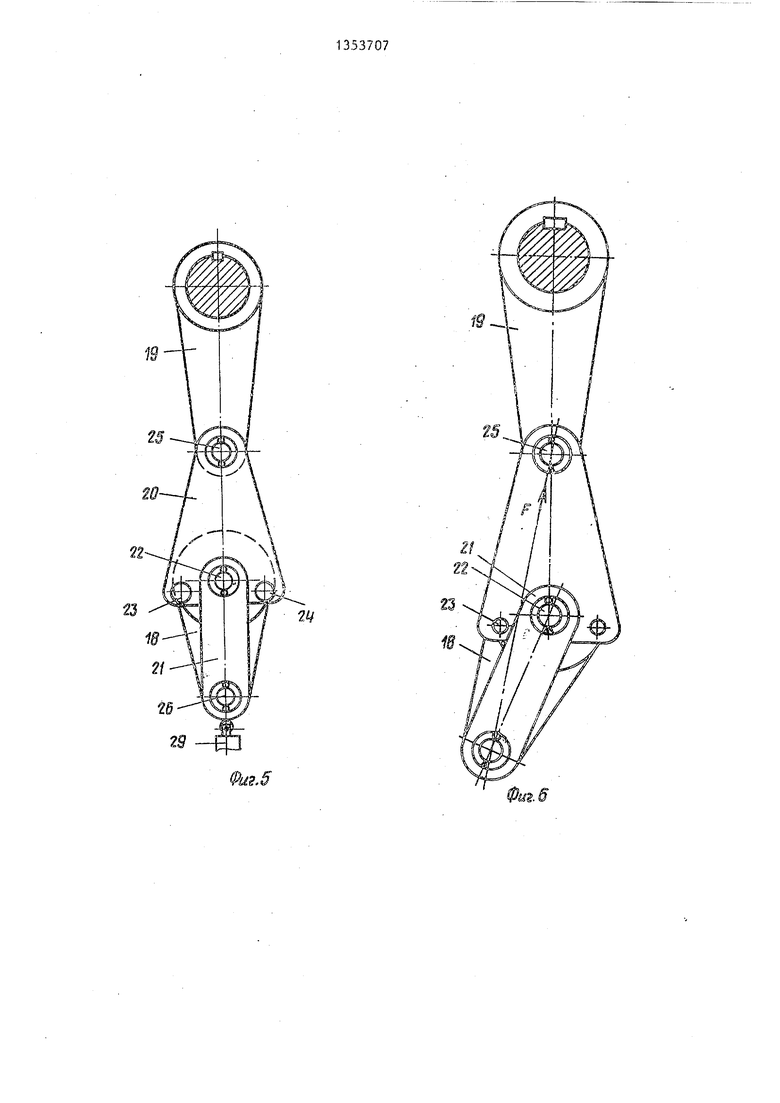
Крнвошипно-шатунный механизм 14 (фиг. 5-7) содержит ведущшЧ 18 и ве- .домый 19 кривошипы, каждый из которы состоит из двух секций 20 и 21, соединенных шарнирами 22, причем секция 20 включает упоры 23 и 24. Ведутдий и ведомый кривошипы 18 и 19 соединены посредством шарниров 25 и 26,
Сбрасыватель груза работает следующим образом.
Перемещающееся по бревнотаске 27 бревно 28, отклорп в флажок, связанный с концевыг- выключателем, отключает привод бревнотаски 27. Бревно 28 останавливается над сбрасывателем. Оператором включается привод сбрасывателя 5 и ТИХОХОДНЫ вал редуктора 3, поворачиваясь, начинает поворачивать кривошип 18, а он, в свою очередь, поворачивает секц)-по 21 в шарнире 22 до контакта С упором 23. Происходит
холостой ход, так как поворачиваясь, ведуЕтий кривошип 18 поворачивает секцию 21, а не, ведомьй кривошип 19. Дойдя до упора 23, секция 21 меняет расстояние между шарнирами 25 и 26.
Как только это произойдет, на шарнир
25 начинает действовать сила
Р, F, 19.
которая новора швает кривошип
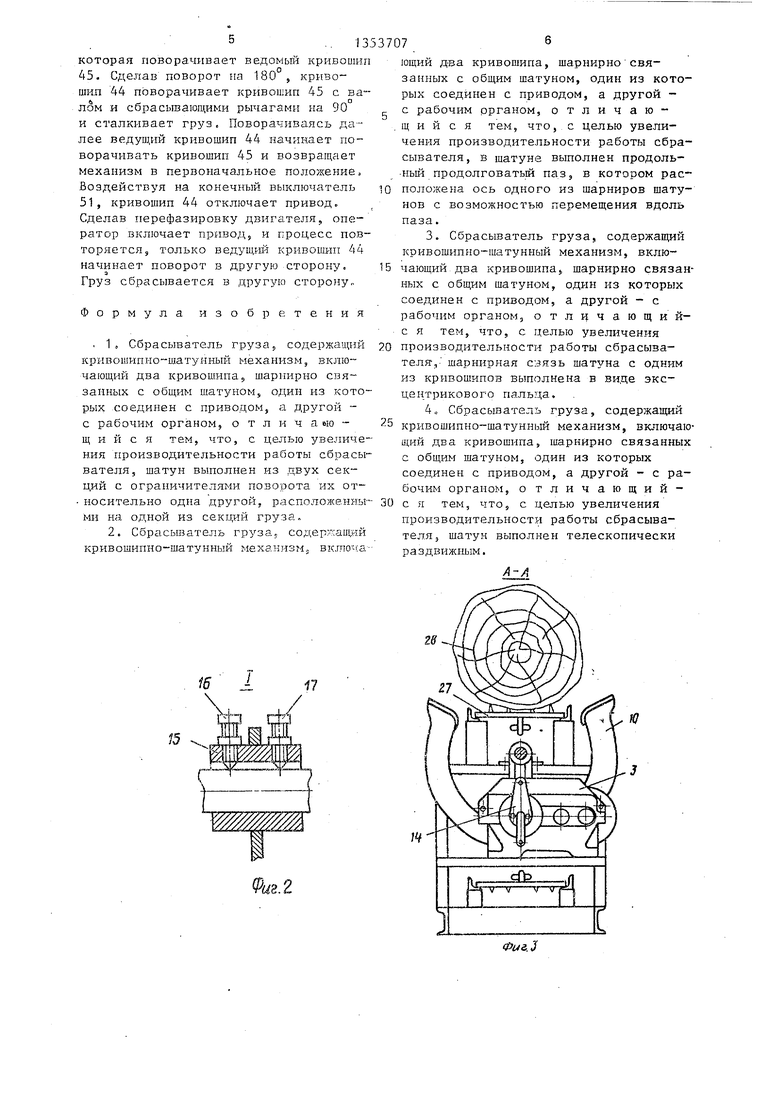
Сделав оборот на 180 , кривошип 18 поворачивает кривошип 19 и валы 8 и 9 со сбрасываюпщми. рылагами 10-12. на 90 , и бревно 28.сбрасывается с
0
0
бревнотаски (фиг, 4). Доворачиваясь дальше, кривошип 18 поворачивает валы 8 и 9 с рычагами 10-12 в обратном направлении на 90. Сам ведущий кривошип 18 поворачивается на, 180° и, воздействуя на концевой выключатель 29; отключает привод сбрасывателя и приводит кривошипно-шатунный механизм в нейтральное положение (фиг. 5). Для того, чтобгл столкнуть бревно 28 в другую сторону, оператор осуществляет перефазировку электродвигателя 2 и включает привод. Процесс повторяется, только кривошип 18 начинает поворот в другую сторону. При автоматическом режиме работы сброс -груза осуществляется по определенной схеме, например вправо-влево 1гпи два
,раза вправо, один раз влево.
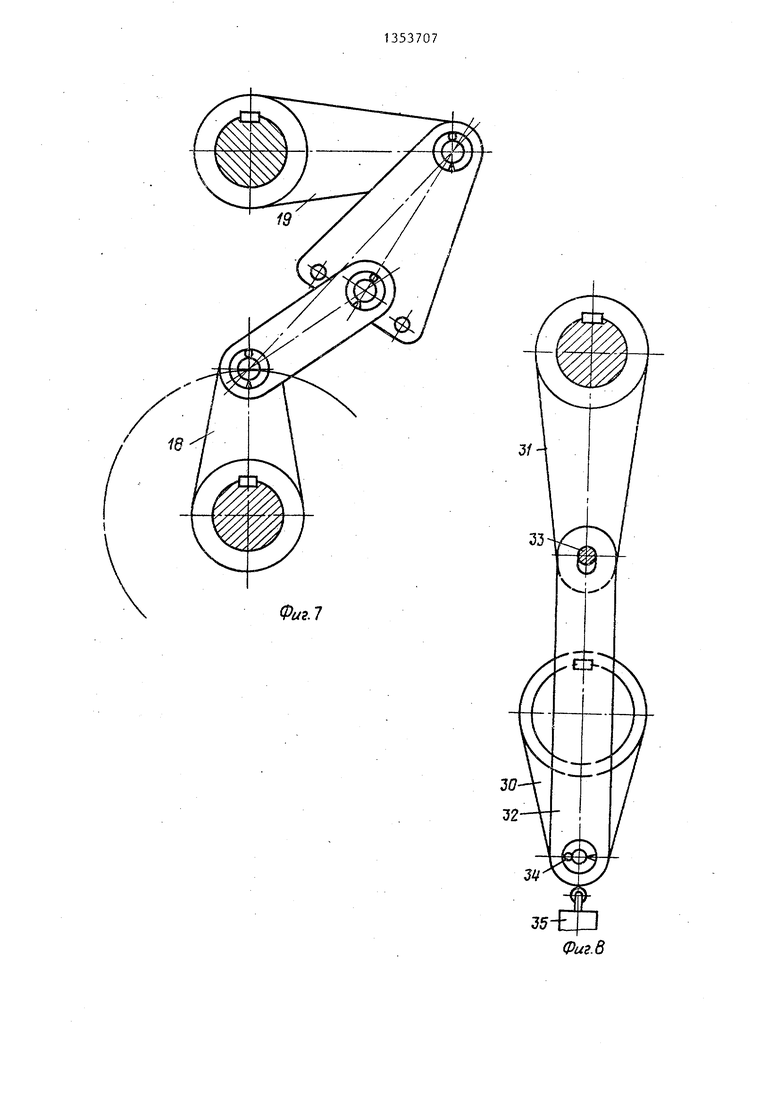
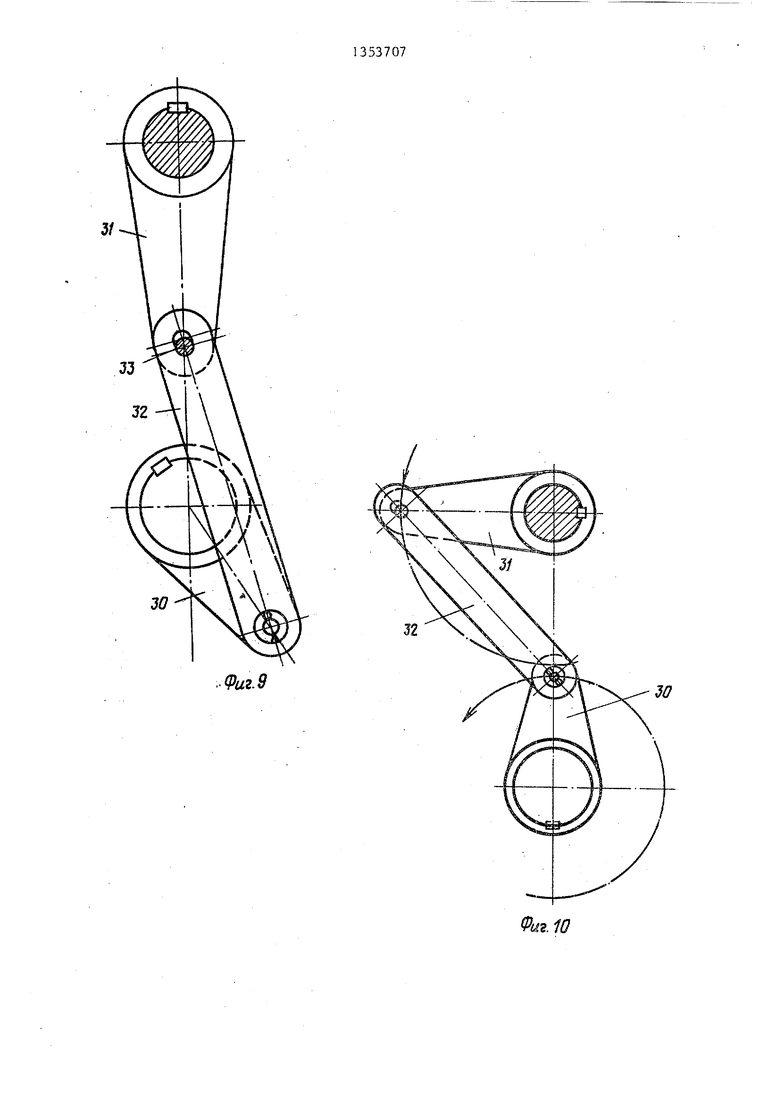
Кривошипно-шатунный механизм (фиг. 8) содержит ведущий кривошип 30, ведомьш кривоглип 31 и шатун 32, соединенные посредством оси 33 и паg sa. Ведущий кривошип 30 соединен с . шатуном 32 посредством шарнира 34 и входит в ко 1такт с конечньЕМ выключателем 35.
Кривошипно-шатунный механизм (фиг. 8) работает в ручном или автоматическом режиме. Оператор включает привод и ведуш:ий кривош1Ш 30, поворачиваясь, начинает поворачивать шатун 32 вокруг оси 33. В это время шатун
5
32, проскальзывая в пазу, поворачивается вокруг оси 33 и занимает положение, доказанное на фиг. 9. Происхо- 180 , кривошип 36 через шатун 38 по- дит холостой ход, так как поворачи- аясь, ведущий кривошип 30 и шатун 32 на ведомый кривошип не воздействуют. Проскользнув в пазу, шатун 32 уменьшает расстояние д на величину смешения. Как только это произойдет, при дальнейшем повороте кривошипа 30 на ось 33 начинает действовать сила, которая поворачивает ведомьй кривошип 31. Сделав оборот на 180 , ведущий кривошип 30 через шатун 32 поворачивает кривошип 31 с валом и сбрасывающими рычагами на 90 и сбрасывает груз. Поворачиваясь дальше ведущий кривошип 30 через ведомый кривошип 31 поворачивает механизм в первоначальное положение и, воздействуя на конечный выключатель 35, отключает привод.
Сделав перефазировку электродвигателя при помощи универсального переключателя, оператор включает привод, и процесс повторяется, только ведущий кривошип 30 начинает поворот в другую сторону. Груз сбрасывается в другую сторону.
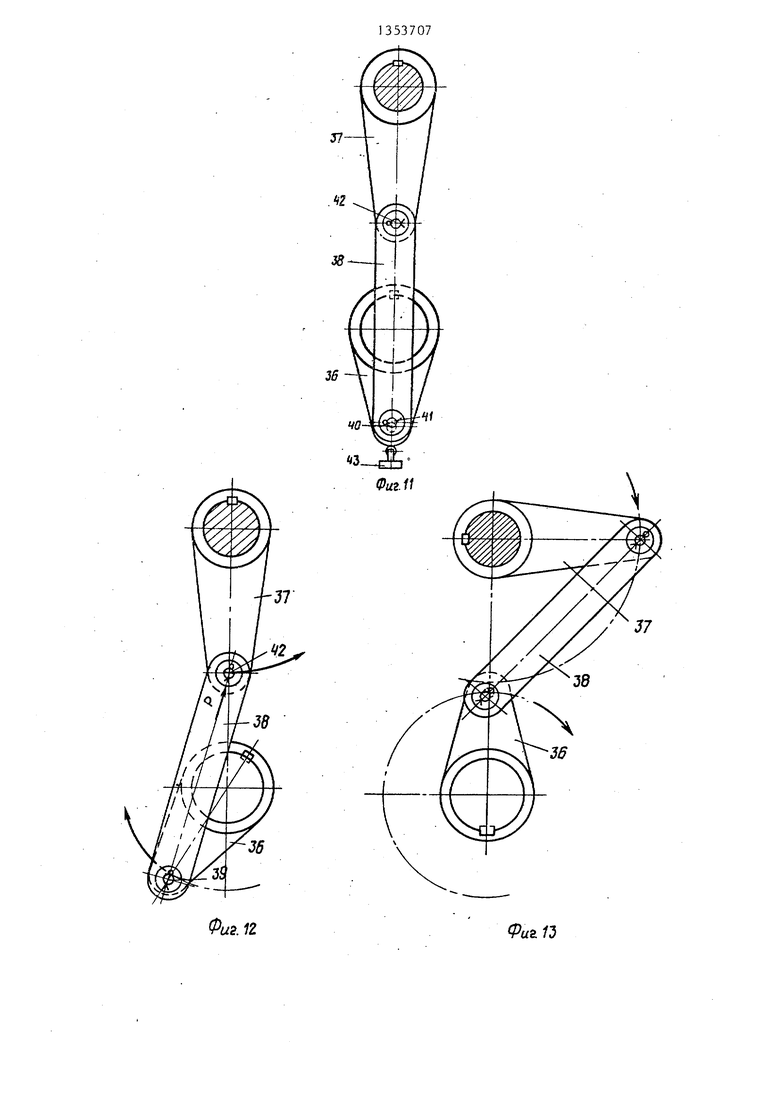
Кривошипно-шатунный механизм (фиг. 11) содержит ведущий кривошип 36, ведомый кривошип 37 и шатун 38, соединенный с ведущим кривошипом 36 посредством эксцентрикового пальца
39в шарнирах 40 и 41, а ведомый кривошип 37 - шарниром 42. Ведущий кривошип 36 взаимодействует с концевым выключателем 43 привода.
Кривошипно-шатунный механизм (фиг. 11) может работать в ручном и - автоматическом режимах. Оператор включает привод и ведущий кривошип 36, поворачиваясь, начинает поворачивать шатун 38 в шарнире 42, а эксцентриковый палец 39, вращаясь в шарнирах
40и 41, поворачивается на 180 , и
ворачивает кривошип 37 с валом и сбра сывающими рычагами на 90 и сбрасыва- ет груз. Поворачиваясь далее, ведущий кривошип 36 начинает поворачивать кривошип 37 и возвращает его в пер- 10 воначальное положение. Эксцентрико-- вый палец 39 перед концом цикла поворачивается на 180 и занимает свое начальное положение.
Ведущий кривошип 36, закончив 15 цикл, входит в контакт с концевым выключателем 43 и отключает привод. Сделав перефазировку электродвигателя при помощи универсального переключателя, оператор включает привод, 2Q и процесс повторяется, только ведущий кривошип 36 начинает поворот в другую сторону. Бревно сбрасывается в другую сторону.
Кривошипно-шатунный механизм 2Q (фиг. 14) содержит ведущий кривошип
44, ведомый кривошип 45 и шатун, сос- „ тоящий из двух перемещающихся по оси один относительно другого рычагов. Рычаг 46 стержнеобразной частью сое- 30 динен с ведущим кривошипом 44 посредством шарнира 47, а рычаг 48 с втулкой соединен, например, с ведомым кривошипом 45 через шарнир 49. Стерж- необразная часть рычага 46 вставлё- Tg на во втулку рычага 48. Он может свободно перемещаться вдоль общей оси двух рычагов 46 и 48 от упора 50. Ведущий кривошип 44 воздействует на конечный выключатель 51 привода ме- 40 ханизма.
Кривошипно-шатунньй механизм (фиг. 14) может работать в ручном и автоматическом режимах. При ручном режиме оператор включает привод, и i 45 ведущий кривошип 44, поворачиваясь начинает поворачивать рычаги 46 и 48 вокруг шарнира 49, рычаги 46 и 48 начинают смещаться один относительно другого до упорной поверхности. Происходит холостой ход, так как, поворачиваясь, ведугций кривошип 44 и рычаги 46 и 48 на ведомый кривошип 45 не воздействуют. При перемещении рычагов один относительно другого
механизм занимает положение, показанное на фиг. 12. Происходит холостой ход, так как, поворачиваясь, ведущий кривошип. 36 и шатун 38 на ведомый : кривошип 37 не воздействуют. Эксцент- риковьм палец 39, повернувшись на
-lO
180°
уменьшает расстояние между шар
нирами 40 и 42 на два эксцентрисите- 55 Д° упорной поверхности расстояние
та пальца 39.
Как только это произойдет, при дальнейшем повороте ведущего кривошипа 36 на шарнир 42 начинает дейстмежду шарнирами 47 и 49 уменьшает
о Как только это произойдет, при
дальнейшем повороте кривошипа 44 н шарнир 49 начинает действовать сил
вовать сила Р, которая поворачивает ведомый кривошип 37. Сделав оборот на
180 , кривошип 36 через шатун 38 по-
ворачивает кривошип 37 с валом и сбрасывающими рычагами на 90 и сбрасыва- ет груз. Поворачиваясь далее, ведущий кривошип 36 начинает поворачивать кривошип 37 и возвращает его в пер- 0 воначальное положение. Эксцентрико-- вый палец 39 перед концом цикла поворачивается на 180 и занимает свое начальное положение.
Ведущий кривошип 36, закончив 5 цикл, входит в контакт с концевым выключателем 43 и отключает привод. Сделав перефазировку электродвигателя при помощи универсального переключателя, оператор включает привод, Q и процесс повторяется, только ведущий кривошип 36 начинает поворот в другую сторону. Бревно сбрасывается в другую сторону.
Кривошипно-шатунный механизм Q (фиг. 14) содержит ведущий кривошип
44, ведомый кривошип 45 и шатун, сос- тоящий из двух перемещающихся по оси один относительно другого рычагов. Рычаг 46 стержнеобразной частью сое- 0 динен с ведущим кривошипом 44 посредством шарнира 47, а рычаг 48 с втулкой соединен, например, с ведомым кривошипом 45 через шарнир 49. Стерж- необразная часть рычага 46 вставлё- g на во втулку рычага 48. Он может свободно перемещаться вдоль общей оси двух рычагов 46 и 48 от упора 50. Ведущий кривошип 44 воздействует на конечный выключатель 51 привода ме- 0 ханизма.
Кривошипно-шатунньй механизм (фиг. 14) может работать в ручном и автоматическом режимах. При ручном режиме оператор включает привод, и i 5 ведущий кривошип 44, поворачиваясь начинает поворачивать рычаги 46 и 48 вокруг шарнира 49, рычаги 46 и 48 начинают смещаться один относительно другого до упорной поверхности. Происходит холостой ход, так как, поворачиваясь, ведугций кривошип 44 и рычаги 46 и 48 на ведомый кривошип 45 не воздействуют. При перемещении рычагов один относительно другого
Д° упорной поверхности расстояние
между шарнирами 47 и 49 уменьшается.
о Как только это произойдет, при
дальнейшем повороте кривошипа 44 на шарнир 49 начинает действовать сила.
которая поворачивает ведомый кривоишп 45. Сделав поворот па 180°, кривошип 44 поворачивает кривошип 45 с валом и сбрасывающими рычагами на 90° и сталкивает груз, Поворачиваясь далее ведущий кривошип 44 начинает поворачивать кривошип 45 и возвращает механизм в первоначальное положение. Воздействуя на конечный выкл ог атель 51, кривошип 44 отключает привод Сделав перефазировку двигателя, оператор включает привод, и процесс повторяется, только ведущий кривошип 44 начинает поворот в дpyгyFJ сторону. Груз сбрасывается в другую сторону..
Формула изобретения
. 1, Сбрасыватель груза, содержащий кривошипно-шатунный механизм, включающий два кривошипа, шарпирно связанных с общим шатуном, один из которых соединен с приводом, а другой с рабочим органом, отличав- щ и и с я тем, что, с делью увеличе-- Н.ИЯ производительности работы сбрасывателя, шатун выполнен из двух секций с ограничителями поворота их от- носительно одна другой, расположенными на одной из секций груза.
2. Сбрасыватель груза, содерхсаишй кривошипно-шатунный механизм, вклю са37076
ющий два кривошипа, шарнирно связанных с общим шатуном, один из которых соединен с приводом, а другой g с рабочим органом, отличаю- . щ и и с я тем, что, с целью увеличения производительности работы сбрасывателя, в шатуне выполнен продоль- -ный продолговатьм паз, в котором положена ось одного из шарниров шатунов с возможностью перемещения вдоль паза.
3, Сбрасыватель груза, содержащий кривошипно-шатунный механизм, вклю15 чающий два кривошипа5 шарнирно связанных с общим шатуном, один из которых соединен с приводом, а другой - с рабочим органом, отличающийся тем, что, с целью увеличения
20 производительности работы сбрасывателя, шарнирная с;зязь шатуна с одним из кривошипов выполнена в виде эксцентрикового пальца,
4 Сбрасыватель груза, содержащий
5 кривошипно-шатунный механизм, включающий два кривошипа, шарнирно связанных с общим шатуном, один из которых соединен с приводом, а другой - с рабочим органом, о тличающий30 с я тем, что, с делью увеличения производительности работы сбрасывателя, шатун выполнен телескопически раздвижным.
А-А
15
Фиг.2
2S
fpu.
33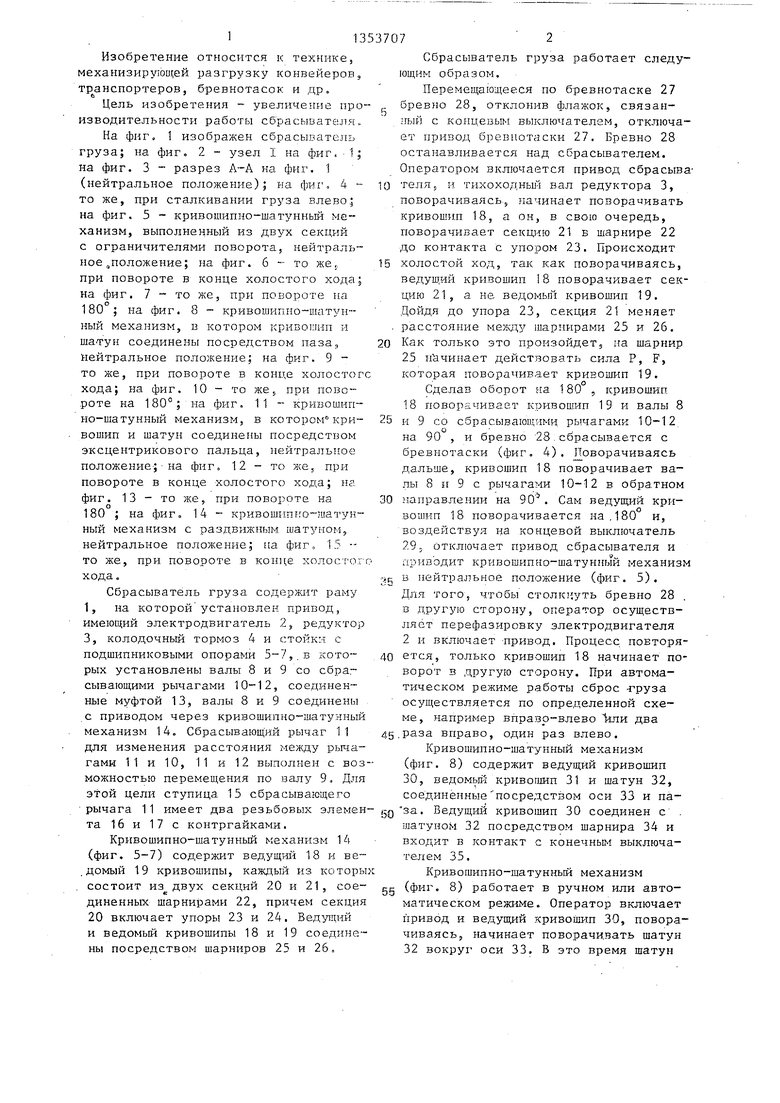
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| УСТАНОВКА ДЛЯ СОРТИРОВКИ ДРЕВЕСИНЫ | 1971 |
|
SU291853A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Машина для крепления деталей низа обуви по контуру, например ранта | 1987 |
|
SU1477371A1 |
| УСТРОЙСТВО С ПОВОРОТНОЙ КРЕПЕЖНОЙ ПАНЕЛЬЮ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 2019 |
|
RU2796028C2 |
| Швейная машина цепного трехниточного стежка | 1988 |
|
SU1715907A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |
| МУСКУЛЬНЫЙ С АККУМУЛИРОВАННОЙ ЭНЕРГИЕЙ ВОЗДУШНО-ВИНТОВОЙ ТРАНСПОРТ | 2012 |
|
RU2500546C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
Изобретение относится к технике, механизирующей разгрузку конвейеров, транспортеров, бревнотасок и т.д. Цель изобретения - увеличение производительности работы сбрасывателя. Сбрасыватель груза содержит раму 1, на которой установлен привод, имеющий электродвигатель 2, редуктор 3, колодочный тормоз 4 и стойки с подшипниковыми опорами 5-7, в которых установлены валы 8 и 9 со сбрасывающими рычагами 10-12, соединенные муфтой 13, валы 8 и 9 соединены с приводом через кривошкпно-шатунный механизм 14. Сбрасывающий рычаг 11 для изменения расстояния между рычагами 11 и 10, 11 и 12 выполнен с возможностью перемещения по валу 9. Для этой цели ступица сбрасывающего рычага 1 1. имеет два резьбовых элемента с контргайками. Кривошипно-шатунг ный механизм 14 содержит ведущий кривошип и шатун, состоящий из двух секций, соединенных шарниром, причем секция имеет упоры. Ведущий и ведо- мьш кривошипы соединены шарнирами. 4 с.п.ф-лы, 15 ил. с с: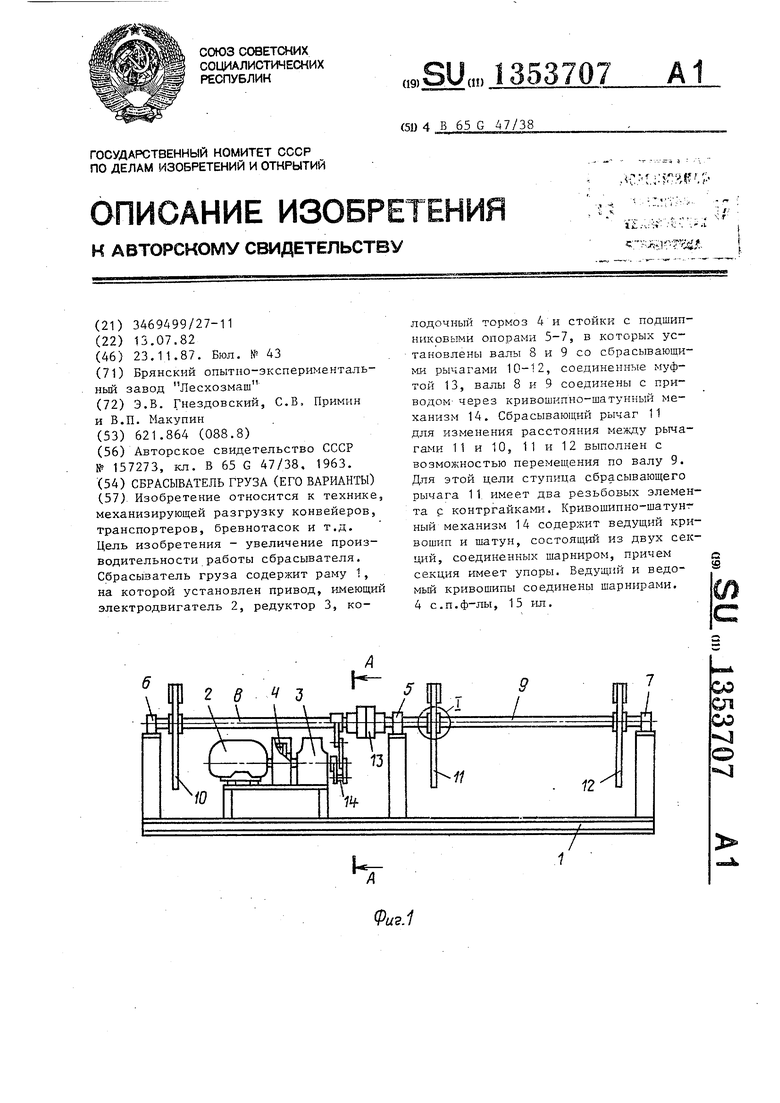
Фи.8
J
Фиг.9
32
Фа. 10
J7Фиг11
Фиъ.1Ъ
ED
Г Т
5/1:
Фм.1
Составитель Л, Трофимчук Редактор О. Юрковецкая Техред И.ВересКорректор С.Черни
Заказ 5985Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
9аг.15
| 0 |
|
SU157273A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
