13
Изобретение относится к подъемно- транспортному машиностроению, а именно к системам управления грузоподъемными средствами, и является усовершенствованием системы управления по авт. св. № 893824.
Цель изобретения - обеспечение безопасности работы.
На чертеже изображена система уп- равления грузоподъемным средством.
Система управления содержит узел управления приводом 1 подъема, один вход которого соединен с питающей магистралью, второй - с выходом пе- реключателя 2 и входом дополнительного двухпозиционного пневмораспредели теля 3 с пружиной 4, а выход связан с рабочей полостью силового цилиндра 5 привода подъема и входом клапана 6 последовательности с регулируемым винтом 7, причем выход клапана 6 последовательности соединен с управляющим каналом дополнительного пнев- мораспределителя 3, выход которого через инерционный элемент 8 подключен к каналу управления пневморас- пределителя привода 9 захвата, имеющего связь с силовым цилиндром привода 10 захвата.
Система управления грузоподъемным средством работает следующим образом
В исходном состоянии захватное устройство разжато, т.е. на выходе переключателя 2 есть устойчивый сиг
нал, которьй переключает пневморас- пределитель привода 9 захвата на вьщачу сигнала разжима захвата. Одновременно с этим выходной сигнал переключателя 2 поступает на вход узла управления приводом 1 подъема, преобразуется там в выходной сигнал, который и поддерживает в рабочей полости силового цилиндра 5 привода подъема давление, уравновешивающее грузоподъемное средство без груза. Оператор подводит захват к изделию и выключением переключателя 2 производит зажим, а затем подъем изделия. Узел управления приводом 1 подъема реагирует на вес груза, формируя сигнал управления силовым цилиндром 5 привода подъема, т .е. поддерживая в рабочей полости силового цилиндра привода подъема давление, уравновешивающее вес груза, на которое, при соответствующей настройке регулировочного винта 7, реагирует клапан 6 последовательности, вьфабатывая сиг
5 0 5 0
5
0
5
0
5
нал управления дополнительным пнев- мораспределителем 3, больший чем усилие пружины 4. Дополнительный пневмораспределитель 3 переключается, соединяя с атмосферой управляющий канал пневмораспределителя 9. Таким образом, случайные срабатывания переключателя 2 при перемещении оператором груза не могут прирести к разжиму губок захвата, так как переключатель 2 оказывается отсеченным от линии инерционный элемент 8 - пневмораспределитель привода захвата 9 - . силовой цилиндр привода захвата 10.
Когда оператор поместит зажатое изделие на ложемент выгрузки, давление в рабочей полости силового цилиндра привода подъема, уравновешивающее вес груза, упадет., клапан 6 последовательности перестает вырабатывать управляющий сигнал на дополнительный пневмораспределитель 3, который под действием пружины 4 переключается, подсоединяя переключатель 2 к управлению силовым цилиндром привода зах- |вата. Оператор переводит переключатель 2 в положение, соответствующее разжиму изделия, захват разжимается, причем благодаря наличию инерционного элемента 8 вначале узел управления приводом 1 подъема формирует сигнал уравновешивания грузоподъемного средства без груза, а уже потом разжимаются захваты.
Формула изобретения
Система управления грузоподъемным средством по авт.св. № 893824, отличающаяся тем, что, с целью обеспечения безопасности работы, она снабжена дополнительным двухпозиционным пневмораспределителем и клапаном последовательности, причем вход дополнительного пневморас- пределителя связан с магистралью, соединяющей переключатель и один из входов узла управления приводом подъема, а вькод через инерционное звено, соединен с пневмораспределителем привода захвата, канал управления подключен к выходу клапана последовательности, который своим входом подсоединен к магистрали, соединяющей узел управления приводом подъема и рабочую полость силового цилиндра привода подъема.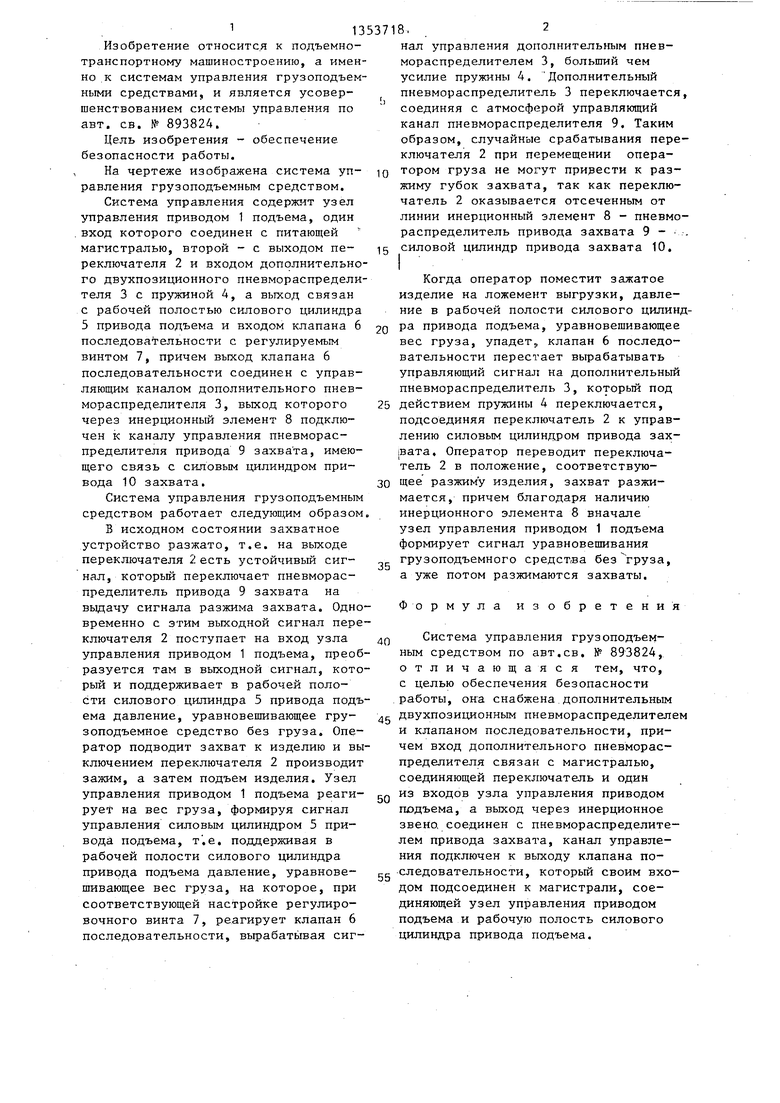
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузоподъемным средством | 1980 |
|
SU893824A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| Пневмогидравлический телескопический грузоподъемник | 1990 |
|
SU1807250A1 |
| Привод вертикального перемещения стола пакетирующего устройства | 1985 |
|
SU1375539A1 |
| Дозатор сыпучих материалов | 1990 |
|
SU1760363A1 |
| "Трубопоршневая установка "Контроль-3" | 1990 |
|
SU1767356A1 |
| Манипулятор | 1984 |
|
SU1283087A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к системам управления грузоподъемными средствами. Цель изобретения - обеспечение безопасности работы. Система содержит узел управления приводом подъема 1, один вход Г которого соединен с питающей магист-. ралью, а другой - с выходом переклю- чателя 2 и входом дополнительного двухпозиционного.пневмораспредели- теля 3, а выход с рабочей полостью силового цилиндра 5 привода подъема и входом клапана 6 последовательности. Выход последнего соединен с управляющим каналом дополнительного пневмораспределителя 3, выход которого через инерцнонньм элемент 8 подключен к каналу управления пневмораспределителя привода захвата 9, имеющего связь с силовым цилиндром привода захвата 10. Случайные срабатывания переключателя 2 при перемещении оператором груза не могут привести к разжиму губок захвата. 1 ил. с 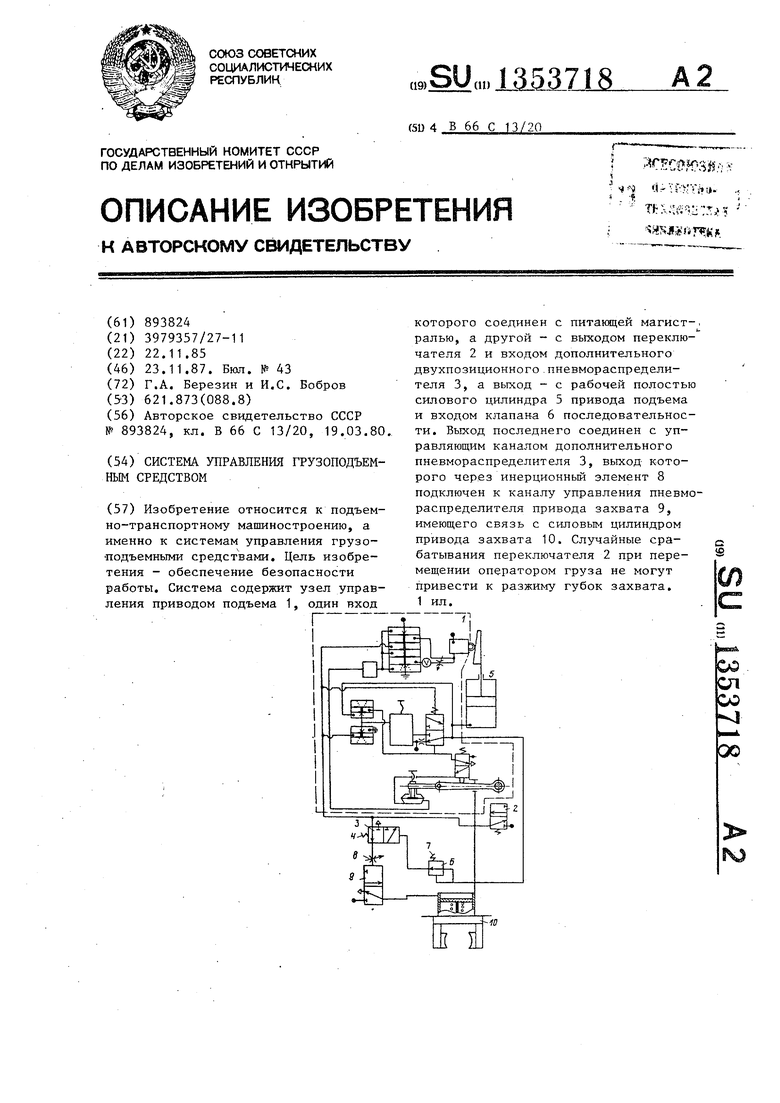
| Система управления грузоподъемным средством | 1980 |
|
SU893824A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
