Изобретение относится к робототехнике и может быть использовано при создании очувствленных манипуляторов.
По основному авт. св. № 582960 известно устройство для управления дистанционным манипулятором, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен к входу первого сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соеди-ненные электропривод и датчик угла задаюп1его органа подключен к втором входу.второго сумматора, второй выход гидропривода соединен со входом датчика угла исполнительного органа, а выход датчика момента подключен к второму входу первого сумматора lj .
Недостатком известного устройства является невысокая точность ощущения оператором нагрузочных моментов манипулятора из-за наличия сухого и вязкого трения в электроприводах исполнительного органа.
Цель изобретения - повышение точности устройства.
Цель достигается тем, что в устройство, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последователно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход кторого подключен к первому входу первого сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электроприво и датчик угла задающего органа подключен к второму входу второго суммтора, второй выход гидропривода соединен со входом датчика угла исполнительного органа, а вькод датчика момента подключен к второму выходу первого сумматора, введены последовательно соединенные блок коррекции блок выделения модуля, блок умножения и интегратор, а также последовательно включенные дифференциатор и третий сумматор, выход которого подключен ко второму входу блока умножения, а второй вход - к выходу первого сумматора и первому входу блока коррекции, соединенного вторым входом с выходом датчика давления, вход диф(})еренциатора подключен к выходу датчика угла исполнительного органа, а выход интегратора соединен со вторым входом усилителя.
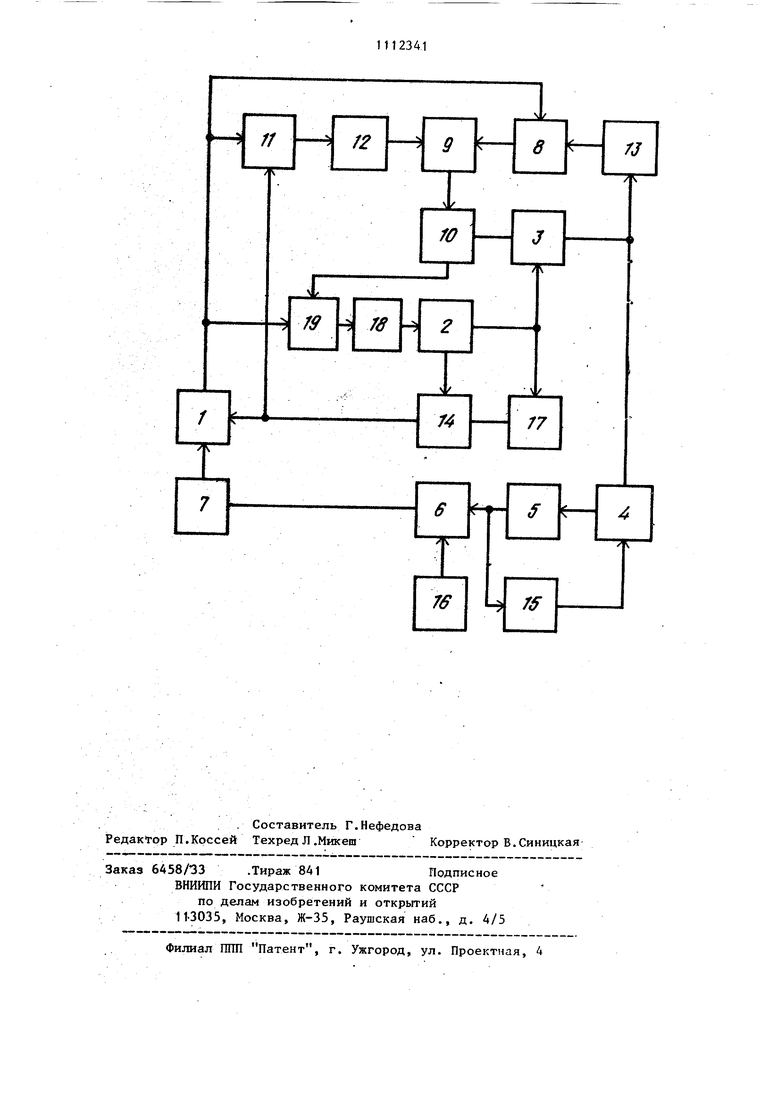
На чертеже представлена функциональная схема устройства.
Устройство содержит первый сумматор 1, гидропривод 2, датчик 3 угла исполнительного органа, второй сумматор 4, электропривод 5, упругий элемент 6, датчик 7 момента, третий сумматор 8, блок 9 умножения, интегратор 10, блок 11 коррекции, блок 12 вьщеления модуля, дифференциатор 13, датчик 14 давления, датчик 15 угла задающего органа, задающий орган 16, исполнительный орган 17, электрогидроусилитель 18, усилитель 19.
Устройство работает следующим об разом.
Оператор через задающий орган 16 воздействует на упругий элемент 6 и создает на нем некоторый момент. Датчик 7 момента вырабатывает сигнал, пропорциональный этому моменту. Сигнал с датчика 7 поступает на первый вход первого сумматора 1, на второй вход которого подается сигнал с датчика 14 давления, пропорциональный моменту, действующему на исполнительный орган 17. Разностный сигнал с первого сумматора 1 подается на вход усилителя 19. Исполнительный
орган 17 при этом двигается со скоростью, пропорциональной разности моментов, развиваемьк оператором на задающем органе 16, и моментов, действующих на исполнительном органе 17.
Электропривод 5 осуществляет слежение задающего органа 16 за положением исполнительного органа 17, слежение происходит под действием сигнала со второго сумматора 4, сравнивающего сигналы с датчиков 3 и 15 исполнительного и задающего органов
5 16 и 17 соответственно.
Нейтрализация влияния сухого и вязкого трения достигается путем организации нелинейного контура управ3ления скоростью движения гидропривода 2 с астатизмом первого порядка Контур замыкается по выходному сигналу с дифференциатора 13, пропорци нальному управляемой скорости, посредством последовательно соединенных третьего сумматора 8, являющегося элементом сравнения, блока 9 умножения и интегратора 10, обеспечивающего астатизм контура. Выходной сигнал интегратора 10 подается на второй вход усилителя 19. Блок 9 умножения обеспечивает изм няемый, в зависимости от сигнала, по даваемого на его первый вход, коэффициент передачи контура, т.е. изменяемую добротность контура. Управляющий коэффициентом передачи сигналом является выходной сигнал с блока 12, который пропорционален абсолютному значению сигнала на его входе, что необходимо для неизменности знака обратнойсвязи организуемого контура управления скоростью. Выходной сигнал блока 11 коррекции пропорционален линейной комбинации выходного сигнала первог сумматора 1 и пе)вой производной выходного сигнсгла датчика 1А. Таким образом, коэффициент передачи контура управления скоростью изменяется в зависимости -от уровня входного воздействия с первого сумматора 1, т.е. задаваемой скорости, и временных характеристик сигнала с датчика 14 давления, несущего инфор мацию о величине действующего на ис полнительный орган 17 момента нагру ки и величине момента сухого .трения в гидроприводе 2. Наличие в законе 414 управления коэффициентом передачи контура составляющей, пропорциональной первой производной выходного сигнала датчика 14 обеспечивает возможность в момент изменения знака скорости выходного вала гидропривода 2, когда имеет место резкий перепад момента сухого трения, получить значение коэффициента передачи контура, достаточное для компенсации влияния этого перепада. Преодоление гидроприводам 2 перепада момента сухого трения при высокой в этот момент добротности контура управления скоростью происходит благодаря выходному Сигналу с интегратора 10 при незначительном сигнале с первого сумматора 1, т.е. оператор не почувствует процесс преодоления этого момента. После преодоления перепада момента сухого трения возможность изменения выходного сигнала интегратора 10 определяется составляющей в законе управления коэффициентом контура, пропорциональный сигналу с первого сумматора 1, т.е. скорости движения гидроприпода 2 или в соответствующем масштабе вязкому трению. Таким образом, выходной сигнал интегратора 10 является сигналом компенсации сухого и вязкого трения гидропривода 2, а процесс управления движением исполнительного органа 17 осущес вляется оператором без преодоления моментов сухого и вязкого трений. Применение изобретения позволяет за счет компенсации сухого и вязкого трения в гидроприводе повысить точность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1989 |
|
SU1834795A3 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ МАНИПУЛЯТОРОМ по |авт. св. № 582960, о т л и ч а ю щ. е е с я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные блок коррекций, блок вьщеления модуля, блок умножения и интегратор, а также последовательно включенные дифференциатор и третий сумматор, выход которого подключен ко второму входу блока умножения, а второй вход - к выходу первого сумматора и первому входу блока коррекции, соединенного вторым входом с выходом датчика давления, вход дифференциатора подключен к выходу датчика угла исполнительного органа, а выход интегратора соединен со BTOpbw входом усилителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
