Изобретение относится к робототехнике и может быть использовано при создании дистанционных копирующих манипуляторов
Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения согласования положения задающего и исполнительного ор- анов манипулятора
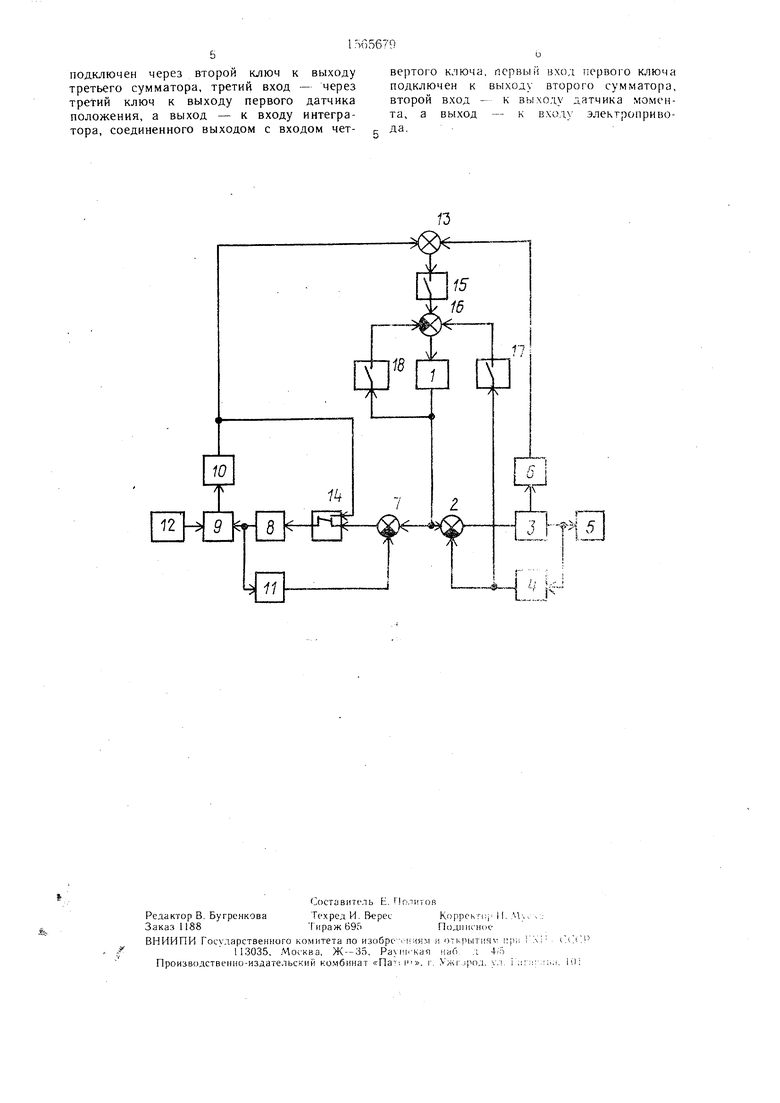
На чертеже представлена функциональная схема устройства
Устройство содержит интегратор 1, первый сумматор 2, электро: идропривод 3, первый датчик 4 положения, исполнительный орган 5, датчик 6 давления, второй сумматор 7, электропривод 8, упругий элемент 9, датчик 10 момента, второй датчик 11 положения, задающий орган 12, третий сумматор 13, первый и ггорой к/чо- чи 14 и 15 соответственно, четвертый сумматор 16, третий и четвертым ключи 17 и 18 соответственно.
Устройство работает следующим образом.
В исходном положении ключ 15 разомкнут, выход ключа 14 соединен с его вторым входом, ключи 17 и 18 замкнуты Исполнительный опган Г и за гаю тин орган 12 u i ч в не-ч ../-чо- положении причем их взаимное .ч) in жение может быть произвольным, р i r,i i « ле и. рассогласованном rn. o .c и желне с „сзк :цего л ь . ш векмв е положен -и -,) . гана 5
Пеоед а J io р., окормо- ь действия на за iau щии JPI. i - i з.югеш ;5 iaii % t,, i чтобы изменение выходном о cnii, ;. i чика 10, измсряюще, дефопм.1 Мк) чр того элемсша 9 и оедипеьи , о ч; ключ 14 с вхидом злектропрнво.м привело к включению злектроприко а 8 и перемещению его Bi M i;oto чо.К и , v, ненного L чим через u задающего opi ана 12 i чаправ ie i, имм BIITCTB :ощем по о . г исг1 .ч ч органа 5 Н ом 1,ас ам : ч задающею 12 и нпюлчигслым i ,i o;i ,, ч. cos 1-к-оьанн, n.uparop i, a k. воздействие на зад.1. 1,1 opi,, : . , включения стройсгвс. в работ tieooxo ч мо замкн ть л iio-i ю, соединить выхо i ключа 14 с ею первым входом и ра
1..
дте-А
О.
;
зомкнуть ключи 17 и 18. В этом случае вход интегратора 1 через, сумматор 16, ключ 15 и сумматор 13 соединен с выходами датчиков 10 и 6. При этом при отсутствии силовых воздействий оператора на задающий орган 12 ч внешней нагрузки на исполнительный орган 5 выходной сигнал интегратора 1 соответствует по величине выходным сигналам датчиков 11 и 4, что определяет нулевое значение сигналов с выходов сумматоров 7 и 2 и исключает при включении устройства в работу неуправляемые перемещения и нагрузки электропривода 8 и электрогидропривода 3 под действием переходных процессов.
При выполнении работ оператор, воздействуя на сдающий орган 12, формирует управляющие сигналы с помощью упругого элемента 9 и датчика 10, которые поступают через суммаюр 13, ключ 15 и сумматор 1Ь на вход интегратора 1. На вычоде шреграюра 1 формируются cm налы управ, м-ния замкнутыми по положению элекфочриводом rt и электрогидроприводом 3 Под юйсгвием управляющих гиi на: он с выхода интегратора 1, поступающих па первые входы сумматоров 7 и 2. i ектропривод 8 и электро- гидроприво.1 3 перемещают соответственно задающий и исполнительный органы 5 и 12 со скоростью, пропорциональной управляющему воздействию оператора на задающий орган 12 Р.сли при движении исполнительною органа 5 на него воздействует внешняя нагрузка, го величина этой натрузки измеряемся датчиком 6, выходной сиишл которою поступает на сумматор 13. где сравнивания с сигналом датчика К), ахи ветствуюшим управляющему воздействию оператора Н рс зультате это о на выходе сумматора 13 формируется сигнал, пропорциональный сумме (если нагрузка на исполнительный орган 5 направлена в сторону двп/кенпя) или разности (если пагрх зка навстречу движению) силовых воздействий опсраюра га :a,taio- щии орган 12 и нагру ки на исполнительный орган 5 Под деист miev . иг налов о вычо i.a сумматора S3, поступающих через ключ l. j, сумматор 1 э и итератор 1 на входы сумматоров 7 и 2, электропривод 8 и - лектрогидропривод 3 перемещают задающий и исполнительный органы 2 i Б со скоростью, пропорциональной ч мс или разности силовых воздействий, жженных к задающему и исполнитель- му органам 12 и 5.
Если в процессе работы устройства требуется обеспечить длительное неподвижное положение задающего и исполнительного органов 12 и 5, то для выполнения этой операции ключи 15, 17 и 18 разомкнуты. При этом значение выходного сигнала интегратора 1 будет соответствовать выходным сигналам датчиков 11 и 4 углов задающего и исполнительного органов 12 и 5 соответственно и оставаться неизменным независимо от силовых воздействий на задающий и исполнительный органы 12 и 5. Это позволяет освободить оператора от участия в длительных операциях но удержанию за .дающего и исполнительного органов 12 и 5
в неподвижном положении и обеспечивает высокую точность удержания неподвижного положения.
Для вывода задающего и исполнительного органов 12 и 5 из непогвижного положения необходимо замкнуть ключ 15 и разомкнуть ключи 17 и 18. Это обеспечивает подключение выхода третьего сумматора 13 к входу интегратора 1, на выходе которого в зависимости от управляющих воздействий оператора на задаю0 щий орган 12 и нагрузки на исполнительный орган 5 формируются сигналы управления, в соответствии с которыми осуществляется движение выходных валов электропривода 8 и электрогидропривода 3 и связанных с ними задающего 12 и исполнительного 5 органов соответственно.
Для выключения устройства необходимо установить исполнительный орган 5 в исходное положение, разомкнуть ключ 15, замкнуть ключи 17 и 18, выход ключа 14
0 соединить с его вторым входом. Воздействуя на задающий орган 12 и управляя движением выходного вала электропривода 8 с помощью изменения сигнала датчика 10, соединенного через второй вход второго ключа 14 со входом электропривода 8,
5 можно установить в требуемое положение задающий орган 12.
Формула изобретения
5
Устройство для управления манипулятором, содержащее последовательно соединенные интегратор, первый сумматор и электрогидропривод, связанный гидравлически с датчиком давления, а кинематически - с первым датчиком положения, электропривод, кинематически связанный через упругий элемент с датчиком момента и непосредственно с вторым датчиком положения, соединенным выходом с первым входом второго сумматора, второй вход которого подключен к выходу интегратора, а также третий сумматор, соединенный первым входом с выходом датчика давления, а вторым входом с выходом датчика момента, отличающееся тем, что, с целью расширения функциональных возможностей, оно дополнительно содержит первый,
второй и третий ключи, а также после- довательно соединенные четвертый ключ и четвертый сумматор, второй вход которого
подключен через второй ключ к выходу третьего сумматора, третий вход - через третий ключ к выходу первого датчика положения, а выход - к входу интегратора, соединенного выходом с входом четвертого ключа, первый i nopBOto ключа подключен к выход второго сумматора, второй вход - к днтчика момента, а выход - к электропривода
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1989 |
|
SU1834795A3 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1252163A1 |
Изобретение относится к робототехнике и может быть использовано при создании дистанционных копирующих манипуляторов. Целью изобретения является расширение функциональных возможностей устройства. В устройстве с помощью введенных ключей производится коммутация цепей управления приводами задающего и исполнительного органов, что обеспечивает удержание в заданном положении органов, а также согласование положения задающего и исполнительного органов. Устройство также содержит интегратор, четыре сумматора, электрогидропривод и электропривод, датчики давления и положения, упругий элемент. 1 ил.
J I ffJ
™ V1 J
| Проектирование следящих систем двустороннего действия Под р д ва В | |||
| С | |||
| - М.: Машиностроение | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
